
 | Manualzz")
OMRON Product References All OMRON products are capitalized in this manual. Visual Aids Note The following headings appear in the left column of the manual to help you locate different types of information. Indicates information of particular interest for effecient and convenient operation of the product. The finless type is the recognized component by Underwriters Laboratories Inc. This manual describes “Conditions of acceptability”. OMRON, 2001 All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form, or by any means, mechanical, electronic, photocopying, recording, of orherwise, without the prior written permission of OMRON. No patent liability is assumed with respect to the use of the information contained herein. Moreover, because OMRON is constantly striving to improve its high-quality products, the information contained in this manual is subject to change without notice. Every precaution has been taken in the preparation of this manual. Nevertheless, OMRON assumes no responsibility for errors or omissions. Neither is any liability assumed for damages resulting from the use of the information contained in this publication. 0 INSTALLATION GUIDELINE 3G3MV / 3G3JV FINLESS TYPE 1 2 PREFACE OMRON’S 3G3MV/3G3JV are easy and simple frequency inverter. This manual describes installation conditions and dimensions of 3G3MV/3G3JV. Read this instruction manual thoroughly before operation. The finless type inverter is the recognized component by Underwriters Laboratories Inc. This manual describes “Conditions of acceptability.” Read this installation guideline and the instruction manual of the inverter thoroughly before installation and operation. Following shows the manual No. of user manuals: 3G3MV: I527-E2, 3G3JV: I528-E2 OMRON Europe B.V. General precautions • This manual may be modified when necessary because of the improvement of the product, modification, or changes in specifications. Such modifications are denoted by a revised manual No. • To order a copy of this manual, if your copy has been damaged or or lost, contact your OMRON representative. • OMRON is not responsible for any modification of the product made by the user, since that will void your guarantee. 3 ! " # # ! " ## ! " # # # 4 *+*,!-. ! / ' , ! , / # # # '01. 2 3 # / , # # # # , / , , , , , # # , /# 4 4 4 4 4 5 4 2 3 4 5 # # 4 / , ! # # * , / , ! , / 4 4 4 5 4 5 6 ! 5 / / 5 ' ! ' # # ' 6/ 6/ % 6 6 / # # , ' %# -# ( , # # # # / , # # # # / , , / , ! , / , , , 5 2 3 , ) *) ; 7 6 % # # 4'4<.. , % 6 ! ) / , / , , , , ! # '01. 2 3 # / # # " / , / % , / ' ! ' , # # Do not change wiring, disconnect connector, the Operator, or optional items, or Replace fans while power may result in injury, damage ,isbeing supplied. Doing so to the product, or malfunction. 8 ■ Warnings for UL/cUL Marking • Do not connect or disconnect wiring, or perform signal checks while the power supply is turned ON. • The Inverter internal capacitor is still charged even after the power supply is turned OFF. To prevent electrical shock, disconnect all power before servicing the Inverter. Then wait at least one minute after the power supply is disconnected and all indicators are OFF. • Do not perform a withstand voltage test on any part of the Inverter. This electronic equipment uses semiconductors and is vulnerable to high voltage. • Do not remove the Digital Operator or the blank cover unless the power supply is turned OFF. Never touch the printed control board (PCB) while the power supply is turned ON. • The Inverter is not suitable for use on a circuit capable of delivering more than 5.000 RMS symmetrical amperes, 250 volts maximum (200V-class Units) or 18.000 RMS symmetrical amperes, 480 V maximum (400-V-class Units). CAUTION Use 75°C copper wires or equivalent. Low voltage wires shall be wired with Class I Wiring. 9 Checking Before Unpacking ■ Checking the Product On delivery, always check that the delivered product is the SYSDRIVE 3G3MV or 3G3JV Inverter that you ordered. Should you find any problems with the product, immediately contact your nearest local sales representative. • Checking the Nameplate • Checking the Model Installation Type A Panel mounting models (IP10 min.) or Wall mounting closed models. Voltage Class 2 Three-phase 200-VAC input (200-V class) B Single-phase 200-VAC input (200-V class) 4 Three-phase 400-VAC input (400-V class) 10 Maximum Applicable Motor Capacity 001 0.1 (0.1) kW 002 0.2 (0.25/0.37) kW 004 0.4 (0.55) kW 007 0.75 (1.1) kW 015 1.5 (1.5) kW 022 2.2 (2.2) kW 030 3.0 (3.0) kW 040 4.0 (4.0) kW 055 5.5 (5.5) kW (only 3G3MV) 075 7.5 (7.5) kW (only 3G3MV) Note The figures in parentheses indicate capacities for motors used outside Japan. Front cover options N No potentiometer Heatsink option Z Finless type • Checking for Damage Check the overall appearance and check for damage or scratches resulting from transportation. ■ Application Precautions You must allow sufficient leeway in ratings and performance and provide proper fail-safe and other safety measures when using the Inverter in any of the following applications. Be sure also to consult with your OMRON representative before actually attempting any of these applications. 1. 2. 3. Applications under conditions or invironments not specified in user manuals. Applications for nuclear control systems, railroad systems, aviations systems, vehicles, combustions systems, mesical equipment, amusement machines, and safety equipment. Applications for other systems, machines, and equipment that may have a serious influence on lives and property if used improperly. 11 CONDITIONS OF ACCEPTABILITY (1) In the end use application the enclosure internal temperature shall not exceed 50 Degrees C (122°F). Refer to the next page for details of mounting dimensions. (2) The maximum heatsink temperature shall not exceed 90 Degrees C (194°F). The temperature shall be 80 Degrees C (176°F) or less for inverters of 5.5/7.5 kW. The inverter generates the heat loss. Refer to Table 1. (3) The mating surface shall have the following properties: Surface flatness shall not exceed 0.2 mm across the entire cross sectional area of item 1. Surface finish shall not exceed 25S. (4) The surrounding mounting space (between device and enclosure) shall have the following dimentions: 30 mm or greater from each side (inverters of 4.0 kW or less) 50 mm or greater from each side (inverters of 5.5/7.5 kW) 100 mm or greater from top and bottom For details or the mounting space, refer to fig. 1. (5) Recommended thermal compound to be applied on item 1 shall be Type G746, manufactured by Shin-Etsu Chemical Co., Ltd. or equivalent. 100 µ m shall be applied evenly across the entire surface area (inverters of 4.0 kW or less) (6) M4 screws shall be used for secureness onto end use heatsink with a tightening torque of 1.0 to 1.3 N.m. M5 (inverters of 5.5/7.5 kW) screws shall be used for secureness onto end use heatsink with a tightening torque of 2.0 to 2.5 N.m. Caution : When the inverter is not mounted adequately, it may cause overheating or damage the inverter. 12 a a Voltage Max. Applicable Motor Output kW (HP) Length of a 200 V single-phase 3.7 kW (5HP) or less 3-phase 400 V 3-phase 30 mm (1.18 in.) or more 200 V 3-phase 400 V 3-phase 50 mm (1.97 in.) or more 5.5 kW (7.5HP) 7.5 kW (10HP) Fig. 1 Mounting dimensions Table 1 Heat Loss 3G3MV/3G3JV Model 200 V single phase 3G3 (MV/JV) AB models AB001 AB002 AB004 AB007 AB015 AB022 AB040 Heatsink (W) 3.7 7.7 15.8 28.4 53.7 64.5 98.2 Inside unit (W) 10.4 12.3 16.1 23.0 29.1 49.1 78.2 Total (W) 14.1 20.0 31.9 51.4 82.8 113.6 176.4 Model 200 V three phase 3G3 (MV/JV) A2 models A2001 A2002 A2004 A2007 A2015 A2022 A2040 A2055* A2075* Heatsink (W) 3.7 7.7 15.8 28.4 53.7 60.4 96.7 170.4 219.2 Inside unit (W) 9.3 10.3 12.3 16.7 19.1 34.4 52.4 79.4 98.9 13.0 18.0 28.1 45.1 72.8 94.8 149.1 249.8 318.1 Total (W) Model 400 V three phase 3G3 (MV/JV) A4 models A4002 A4004 A4007 A4015 A4022 A4030 A4040 A4055* A4075* Heatsink (W) 9.4 15.1 30.3 45.8 50.5 58.2 79.9 168.8 209.6 Inside unit (W) 13.7 15.0 24.6 29.9 32.5 37.6 49.2 87.7 99.3 Total (W) 23.1 30.1 54.9 75.7 83.0 95.8 129.1 256.5 308.9 *Note: only for 3G3MV 13 14 ■ Wiring 3G3JV • control circuit Multi-function Contact Output (MA, MB, and MC) Terminal screw size M3 Tightening torque N • m 0.5 to 0.6 Wire Wire size mm2 (AWG) Single wire 0.5 to 1.25 (20 to 16) Stranded wire Recommended wire size mm2 (AWG) 0.75 (18) 0.5 to 1.25 (20 to 16) Cable Cable with polyethylene sheath Sequential Input (S1 through S5 and SC) and Analog Monitor (AM or AC) Terminal screw size M2 Tightening torque N • m 0.22 to 0.25 Wire Wire size mm2 (AWG) Single wire 0.5 to 1.25 (20 to 16) Stranded wire Recommended wire size mm2 (AWG) 0.75 (18) 0.5 to 0.75 (20 to 18) Cable Cable with polyethylene sheath Frequency Reference Input (FR, FS, and FC) Terminal Tightening screw size torque N • m M2 Wire Wire size mm2 (AWG) Recommended wire size mm2 (AWG) 0.22 to 0.25 Single wire 0.5 to 1.25 0.75 (18) (20 to 16) Stranded wire 0.5 to 0.75 (20 to 18) 15 Cable Special cable with polyethylene sheath and shield for measurement use • Main circuit (power cables: 600V vinyl cables, etc.) 3-phase 200-VAC Model Model 3G3JV- Terminal symbol Screw tightening torque (N•m) Wire size (mm2) Recom- Moldedmended case wire size circuit (mm2) breaker capacity (A) 0.8 to 1.0 0.75 to 2 2 5 Terminal screw A2001 R/L1, S/L2, T/L3, -, +1, M3.5 +2, U/T1, V/T2, W/T3 A2002 R/L1, S/L2, T/L3, -, +1, M3.5 +2, U/T1, V/T2, W/T3 0.8 to 1.0 0.75 to 2 2 5 A2004 R/L1, S/L2, T/L3, -, +1, M3.5 +2, U/T1, V/T2, W/T3 0.8 to 1.0 0.75 to 2 2 5 A2007 R/L1, S/L2, T/L3, -, +1, M3.5 +2, U/T1, V/T2, W/T3 0.8 to 1.0 0.75 to 2 2 10 A2015 R/L1, S/L2, T/L3, -, +1, M3.5 +2, U/T1, V/T2, W/T3 0.8 to 1.0 2 to 5.5 2 20 A2022 R/L1, S/L2, T/L3, -, +1, M3.5 +2, U/T1, V/T2, W/T3 0.8 to 1.0 2 to 5.5 3.5 20 A2040 R/L1, S/L2, T/L3, -, +1, M3.5 +2, U/T1, V/T2, W/T3 1.2 to 1.5 2 to 5.5 5.5 30 Single-phase 200-VAC Model Model 3G3JV- Terminal symbol Terminal torque (N•m) Terminal screw Wire size (mm2) AB001 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 Recom- Circuit mended breaker wire size capacity (A) (mm2) 0.75 to 2 2 5 AB002 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 0.75 to 2 2 16 5 AB004 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 Recom- Circuit mended breaker wire size capacity (A) (mm2) 0.75 to 2 2 10 AB007 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 2 to 5.5 3.5 AB015 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 2 to 5.5 5.5 Model 3G3JV- Terminal symbol Terminal screw Terminal torque (N•m) Wire size (mm2) 20 2 20 2 3-phase 400-VAC Model Model 3G3JV- Terminal symbol Terminal screw Terminal torque (N•m) Wire size (mm2) A4002 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 2 to 5.5 Recom- Circuit mended breaker wire size capacity (A) (mm2) 2 5 A4004 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 2 to 5.5 2 5 A4007 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 2 to 5.5 2 5 A4015 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 2 to 5.5 2 10 A4022 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M4 1.2 to 1.5 2 to 5.5 2 10 A4030 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M4 1.2 to 1.5 2 to 5.5 2 20 3.5 A4040 R/L1, S/L2, T/L3, -, +1, +2, U/T1, V/T2, W/T3 M4 1.2 to 1.5 2 to 5.5 2 3.5 17 20 • Standard connections 3G3JV 18 ■ Wiring 3G3MV • control circuit Multi-function Contact Output (MA, MB, and MC) Terminal screw size M3 Tightening torque N • m 0.5 to 0.6 Wire Wire size mm2 (AWG) Single wire 0.5 to 1.25 (20 to 16) Stranded wire Recommended wire size mm2 (AWG) 0.75 (18) 0.5 to 1.25 (20 to 16) Cable Cable with polyethylene sheath Sequential Input (S1 through S7 and SC), Multi-function Photocoupler Output (P1, P2, PC), RS-422/485 Communications (R+, R-, S+, S-) and Multi-function Analog Output (AM or AC), and Pulse Train Input (RP) Terminal Tightenscrew size ing torque N•m M2 Wire Wire size mm2 (AWG) 0.22 to 0.25 Single wire 0.5 to 1.25 (20 to 16) Stranded wire Recommended wire size mm2 (AWG) 0.75 (18) Cable Cable with polyethylene sheath 0.5 to 0.75 (20 to 18) Frequency Reference Input (FR, FS, and FC) Terminal Tightening screw size torque N•m M2 Wire Wire size mm2 (AWG) Recommended wire size mm2 (AWG) 0.22 to 0.25 Single wire 0.5 to 1.25 0.75 (18) (20 to 16) Stranded wire 0.5 to 0.75 (20 to 18) 19 Cable Special cable with polyethylene sheath and shield for measurement use • 3-phase 200-VAC Model Model 3G3MV- Terminal symbol Termi- Screw tightennal ing screw torque (N•m) Wire size (mm2) Recom- Molded case mended circuit wire breaker size (mm2) capacity (A) A2001 R/L1, S/L2, T/L3, B1, B2, M3.5 -, +1, +2, U/T1, V/T2, W/T3 0.8 to 1.0 0.75 to 2 2 5 A2002 R/L1, S/L2, T/L3, B1, B2, M3.5 -, +1, +2, U/T1, V/T2, W/T3 0.8 to 1.0 0.75 to 2 2 5 A2004 R/L1, S/L2, T/L3, B1, B2, M3.5 -, +1, +2, U/T1, V/T2, W/T3 0.8 to 1.0 0.75 to 2 2 5 A2007 R/L1, S/L2, T/L3, B1, B2, M3.5 -, +1, +2, U/T1, V/T2, W/T3 0.8 to 1.0 0.75 to 2 2 10 A2015 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.25 to 1.5 20 2 to 5.5 2 3.5 A2022 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.2 to 1.5 2 to 5.5 3.5 20 A2040 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.2 to 1.5 2 to 5.5 5.5 30 A2055 R/L1, S/L2, T/L3, B1, B2, M5 -, +1, +2, U/T1, V/T2, W/T3 2.5 5.5 to 8 8 50 A2075 R/L1, S/L2, T/L3, B1, B2, M5 -, +1, +2, U/T1, V/T2, W/T3 2.5 5.5 to 8 8 50 20 Single-phase 200-VAC Model Model 3G3MV- Terminal symbol Terminal screw Terminal torque (N•m) Wire size (mm2) Recommended wire size (mm2) Circuit breaker capacity (A) AB001 R/L1, S/L2, T/L3, B1, B2, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 0.75 to 2 2 5 AB002 R/L1, S/L2, T/L3, B1, B2, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 0.75 to 2 2 5 AB004 R/L1, S/L2, T/L3, B1, B2, -, +1, +2, U/T1, V/T2, W/T3 M3.5 0.8 to 1.0 0.75 to 2 2 10 AB007 R/L1, S/L2, T/L3, B1, B2, -, +1, +2, U/T1, V/T2, W/T3 M4 1.2 to 1.5 2 to 5.5 3.5 20 2 AB015 R/L1, S/L2, T/L3, B1, B2, -, +1, +2, U/T1, V/T2, W/T3 M4 1.2 to 1.5 2 to 5.5 5.5 20 3.5 AB022 R/L1, S/L2, T/L3, B1, B2, -, +1, +2, U/T1, V/T2, W/T3 M4 1.2 to 1.5 2 to 5.5 5.5 40 AB040 R/L1, S/L2, T/L3, B1, B2, -, +1, +2, U/T1, V/T2, W/T3 M5 2.3 to 2.4 5.5 to 8 8 50 M4 1.2 to 2.5 2 to 8 5.5 21 3-phase 400-VAC Model Model 3G3MV- Terminal symbol Terminal screw Screw tightening torque (N•m) Wire Recom- Moldedsize mended case circuit wire (mm2) breaker size (mm2) capacity (A) A4002 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.2 to 1.5 2 to 5.5 2 5 A4004 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.2 to 1.5 2 to 5.5 2 5 A4007 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.2 to 1.5 2 to 5.5 2 5 A4015 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.2 to 1.5 2 to 5.5 2 10 A4022 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.2 to 1.5 2 to 5.5 2 10 A4030 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.2 to 1.5 2 to 5.5 2 20 3.5 A4040 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.2 to 1.5 2 to 5.5 2 3.5 22 20 Model 3G3MV- Terminal symbol Terminal screw Screw tightening torque (N•m) Wire Recom- Moldedsize mended case circuit wire (mm2) breaker size (mm2) capacity (A) A4055 R/L1, S/L2, T/L3, B1, B2, M4 -, +1, +2, U/T1, V/T2, W/T3 1.8 5.5 5.5 30 A4075 R/L1, S/L2, T/L3, B1, B2, M5 -, +1, +2, U/T1, V/T2, W/T3 1.8 5.5 to 8 5.5 30 23 • Standard Connections 3G3MV 24 Motor Protection Settings 3G3JV Rated motor current (n32) ■ Set the rated motor current (n32) in order to prevent the motor from burning due to overloading. Check the rated current on the motor nameplate and set the parameter. This parameter is used for the electronic thermal function for motor overload detection (OL1). By setting the correct parameter, the overloaded motor will be protected from burning. Rated Motor Current n32 Setting range 0.0% to 120% (A) of rated output current of Inverter Unit of setting 0.1 A Changes during operation No Default setting (see note 1) Note 1. The standard rated current of the maximum applicable moter is the default rated motor current. Note 2. Motor overload detection (OL1) is disabled by setting the parameter to 0.0. Motor Protection Characteristics (n33 and n34) • This parameter setting is for motor overload detection (OL1). Motor Protection Characteristic Selection n33 Setting range Unit of 1 setting 0 to 2 Changes during operation No Default setting 0 Set Values Value Description 0 Protection characteristics for general-purpose induction motors 1 Protection characteristics for Inverter-dedicated motors 2 No protection • This parameter is used to set the electric thermal characteristics of the motor to be connected. • Set the parameter according to the motor. • If a single Inverter is connected to more than one motor, set the parameter to 2 for no protection. The parameter is also disabled by setting n32 for rated motor current to 0.0. n34 Setting range Motor Protection Time 1 to 60 (min) Unit of setting 1 min 25 Changes during operation No Default setting 8 Motor Protection Settings 3G3MV Rated motor current (n36) ■ • Check the motor nameplate and set this parameter to the rated current. • This parameter is used as a vector control constant. Be sure to set the parameter correctly. This set value is also used for determining the electronic thermal characteristics to protect the motor from overheating. The correct set value protects the motor from burning that may result form overloading. n036 Setting range Rated Motor Current Register 0124 Hex Changes during No operation 0.0% to 150% (A) of rated output current of the Inverter Unit of setting 0.1 A Default setting See note Note The default setting for this parameter is the standard rated current of the maximum applicable motor. Motor Protection Functions (n037 and n038) • This parameter setting is for motor overload detection (OL1). n037 Setting range Motor Protection Characteristics Register 0125 Hex Changes during operation No 0 to 2 Unit of setting 1 Default setting 0 Note The default setting for this parameter is the standard rated current of the maximum applicable motor. Set Values Value Description 0 Protection characteristics for general-purpose induction motors 1 Protection characteristics for Inverter-dedicated motors 2 No protection • This parameter is used to set the electric thermal characteristics of the motor to be connected. • Set the parameter according to the motor. • If a single Inverter is connected to more than one motor, set the parameter to 2 for no protection. The parameter is also disabled by setting n36 for rated motor current to 0.0. 26 n038 Setting range Motor Protection Time Register 1 to 60 (min) Unit of 1 min setting 0126 Hex Changes during operation No Default setting 8 Set values • This parameter is used to set the electronic thermal protection constant of motor overload detection OL1. • The default setting does not need any changes in normal operation. • To set the parameter according to the characteristics of the motor, confirm the thermal time constant with the motor manufacturer and set the parameter with some margin. In other words, set the value a little shorter than the thermal time constant. • To detect motor overloading more quickly, reduce the set value, provided that it does not cause any application problems. 27 28 DIMENSIONS Table 2 3G3MV Finless Dimensions in mm (inches) / Mass in kg (lb) Voltage class 200 V three phase Model W H D W1 H1 H2 d t Mass fig. A2001 68 (2.68) 68 (2.68) 68 (2.68) 68 (2.68) 108 (4.25) 108 (4.25) 140 (5.51) 180 (7.09) 180 (7.09) 68 (2.68) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 260 (10.24) 260 (10.24) 128 (5.04) 71 (2.82) 71 (2.82) 71 (2.82) 71 (2.82) 73 (2.87) 82 (3.23) 78 (3.07) 125 (4.92) 125 (4.92) 71 (2.82) 56 (2.20) 56 (2.20) 56 (2.20) 56 (2.20) 96 (3.78) 96 (3.78) 128 (5.04) 164 (6.46) 164 (6.46) 56 (2.20) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 244 (9.61) 244 (9.61) 118 (4.65) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 8 (0.31) 8 (0.31) 5 (0.20) M4 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 6 (0.24) 6 (0.24) 6 (0.24) 10 (0.39) 10 (0.39) 5 (0.20) 0.6 (1.32) 2 0.6 (1.32) 2 0.7 (1.54) 2 0.8 (1.76) 2 0.9 (1.98) 3 1.0 (2.20) 3 1.2 (2.64) 4 5.2 (0.20) 5.4 (0.21) 0.6 (1.32) 5 68 (2.68) 68 (2.68) 108 (4.25) 108 (4.35) 140 (5.51) 170 (6.69) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 71 (2.82) 94 (3.70) 82 (3.23) 98 (3.86) 98 (3.86) 119 (4.69) 56 (2.20) 56 (2.20) 96 (3.78) 96 (3.78) 128 (5.04) 158 (6.22) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) M4 5 (020) 5 (0.20) 6 (0.24) 6 (0.24) 6 (0.24) 10 (0.39) 0.7 (1.54) 2 0.8 (1.76) 2 1.0 (2.20) 3 1.0 (2.20) 3 1.3 (2.86) 4 2.0 (4.40) 6 A2002 A2004 A2007 A2015 A2022 A2040 A2055 A2075 200 V single phase AB001 AB002 AB004 AB007 AB015 AB022 AB040 29 M4 M4 M4 M4 M4 M4 M5 M5 M4 M4 M4 M4 M4 M4 5 2 Voltage class 400 V three phase Model W H D W1 H1 H2 d t Mass fig. A4002 108 (4.25) 108 (4.25) 108 (4.25) 108 (4.25) 108 (4.25) 140 (5.51) 140 (5.51) 180 (7.09) 180 (7.09) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 260 (10.24) 260 (10.24) 82 (3.23) 82 (3.23) 82 (3.23) 98 (3.86) 98 (3.86) 78 (3.07) 78 (3.07) 125 (4.92) 125 (4.92) 96 (3.78) 96 (3.78) 96 (3.78) 96 (3.78) 96 (3.78) 128 (5.04) 128 (5.04) 164 (6.46) 164 (6.46) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 244 (9.61) 244 (9.61) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 8 (0.31) 8 (0.31) M4 6 (0.24) 6 (0.24) 6 (0.24) 6 (0.24) 6 (0.24) 6 (0.24) 6 (0.24) 10 (0.39) 10 (0.39) 0.9 (1.98) 3 0.9 (1.98) 3 1.0 (2.20) 3 1.0 (2.20) 3 1.0 (2.20) 3 1.2 (2.65) 4 1.2 (2.65) 4 5.4 (0.21) 5 5.4 (0.21) 5 A4004 A4007 A4015 A4022 A4030 A4040 A4055 A4075 30 M4 M4 M4 M4 M4 M4 M5 M5 31 Fig. 5 32 Table 3 3G3JV Finless Dimensions in mm (inches) / Mass in kg (lb) Voltage class 200 V three phase Model W H D W1 H1 H2 d t Mass A2001 68 (2.68) 68 (2.68) 68 (2.68) 68 (2.68) 108 (4.25) 108 (4.25) 140 (5.51) 68 (2.68) 68 (2.68) 68 (2.68) 108 (4.25) 108 (4.25) 108 (4.25) 108 (4.25) 108 (4.25) 108 (4.25) 108 (4.25) 140 (5.51) 140 (5.51) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 128 (5.04) 65 (2.56) 65 (2.56) 65 (2.56) 65 (2.56) 71 (2.82) 96 (3.78) 96 (3.78) 65 (2.56) 65 (2.56) 75 (2.95) 71 (2.82) 96 (3.78) 71 (2.82) 71 (2.82) 71 (2.82) 96 (3.78) 96 (3.78) 96 (3.78) 96 (3.78) 56 (2.20) 56 (2.20) 56 (2.20) 56 (2.20) 96 (3.78) 96 (3.78) 128 (5.04) 56 (2.20) 56 (2.20) 56 (2.20) 96 (3.78) 96 (3.78) 96 (3.78) 96 (3.78) 96 (3.78) 96 (3.78) 96 (3.78) 128 (5.04) 128 (5.04) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 118 (4.65) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) M4 5 (0.20) 5 (0.20) 5 (0.20) 5 (0.20) 6 (0.24) 6 (0.24) 6 (0.24) 5 (0.20) 5 (0.20) 5 (0.20) 6 (0.24) 6 (0.24) 6 (0.24) 6 (0.24) 6 (0.24) 6 (0.24) 6 (0.24) 6 (0.24) 6 (0.24) 0.5 (1.10) 7 0.5 (1.10) 7 0.6 (1.32) 7 0.6 (1.32) 7 0.8 (1.76) 8 1.0 (2.20) 8 1.2 (2.64) 9 0.5 (1.10) 7 0.5 (1.10) 7 0.7 (1.54) 7 0.9 (1.98) 8 1.0 (2.20) 8 0.9 (1.98) 8 0.9 (1.98) 8 1.0 (2.20) 8 1.0 (2.20) 8 1.0 (2.20) 8 1.2 (2.64) 9 1.2 (2.64) 9 A2002 A2004 A2007 A2015 A2022 A2040 200 V singlephase AB001 AB002 AB004 AB007 AB015 400 V three phase A4002 A4004 A4007 A4015 A4022 A4030 A4040 33 M4 M4 M4 M4 M4 M4 M4 M4 M4 M4 M4 M4 M4 M4 M4 M4 M4 M4 fig. 34 35
Omron Sysdrive 3G3JV Series
Compact Simplified Inverter
User’s Manual
Язык: английский
Формат: PDF
�?нструкция по эксплуатации на частотники Omron серии 3G3JV.
This manual describes the functions of the product and relations with other products. The product contains potentially dangerous parts under the cover. Do not attempt to open the cover under any circumstances. Doing so may result in injury or death and may damage the product. Never attempt to repair or disassemble the product. We recommend that you add the following precautions to any instruction manuals you prepare for the system into which the product is being installed.
Table of Contents:
Chapter 1. Overview
1-1 Function.
1-2 Nomenclature.
Chapter 2. Design
2-1 Installation.
2-1-1 Dimensions
2-1-2 Installation Conditions
2-2 Wiring
2-2-1 Removing and Mounting the Covers
2-2-2 Terminal Block.
2-2-3 Standard Connections
2-2-4 Wiring around the Main Circuit
2-2-5 Wiring Control Circuit Terminals.
2-2-6 Conforming to EC Directive.
Chapter 3. Preparing for Operation and Monitoring.
3-1 Nomenclature.
3-2 Outline of Operation
Chapter 4. Test Run
4-1 Procedure for Test Run
4-2 Operation Example
Chapter 5. Basic Operation
5-1 Initial Settings
5-2 V/f Control.
5-3 Setting the Local/Remote Mode
5-4 Selecting the Operation Command
5-5 Setting the Frequency Reference
5-5-1 Selecting the Frequency Reference
5-5-2 Upper and Lower Frequency Reference Limits
5-5-3 Adjusting the Analog Input
5-5-4 Setting Frequency References through Key Sequences
5-6 Setting the Acceleration/Deceleration Time.
5-7 Selecting the Reverse Rotation-prohibit
5-8 Selecting the Interruption Mode
5-9 Multi-function I/O.
5-9-1 Multi-function Input.
5-9-2 Multi-function Output
5-10 Analog Monitor Output.
Chapter 6. Advanced Operation
6-1 Setting the Carrier Frequency
6-2 DC Injection Braking Function.
6-3 Stall Prevention Function
6-4 Overtorque Detection Function.
6-5 Torque Compensation Function.
6-6 Slip Compensation Function.
6-7 Other Functions.
6-7-1 Motor Protection Characteristics (n33 and n34)
6-7-2 Cooling Fan Operation Function (n35)
6-7-3 Momentary Power Interruption Compensation (n47)
6-7-4 Fault Retry (n48)
6-7-5 Frequency Jump Function (n49 to n51)
6-7-6 Frequency Detection Function.
6-7-7 UP/DOWN Command Frequency Memory (n62)
6-7-8 Error History (n78)
Chapter 7. Communications
7-1 RS-422/485 Communications Unit
7-1-1 Overview
7-1-2 External Dimensions.
7-1-3 Names of Parts
7-1-4 Mounting Procedure.
7-2 Inverter Settings.
7-2-1 Setting the Communications Conditions
7-2-2 Operation Command Selection (n02)
7-2-3 Frequency Reference Input Selection (n03).
7-2-4 Setting the Multi-function Inputs (n36 to n39)
7-3 Message Communications Basic Format
7-4 DSR Message and Response.
7-4-1 Data Read (Function Code: 03 Hex)
7-4-2 Data Write/Broadcast Data Write (Function Code: 10 Hex)
7-4-3 Loop-back Test (Function Code: 08 Hex)
7-5 Enter Command.
7-6 Setting the Communications Data.
7-7 Register Number Allocations in Detail.
7-7-1 I/O Function
7-7-2 Monitor Functions.
7-8 Communications Error Codes
7-9 Self-diagnostic Test
7-10 Communications with Programmable Controller.
7-10-1 Available Programmable Controllers and Peripheral Devices.
7-10-2 Wiring the Communications Line
7-10-3 Outline of Protocol Macro Function.
7-10-4 Creating a Project File
7-10-5 Ladder Program
7-10-6 Communications Response Time.
Chapter 8. Maintenance Operations
8-1 Protective and Diagnostic Functions.
8-1-1 Fault Detection (Fatal Error)
8-1-2 Warning Detection (Nonfatal Error).
8-2 Troubleshooting.
8-2-1 Parameters Fail Set
8-2-2 Motor Fails to Operate
8-2-3 Motor Rotates in the Wrong Direction.
8-2-4 Motor Outputs No Torque or Acceleration is Slow.
8-2-5 Motor Deceleration is Slow
8-2-6 Motor Burns
8-2-7 Controller or AM Radio Receives Noise when Inverter is Started
8-2-8 Ground Fault Interrupter is Actuated when Inverter is Started
8-2-9 Mechanical Vibration
8-2-10 Motor Rotates after Output of Inverter is Turned Off.
8-2-11 Detects OV when Motor Starts and Motor Stalls.
8-2-12 Output Frequency Does Not Reach Frequency Reference
8-2-13 Inverter Does Not Run Because EF (Simultaneous Input of Forward and Reverse Commands) is Detected, or Motor Rotates Momentarily While Control Device Power is OFF.
8-3 Maintenance and Inspection
Chapter 9. Specifications
9-1 Inverter Specifications
9-2 Specifications of Accessories
9-2-1 List of Accessories
9-2-2 Adapter Panel
9-2-3 RS-422/485 Communications Unit
9-2-4 Fan Unit
9-2-5 Scaling Meter
9-2-6 Digital Operator
9-2-7 Digital Operator Case
9-2-8 Digital Operator Connection Cable
9-2-9 DC Reactor
9-2-10 DIN Track Mounting Bracket
9-2-11 AC Reactor
9-3 Option Specifications
9-3-1 EMC-compatible Noise Filter
9-3-2 Simple Input Noise Filter.
9-3-3 Output Noise Filter
Chapter 10. List of Parameters
Chapter 11. Using the Inverter for a Motor.
Revision History.
ВН�?МАН�?Е!
Вся информация, которая размещается на сайте носит ознакомительный характер. Мы стремимся к тому, чтобы Вы получали только достоверную, максимально полную и точную информацию. Но мы не исключаем, что некоторая информация может со временем утратить свою актуальность, допускаем возможность ошибок в содержании.
�?нформация на сайте размещается в исходном виде. Мы не даем гарантии на полноту и актуальность информации. �?нформация предоставляется также без каких-либо других явно или неявно выраженных или предполагаемых гарантий.
Администрация сайта не несет ответственности за информацию, предоставленную пользователями. Администрация сайта оставляет за собой право, не уведомляя пользователей и посетителей ресурса, вносить изменения в контент.
На сайте есть ссылки на сторонние ресурсы (сайты), на которые мы не имеем никакого влияния. Ссылки на другие ресурсы предназначены для того, чтобы пользователю было удобнее искать информацию по схожей тематике. Мы не несем ответственности за содержание других сайтов (контент), за их доступность пользователям.
Нет и не может быть таких обстоятельств, при которых владелец (администрация) сайта будет нести какую-либо ответственность перед какой-либо стороной за прямой, непрямой или косвенно причиненный ущерб из-за использования информации, находящейся на страницах этого сайта, или информации на том сайте, на который имеется гиперссылка с этого ресурса. Ни при каких обстоятельствах мы не будем нести ответственность за возможную, но упущенную выгоду, потерю программ или данных, приостановку вашей хозяйственной деятельности и в аналогичных случаях, даже если будем явно проинформированы о большой вероятности подобного ущерба.
�?нтернет не обеспечивает надежной защиты данных и информации, поэтому не несет и не может нести ответственность за информацию, которую получают пользователи из �?нтернета.
Посещая данный сайт и используя его контент в своих целях, Вы прямо выражаете свое согласие с данным «Отказом от ответственности» и принимаете всю ответственность на себя.
Администрация сайта в любое время может и имеет право вносить изменения в эти правила. Они вступают в силу безотлагательно с этого момента. Если Вы продолжаете пользоваться сайтом после того, как в «Отказ от ответственности» внесены изменения, значит — Вы автоматически согласились на соблюдение обновленных правил.
Владельцы и создатели данного ресурса не несут ответственности за содержание ссылок, за их использование и за информацию, размещенную на данном сайте, как не несут ответственность за игнорирование пользователями коммерческого статуса того программного обеспечения, на которое ведут ссылки с этого сайта.
Авторское право и право на товарный знак
Мы стремимся соблюдать авторские права других собственников и использовать собственные или не требующие лицензирования материалы. Загрузка и копирование текстовых материалов, изображений, фотографий или иных файлов с нашего сайта допускается только для личного, некоммерческого использования. Поскольку содержимое этого раздела сайта создается из открытых общедоступных и бесплатных источников. Если вам стало известно об авторском праве на какой-либо материал на сайте, пожалуйста, сообщите нам. После уведомления о нарушениях, мы удалим такое содержимое немедленно.
-
Page 1
Cat. No. I011-E1-3 USER’S MANUAL SYSDRIVE 3G3EV (Standard Models) Compact Low-noise Inverter… -
Page 2
Thank you for choosing this SYSDRIVE 3G3EV-series product. Proper use and handling of the product will ensure proper product performance, will length product life, and may prevent possible accidents. Please read this manual thoroughly and handle and operate the product with care. -
Page 3: Table Of Contents
Table of Contents Chapter 1. Getting Started ……Items to be Checked when Unpacking ……Precautions .
-
Page 4
Table of Contents Chapter 5. Operation ……Protective and Diagnostic Functions . -
Page 5: Chapter 1. Getting Started
Chapter 1 Getting Started 1-1 Items to be Checked when Unpacking 1-2 Precautions…
-
Page 6: Items To Be Checked When Unpacking
1-1 Items to be Checked when Unpacking H Checking the Product On delivery, always check that the delivered product is the SYSDRIVE 3G3EV Inverter that you ordered. Should you find any problems with the product, immediately contact your nearest local sales representative.
-
Page 7: Precautions
Chapter 1 Getting Started Voltage Class Special Specification Three-phase 200-VAC input English Models Single/Three-phase 200-VAC -CUE UL/CUL and EC Directives input Models Blank Japanese Models Installation Type/Option Panel mounting Option D Checking for Damage Check the overall appearance and check for damage or scratches resulting from trans- portation.
-
Page 8
Chapter 1 Getting Started If an inspection or some other task is to be performed, always wait at least one minute from the time all indicators on the front panel go off. (Note that this warning is applicable whenever you perform any task after turning the main circuit off.) H Do Not Remove the Digital Operator When the Main Circuit is Still On. -
Page 9: Chapter 2. Overview
Chapter 2 Overview 2-1 Features 2-2 Component Names…
-
Page 10: Features
Chapter 2 Overview 2-1 Features H Easy to Use D Basic Constants Displayed On Indicators Constants for basic operations such as frequency setting and acceleration/deceleration time setting are displayed on dedicated indicators. Therefore, constant numbers can be confirmed easily. D Minimum Constant Setting Items Constant setting items have been minimized to enable even first-time users to set constants easily.
-
Page 11
Chapter 2 Overview H Easy to Wire D Easy Wiring without Having to Open the Front Cover This Inverter can be wired just by opening the terminal block cover. D Separate Input and Output Terminal Blocks Power input terminals are located in the upper section, while motor output terminals are in the lower section. -
Page 12: Component Names
Chapter 2 Overview 2-2 Component Names H Main Unit Main Circuit Terminals (Input) Power input Braking resistor terminals connection terminals L1 N/L2 L3 Run indicator Digital Operator Alarm indicator Control circuit terminals Control circuit (output) terminals (input) SF SR S1 SC FS FR FC Ground terminal Motor output terminals…
-
Page 13: Digital Operator
Chapter 2 Overview H Digital Operator Data display section Monitor item indicators In-service item indicators (green indicators) Display These items can be monitored or set even section during operation. Stopped item indicators (red indicators) These items can be set only when the Inverter is stopped.
-
Page 14: Chapter 3. Design
Chapter 3 Design 3-1 Installation 3-2 Wiring…
-
Page 15: Installation
Chapter 3 Design 3-1 Installation 3-1-1 Outside/Mounting Dimensions Note All dimensions are in millimeters. H 3G3EV-A2001(-j) to 3G3EV-A2004(-j) (0.1 to 0.4 kW): Three-phase 200-VAC Input H 3G3EV-AB001(-j) to 3G3EV-AB002(-j) (0.1 to 0.2 kW): Single/Three-phase 200-VAC Input 4.5 dia. Note 1. For the 3G3EV-A2001(-j), 3G3EV-A2002(-j), and 3G3EV-AB001(-j), a U- shaped notch (4.5 mm wide) is provided instead of the upper mounting hole (4.5 mm in diameter).
-
Page 16
Chapter 3 Design D Three-phase 200-VAC Input Model 3G3EV Output Weight model (kg) A2001(-j) 0.1 kW Approx. A2002(-j) 0.2 kW Approx. A2004(-j) 0.4 kW Approx. D Single/Three-phase 200-VAC Input Model 3G3EV Output Weight model (kg) AB001(-j) 0.1 kW Approx. AB002(-j) 0.2 kW Approx. -
Page 17: Installation Conditions
Chapter 3 Design Note Install the Inverter with four M4 bolts. D Three-phase 200-VAC Input Model 3G3EV Output Weight (kg) model A2007(-j) 0.75 kW Approx. 1.3 A2015(-j) 1.5 kW Approx. 1.5 D Single/Three-phase 200-VAC Input Model 3G3EV Output Weight model (kg) 0.4 kW Approx.
-
Page 18
Chapter 3 Design •Install the Inverter in a clean location free from oil mist and dust. Alternatively, install it in a totally enclosed panel that is completely shielded from suspended dust. •When installing or operating the Inverter, always take special care so that metal pow- der, oil, water, or other foreign matter do not get in the Inverter. -
Page 19: Wiring
Chapter 3 Design 3-2 Wiring 3-2-1 Terminal Blocks H Name of Each Terminal Block Main Circuit Terminals (Input) Power input Braking resistor terminals connection terminals Control circuit terminals (output) Control circuit terminals (input) SF SR S1 SC FS FR FC Ground Main circuit terminals terminal…
-
Page 20: Main Circuit Terminals
Chapter 3 Design H Main Circuit Terminals D Input Terminals (Top Section) Terminal Name and description symbol R (L1) Power input terminals A2j: Three-phase 200 to 230 VAC, 50/60 Hz A2j: Three-phase 200 to 230 VAC, 50/60 Hz S (L2/N) ABj: Single-phase 200 to 240 VAC, 50/60 Hz Three-phase 200 to 230 VAC, 50/60 Hz A4j: Three-phase 380 to 460 VAC, 50/60 Hz…
-
Page 21: Control Circuit Terminals
Chapter 3 Design H Control Circuit Terminals D Input Terminals (On Right-hand Side) No external power supply is required because a built-in power supply is provided. Terminal Name and description Interface symbol Forward/Stop When the terminal is ON, the motor rotates in the forward direction.
-
Page 22: Standard Connection Diagram
Chapter 3 Design D Output Terminals (On Left-hand Side) Terminal Name and description Interface symbol Multi-function contact output (contact a) (see note) Multi-function contact output (contact b) 30 VDC (see note) 250 VAC Multi-function contact output (common) Note Constant No. 09 (n09) is used to set the function. This constant is factory set to “operation in progress.”…
-
Page 23: Wiring Around The Main Circuit
Chapter 3 Design Note 1. If a 3G3EV-ABjjj is used in single-phase input mode, single-phase 200 to 240 VAC power with a frequency of 50/60 Hz must be input between terminals R and S. Note 2. For the 3-wire sequence, refer to the wiring on page 4-12. Note 3.
-
Page 24
Chapter 3 Design Determining the Wire Size Determine the wire size for the main circuit so that line voltage drop is within 2% of the rated voltage. Line voltage drop V is calculated as follows: –3 (V) = 3 x wire resistance (Ω/km) x wire length (m) x amperage (A) x 10 H Wiring on the Input Side of Main Circuit D Installing a Molded-case Circuit Breaker Always connect the power input terminals (R, S, and T) and power supply via a molded-… -
Page 25
Chapter 3 Design D Installing an AC Reactor If the Inverter is connected to a large-capacity power transformer (600 kW or more) or the phase advance capacitor is switched, an excessive peak current may flow through the input power circuit, causing the converter unit to break down. To prevent this, install an optional AC reactor on the input side of the Inverter. -
Page 26
Chapter 3 Design D Installing a Noise Filter on the Power Supply Side Install a noise filter to eliminate noise transmitted between the power line and the Inverter. Wiring Example 1 Power 3G3IV-PHF 3G3EV supply Noise filter SYSMAC, etc. Other controllers Note Use a special-purpose noise filter for Inverters. -
Page 27
Chapter 3 Design D Never Connect Power Supply to Output Terminals Caution Never connect a power supply to output terminals U, V, and W. If voltage is applied to the output terminals, the internal mechanism of the Inverter will be damaged. D Never Short or Ground the Output Terminals Caution If the output terminals are touched with bare hands or the output wires come into contact with the Inverter casing, an electric shock or grounding will occur. -
Page 28
Chapter 3 Design Induction Noise: Electromagnetic induction generates noise on the signal line, causing the controller to malfunction. Radio Noise: Electromagnetic waves from the Inverter and cables cause the broadcasting radio receiver to make noise. D How to Prevent Induction Noise As described above, a noise filter can be used to prevent induction noise from being generated on the output side. -
Page 29: Ground Wiring
Chapter 3 Design D Cable Length between Inverter and Motor If the cable between the Inverter and the motor is long, the high-frequency leakage cur- rent will increase, causing the Inverter output current to increase as well. This may affect peripheral devices.
-
Page 30: Wiring Control Circuit Terminals
Chapter 3 Design 3-2-3 Wiring Control Circuit Terminals The control signal line must be 50 m or less and must be separated from the power line. If frequency references are input externally, use a twisted- pair shielded line. H Wiring Sequence Input/Output Terminals Wire the sequence input terminals (SF, SR, S1, and SC) and the multi-function contact output terminals (MA, MB, and MC) as described below.
-
Page 31
Chapter 3 Design D Wires to be Used Always use twisted-pair shielded wires to prevent malfunctions due to noise. Wire type Wire size Wire to be used Single wire 0.5 to 1.25 mm Polyethylene-insulated cable for instrumentation (with shield) Stranded wire 0.5 to 1.25 mm D Wiring Method •The wiring procedure is the same as for sequence input/output terminals, described… -
Page 32: Chapter 4. Preparing For Operation
Chapter 4 Preparing for Operation 4-1 Preparation Procedure 4-2 Using the Digital Operator 4-3 Test Run…
-
Page 33: Preparation Procedure
Chapter 4 Preparing for Operation 4-1 Preparation Procedure 1. Installation: Install the Inverter according to installation conditions. Refer to page 3-2 Check that all the installation conditions are met. 2. Wiring: Connect the Inverter to power supply and peripheral devices. Refer to page 3-6 Select peripheral devices that meet the specifications, and wire them correctly.
-
Page 34: Using The Digital Operator
Chapter 4 Preparing for Operation 6. Test Run: Perform a no-load test run and an actual loading test run to check that the motor and peripheral devices operate normally. Refer to page 4-25 Check the direction of motor rotation and check that the limit switches operate nor- mally.
-
Page 35
Chapter 4 Preparing for Operation H Function of Each Component D Display Sections Data display section Reference frequency values, output frequency values, output current values, constant settings, and error codes are displayed. Monitor item indicators When this indicator is lit, an output frequency value (Hz) is displayed in the data display section. -
Page 36: Outline Of Operation
Chapter 4 Preparing for Operation 4-2-2 Outline of Operation H Switching Data Display during Operation Press the Mode Key to switch data display. During operation, only the items in the in-service item indicators section can be monitored and the constants for these items can be set. If the power is turned off when the FOUT or IOUT indicator is lit, the same indicator lights up next time the power is turned on.
-
Page 37
Chapter 4 Preparing for Operation H Switching Data Display when Inverter is Stopped Press the Mode Key to switch data display. When the Inverter is stopped, all items can be monitored and the constant for each item can be set. Example Indi- Description… -
Page 38
Chapter 4 Preparing for Operation H Monitor Display The 3G3EV allows the user to monitor the reference frequency, output fre- quency, output current, and the direction of rotation. D Operation Method Indicator Example of Description operation data display 60.0 Press the Mode Key until the FREF indicator lights up. -
Page 39: Setting Constants
Chapter 4 Preparing for Operation 4-2-3 Setting Constants The 3G3EV (Standard Model) allows the user to set 18 different constants. The constants for basic operations are allocated to dedicated indicators, so the user need not refer to the constant nos. The constants allocated to dedicated indicators can be also set by lighting the PRGM indicator.
-
Page 40
Chapter 4 Preparing for Operation D Setting Constants Using the PRGM Indicator Example: Changing the value of constant no. 02 (operation mode selection) to “2.” Indicator Example of Explanation operation data display Press the Mode Key until the PRGM indicator lights up. -
Page 41
Chapter 4 Preparing for Operation H List of Constants Constant Dedicated Description Setting range Factory setting indicator Constant write-inhibit selec- 0, 1, 8, 9 tion/constant initialization Operation mode selection 0 to 5 Interruption mode selection 0, 1 Forward/reverse rotation For, rEv selection Multi-function input selec- 0 to 4… -
Page 42
Chapter 4 Preparing for Operation Note 3. The setting range for the 400-VAC models is “1 to 5.” Note 4. The factory setting for the 3G3EV-A4015-CUE is “3.” Note 5. Displaying the constant no. corresponding to an indicator in the “Dedicated indicator”… -
Page 43
Chapter 4 Preparing for Operation Example of 3-wire Sequence Mode Stop switch switch (contact b) (contact a) Run command (starts Inverter when “closed”) Stop command (stops Inverter when “opened”) Forward/Reverse rotation command (rotates motor in forward direction when “opened”; rotates motor in reverse direction when “closed”) Common Example of Operation Forward rotation… -
Page 44
Chapter 4 Preparing for Operation Note 2. The DIP switch is located inside the Inverter. Use this switch to change the set- ting when frequency references are to be input in terms of amperage (4 to 20 mA). For details, refer to Section 7-2 Frequency Reference by Amperage Input. For voltage input, never set the DIP switch to ON. -
Page 45
Chapter 4 Preparing for Operation Forward/Reverse Rotation Selection f%r , reU Factory setting f%r Setting range (forward rota- tion) This constant is used to specify the direction of motor rotation when the Inverter is oper- ated with the Digital Operator. Value Description Forward rotation… -
Page 46
Chapter 4 Preparing for Operation Note MA is turned on when the difference between the reference frequency and the output frequency falls within 2 Hz. MA is turned off when the difference exceeds ±4 Hz. Example of Operation Reference frequency Detection range ±2 Hz Release range… -
Page 47
Chapter 4 Preparing for Operation Frequency Reference 1 Setting range 0.0 to 400 (Hz) Factory setting 6.0 (Hz) Frequency Reference 2 Setting range 0.0 to 400 (Hz) Factory setting 0.0 (Hz) •These constants are used to set reference frequency values. •The unit of setting is as follows: 0.0 to 99.9 (Hz): 0.1 (Hz) 100 to 400 (Hz): 1 (Hz) -
Page 48
Chapter 4 Preparing for Operation Acceleration Time Setting range 0.0 to 999 Factory setting 10.0 (seconds) (seconds) Deceleration time Setting range 0.0 to 999 Factory setting 10.0 (seconds) (seconds) •These constants are used to set acceleration time (required to increase the output fre- quency from the stopped state to the maximum frequency) and deceleration time (re- quired to decrease the output frequency from the maximum frequency to the stopped state). -
Page 49
Chapter 4 Preparing for Operation Maximum Frequency Setting range 50.0 to 400 Factory setting 60.0 (Hz) (Hz) Unit of setting 50.0 to 99.9 (Hz) : 0.1 (Hz) 100 to 400 (Hz) : 1 (Hz) Maximum Voltage Setting range 1 to 255 (510) Factory setting 200 (400) (V) Unit of setting 1 (V) Maximum Voltage Frequency (Basic Frequency) -
Page 50
Chapter 4 Preparing for Operation Electronic Thermal Reference Current Setting range 0.0 to Factory setting See note 2 (see note 1) (A) Unit of setting 0.1 (A) •This constant is used to set an electronic thermal reference value to protect the motor from overheating. -
Page 51
Chapter 4 Preparing for Operation Operation after Recovery from Power Interruption Setting range 0, 1, 2 Factory setting 0 This constant is used to select the processing to be performed after recovery from an instantaneous power interruption. Value Description Discontinues operation. Continues operation only if power interruption is within 0.5 second. -
Page 52
Chapter 4 Preparing for Operation Note 2. The factory setting for the 3G3EV-A4015-CUE is “3.” Note 3. With the 400-VAC class, the continuous output current cannot be used to 100% of the rated value if the constant is set to “5” for Inverters of 0.75 kW or less or if it is set to “4”… -
Page 53
Chapter 4 Preparing for Operation Frequency Reference Gain Setting range 0.10 to 2.55 Factory setting 1.00 (times) (times) Unit of setting 0.01 (times) Frequency Reference Bias Setting range –99 to 99 (%) Factory setting 0 (%) Unit of setting 1 (%) •These constants are used to set the relationship between analog voltage and refer- ence frequencies when frequency references are input through control terminals FR and FC. -
Page 54
Chapter 4 Preparing for Operation Stop Key Selection Setting range 0, 1 Factory setting 0 •When inputting Inverter operation from the control terminals, the Stop Key on the Digi- tal Operator can be set to “enabled” or “disabled.” Value Description Stop Key enabled Stop Key disabled Note 1. -
Page 55
Chapter 4 Preparing for Operation •Recorded are Inverter errors and other errors that actuate a protective mechanism. Warning (automatically recovered error) is not recorded. •If no error has occurred, the indicator is not lit. •All error codes are listed below. Error code Description Error category… -
Page 56: Test Run
Chapter 4 Preparing for Operation 4-3 Test Run After wiring is complete, perform a test run of the Inverter as follows. First, start the motor through the Digital Operator without connecting the motor to the mechanical system. Next, connect the motor to the mechanical sys- tem and perform a test run.
-
Page 57: Setting Rated Motor Amperage
Chapter 4 Preparing for Operation 4-3-5 Setting Rated Motor Amperage •Set the rated motor amperage in constant no. 31 (electronic thermal reference current) or with the “THR” indicator lit. 4-3-6 Setting the Reference Frequency •Set the frequency corresponding to the motor speed in constant no. 11 (frequency ref- erence 1) or with the “FREF”…
-
Page 58: Chapter 5. Operation
Chapter 5 Operation 5-1 Protective and Diagnostic Functions 5-2 Troubleshooting 5-3 Maintenance and Inspection…
-
Page 59: Protective And Diagnostic Functions
Chapter 5 Operation 5-1 Protective and Diagnostic Functions The 3G3EV has excellent protective and diagnostic functions. The RUN and ALARM indicators on the front panel indicate the current Inverter sta- tus, and the data display section also displays information about an error that has occurred.
-
Page 60
Chapter 5 Operation H Data Display and Action to be Taken when Warning Status Arises The ALARM indicator flashes when warning status arises. The data display section also flashes. When warning status arises, no error code is output. Eliminating the cause recovers the system automatically. Data Description Action… -
Page 61
Chapter 5 Operation H Data Display and Action to be Taken when Protective Mechanism is Actuated The ALARM indicator lights up when the protective mechanism is actuated. In this event, Inverter output is shut off, and the motor coasts to a stop. Check the cause of the error, take the necessary action, and perform fault reset or turn the power off, then on. -
Page 62
Chapter 5 Operation Data Description Cause and action display • The input power voltage dropped. Main circuit undervoltage (UV1) • Open-phase occurred. The DC voltage of the main circuit dropped below the specified level. • An instantaneous power interruption 3G3EV-A2jjj: Approximately 200 V occurred. -
Page 63
Chapter 5 Operation Data Description Cause and action display • Review the load size, V/f characteris- Motor overload (OL1) tics, acceleration/deceleration time, The electronic thermal relay actuated and cycle time. the motor overload protection function. • Set the rated motor amperage in constant No. -
Page 64
Chapter 5 Operation H Data Display and Action to be Taken when Inverter Error Occurs The first character of an error code is always “F” when an Inverter error occurs. (Howev- er, all indicators are not lit when a control circuit error occurs.) If an Inverter error occurs, turn the power off, then on. -
Page 65: Troubleshooting
Chapter 5 Operation 5-2 Troubleshooting If the Inverter or motor does not operate properly when the system is started, constant settings or wiring may be incorrect. In this case, take the appropriate action as described below. (If an error code is displayed, refer to 5-1 Protective and Diagnostic Functions.) 5-2-1 Constants Fail to Set H err is Displayed in the Data Display Section.
-
Page 66: Motor Rotates In The Wrong Direction
Chapter 5 Operation •The reference frequency is too low. When the reference frequency is less than 1.5 Hz, the Inverter cannot operate. Change the reference frequency to 1.5 Hz or more. •The sequence input method is wrong. If the 3-wire sequence input mode is selected as an external terminal function instead of the actual 2-wire sequence input mode, the motor will not run, in which case change the constant or change to the sequence input that matches the constant setting.
-
Page 67: Motor Deceleration Is Too Slow
Chapter 5 Operation To reverse the direction of rotation, switch the wires of two phases of U, V, and W as shown below. Inverter Motor Forward rotation Reverse rotation 5-2-4 Motor Deceleration is Too Slow H Deceleration Time is Too Long Even if a Braking Resistor is Connected.
-
Page 68: Motor Burns
Chapter 5 Operation 5-2-6 Motor Burns •The dielectric strength of the motor is insufficient. Surge arises when the motor (inductive load) is connected to the output side of the Inverter. Normally, the maximum surge voltage is approximately three times the power voltage.
-
Page 69: Mechanical System Makes Noise
Chapter 5 Operation S Install an input noise filter. Install an input noise filter (3G3IV-PHF) on the power input side of the Inverter. S Install an output noise filter. Install an output noise filter (3G3IV-PLF) on the output side of the Inverter. S Use metal box and piping.
-
Page 70: Maintenance And Inspection
Chapter 5 Operation Under the wiring condition shown below, if the control output power supply is lower than 24 VDC or if it is set to OFF, current may flow in the direction shown by the arrows and may operate the Inverter input. In such a case, insert a diode in the A section shown below.
-
Page 71
Chapter 5 Operation H Regular Maintenance Check the items below during regular maintenance. Before starting inspection, always turn the power off, then wait at least one minute after all indicators on the front panel go off. Touching terminals immediately after turning the power off may cause an electrical shock. -
Page 72: Chapter 6. Specifications
Chapter 6 Specifications 6-1 Specifications of Main Unit…
-
Page 73
Chapter 6 Specifications 6-1 Specifications of Main Unit H Rating Model 3G3EV- A2001(-j) A2002(-j) A2004(-j) A2007(-j) A2015(-j) Three phase, Power Rated voltage Three-phase, 200 to 230 VAC, 50/60 Hz 200 VAC supply and frequency Allowable –15% to 10 % voltage fluctuation ±5% Allowable… -
Page 74: General Specifications
Chapter 6 Specifications Model 3G3EV- Three A4002(-j) A4004(-j) A4007(-j) A4015(-j) phase, Power Rated voltage Three-phase, 380 to 460 VAC, 50/60 Hz 400 VAC supply and frequency Allowable –15% to 10 % voltage fluctuation ±5% Allowable frequency fluctuation Heating value (W) 25.5 34.7 56.0…
-
Page 75
Chapter 6 Specifications H Control Characteristics Control method Sine-wave PWM method (automatic torque boost) Frequency control 1.5 to 400 Hz range Frequency accuracy Digital command: ±0.01% (–10°C to 50°C) (temperature fluctuation) Analog command: ±1% (25 ±10°C) Frequency setting Digital command: resolution 0.1 Hz (less than 100 Hz), 1 Hz (100 Hz or more) Analog command:… -
Page 76: Protection Functions
Chapter 6 Specifications H Protection Functions Motor protection Electronic thermal protection Instantaneous When 250% of the rated output amperage is exceeded overcurrent protection Overload protection When 150% of the rated output amperage is exceeded for one minute Overvoltage protection Stops the system when DC voltage of the main circuit exceeds approximately 410 V (400-VAC Class approximately 820 V) Voltage drop protection 3G3EV-A2jjj: Stops the system when voltage drops below approximately 200 V…
-
Page 77
Chapter 6 Specifications H Operation Specifications Three photocoupler input terminals (24 VDC, 8 mA) Control input • Forward/stop [SF] • Reverse/stop [SR] • Multi-function input [S1] (set in constant No. 06) Select either of “fault reset,” “external fault,” and “multi-step speed command.”… -
Page 78: Chapter 7. Appendix A
Chapter 7 Appendix A 7-1 Notes on Using Inverter for Motor 7-2 Frequency Reference by Amperage Input 7-3 List of Product Models…
-
Page 79: Notes On Using Inverter For Motor
Chapter 7 Appendix A 7-1 Notes on Using Inverter for Motor H Using Inverter for Existing Standard Motor When a standard motor is operated with this Inverter, a power loss is slightly higher than when operated with a commercial power supply. In addition, cooling effects also decline in the low-speed range, resulting in an increase in the motor temperature.
-
Page 80
Chapter 7 Appendix A D Vibration The 3G3EV series employs high carrier PWM control to reduce motor vibration. When the motor is operated with this Inverter, motor vibration is almost the same as when op- erated with a commercial power supply. However, motor vibration may become greater in the following cases: •Resonance with the natural frequency of mechanical system Take special care when a machine that has been operated at a constant speed is to… -
Page 81: Frequency Reference By Amperage Input
Chapter 7 Appendix A D Gearmotor The speed range for continuous operation differs according to the lubrication method and motor manufacturer. In particular, continuous operation of an oil-lubricated motor in the low speed range may result in burning. If the motor is to be operated at a speed high- er than 60 Hz, consult with the manufacturer.
-
Page 82
Chapter 7 Appendix A 3. Removing the Digital Operator S Insert a finger in the recessed section below the Digital Operator, then lift the under- neath of the Digital Operator. S When the connector comes off, grip the lower edges of the Digital Operator, and slide it down until it comes off. -
Page 83
Chapter 7 Appendix A “SW1” is marked near the switch. Switch indicator V: Voltage input I: Amperage input DIP switch 5. Changing the DIP switch setting To use amperage input mode, set this switch to ON by sliding it to the right. (factory setting) 6. -
Page 84: List Of Product Models
Chapter 7 Appendix A 7-3 List of Product Models H Inverter Specifications Model Standard Three-phase 200 VAC input 0.1 kW 3G3EV-A2001(-j) models 0.2 kW 3G3EV-A2002(-j) 0.4 kW 3G3EV-A2004(-j) 0.75 kW 3G3EV-A2007(-j) 1.5 kW 3G3EV-A2015(-j) Single/Three-phase 200 VAC input 0.1 kW 3G3EV-AB001(-j) 0.2 kW 3G3EV-AB002(-j)
-
Page 85: Output Noise Filter
Chapter 7 Appendix A H Braking Resistor (Duty Cycle 3% ED) Specifications Model 400 Ω 200-VAC class 0.1 kW/0.2 kW 3G3IV-PERF150WJ401 200 Ω 0.4 kW/0.75 kW 3G3IV-PERF150WJ201 100 Ω 1.5 kW 3G3IV-PERF150WJ101 750 Ω 400-VAC class 0.75 kW or less 3G3IV-PERF150WJ751 400 Ω…
-
Page 86
Chapter 7 Appendix A H DIN Track Specifications Model 3G3EV-A2001(-j) to 3G3EV-A2004(-j) 3G3EV-PSPAT3 3G3EV-AB001(-j) and 3G3EV-AB002(-j) 3G3EV-A2007(-j) to 3G3EV-A2015(-j) 3G3EV-PSPAT4 3G3EV-AB004(-j) and 3G3EV-AB007(-j) 3G3EV-A4002(-j) to 3G3EV-A4007(-j) -
Page 87
Chapter 7 Appendix A List of Constants Used with 3G3EV Standard Model Constant Indi- Description Setting range Setting cators Constant 0: Only n01 can be set. write-inhibit 1: All constants can be set. selection 8: Constant settings are initialized. /constant 9: Inverter is initialized in 3-wire initialization sequence mode. -
Page 88
Chapter 7 Appendix A Constant Indi- Description Setting range Setting cators Deceleration 0.0 to 999 (seconds) [10.0] time Maximum 50.0 to 400 (Hz) [60.0] frequency Maximum 1 to 255 (V) (see note 1) [200] voltage Maximum 1.6 to 400 (Hz) [60.0] voltage frequency (basic…
![]()
Simple, Compact Inverters
 3G3JVSeries
3G3JVSeries
Note: Do not use this document to operate the Unit.
|
OMRON Corporation |
Regional Headquarters |
|
FA Systems Division H.Q. |
OMRON EUROPE B.V. |
|
66 Matsumoto |
Wegalaan 67-69, NL-2132 JD Hoofddorp |
|
Mishima-city, Shizuoka 411-8511 |
The Netherlands |
|
Japan |
Tel:(31)2356-81-300/Fax:(31)2356-81-388 |
|
Tel:(81)55-977-9181 |
OMRON ELECTRONICS LLC |
|
Fax:(81)55-977-9045 |
1 East Commerce Drive, Schaumburg, IL 60173 U.S.A. |
|
Tel:(1)847-843-7900/Fax:(1)847-843-8568 |
|
|
OMRON IDM Controls |
|
|
9510 North Houston, Tx. 77088 U.S.A. |
|
|
Tel: (1)800-395-4106/Fax: (1)713-849-4666 |
|
|
OMRON ASIA PACIFIC PTE. LTD. |
|
|
83 Clemenceau Avenue, #11-01, UE Square, |
|
|
Singapore 239920 |
|
|
Tel:(65)6835-3011/Fax:(65)6835-2711 |
Authorized Distributor:
|
Note: Specifications subject to change without notice. |
Cat.No.I905-E1-05 |
|
Printed in Japan |
|
|
0204-1M |

There has been a great demand for inverters that provide easier motor speed control. OMRON’s simple, compact 3G3JV Series meets the demand.
The 3G3JV Inverters provide versatile functions and ensure powerful performance. The front panel of the 3G3JV Inverter has a frequency adjuster that makes it possible to start the motor and easily control the motor speed.
The 3G3JV Inverters are easy to mount and operate and support a wide range of applications for efficient motor control.
Actual
Size
Three-phase 100 W at 200 V 68 x 128 x 78.5 mm (W x H x D)
The frequency adjuster on the front panel makes it possible to easily adjust the speed of the motor.
The Inverter can be operated immediately after the power is turned ON.
The 3G3JV Inverter performs versatile speed control, such as multi-step speed control up to a maximum of nine steps, acceleration and deceleration (UP/DOWN) control, and jog operations. Furthermore, the 3G3JV Inverter provides a variety of useful functions, including slip compensation, overtorque detection, and speed search functions.
The cooling fan can be easily mounted or dismounted. The cooling fan can also be turned on only when the 3G3JV Inverter is in operation, prolonging the life of the fan.
The 3G3JV Inverters are compact and space-saving to mount easily into a panel.
C o n t e n t s
|
Features |
2 |
|
Applications |
4 |
|
Nomenclature |
6 |
|
Using Digital Operator |
8 |
|
List of Parameters |
11 |
|
Function of Each Parameter |
14 |
|
Specifications |
22 |
|
Dimensions |
27 |
|
Standard Connections |
28 |
|
Protective and Diagnostic Functions |
29 |
|
Options |
34 |
|
Inverter Models |
47 |
This catalog provides information for the selection of models, but does not provide operational precautions. For information on the operation of the 3G3JV Inverters and operational precautions, be sure to read the operation manual.
The 3G3JV Inverter incorporates main circuit terminals arranged in two rows on the top and bottom of the housing, making it possible to
mount the 3G3JV Inverter like a contactor. The optional DIN Track Mounting Bracket makes it possible to easily mount a 3G3JV Inverter to a DIN track.
The 3G3JV Inverter supports a variety of I/O, such as analog inputs between 0 and 10V, 4 to 20 mA, or 0 to 20 mA, multifunction I/O, and analog monitor outputs. Multi-function inputs can set to either PNP or NPN, providing flexibility in input signals.
Standard models meet CE and UL/cUL standards.
C

Conventionalti l Systemst
 Relay contact welding occurs, which may put the system and operators in danger. Furthermore, the life of the system is comparatively short.
Relay contact welding occurs, which may put the system and operators in danger. Furthermore, the life of the system is comparatively short.
 The system employs a gearbox for
The system employs a gearbox for
speed control, the designing and Breaker adjustment of which require time and
labor.
|
To ensure the safety of the system, the |
||||||||
|
system needs peripheral safety |
Open-phase |
|||||||
|
devices, the wiring of which requires |
detection |
|||||||
|
time and labor. |
||||||||
|
The motor always rotates at top speed, |
||||||||
|
consuming a high amount of power. |
||||||||
|
A strong shock is produced when the |
||||||||
|
motor is driven, which may cause |
||||||||
|
loads to shift, deteriorate the quality of |
||||||||
|
products, or put the system and |
||||||||
|
operators in danger. |
Contactor |
|||||||
|
Three-phase |
||||||||
|
inductive |
||||||||
|
motor |
||||||||
|
Current leakage |
||||||||
|
Gear box |
Starter |
detection |
||||||
3G3JV InverterI t Solutionsl ti
 A 3G3JV Inverter has no mechanical relay contacts
A 3G3JV Inverter has no mechanical relay contacts
long-life system  A 3G3JV Inverter speed control, control for up
A 3G3JV Inverter speed control, control for up
and deceleration and jog operations
 A 3G3JV Inverter protective
A 3G3JV Inverter protective
speed current protection, and
 A 3G3JV Inverter flexible speeds range of the
A 3G3JV Inverter flexible speeds range of the
power consumption  A 3G3JV Inverter soft-stop functions, from shifting quality, while system.
A 3G3JV Inverter soft-stop functions, from shifting quality, while system.
Three-phase inductive motor
|
Conventionalti l Systemst |
3G3JV InverterI t Solutionsl ti |
|||||
|
A |
A 3G3JV |
|||||
|
the |
soft-stop |
|||||
|
load |
from shifting |
|||||
|
product quality |
||||||
|
of the system |
||||||
|
The |
The 3G3JV |
|||||
|
a maximum |
||||||
|
motor |
Breaker |
and ensure |
||||
|
used |
torque in the |
Breaker |
||||
|
The |
A three-phase |
|||||
|
fluctuation |
||||||
|
by |
phase motor, |
|||||
|
The |
operation of |
|||||
|
limited |
A 3G3JV |
|||||
|
contact outputs |
||||||
|
controller, such |
||||||
|
Controller. |
3G3JV |
|||||
|
A wide range |
||||||
|
Inverter |
||||||
|
Three-phase |
||||||
|
inductive motor |
||||||
|
Gear box |
Speed controller |
|||||
A 3G3JV Inverter provides soft-start and soft-stop functions to prevent loads from shifting. Furthermore, a 3G3JV Inverter performs flexible speed control of the conveyor up to nine steps.
A 3G3JV Inverter provides optimum control of fan speed according to the room temperature. The 3G3JV Inverter has no mechanical relay contacts, ensuring the safety and reliability of the system compared with the ON/OFF control of contactors. Optimum control of fan speed also saves energy.
A 3G3JV Inverter performs flexible speed control of a compact agitator or separator.
A 3G3JV Inverter provides multi-step speed control to open and close an electric shutter safely and efficiently. The shutter opens quickly at a high speed, but closes at a medium-range speed while the system checks the safety of the operation and decelerates to low speed before it is fully closed to prevent people from being caught by the shutter.
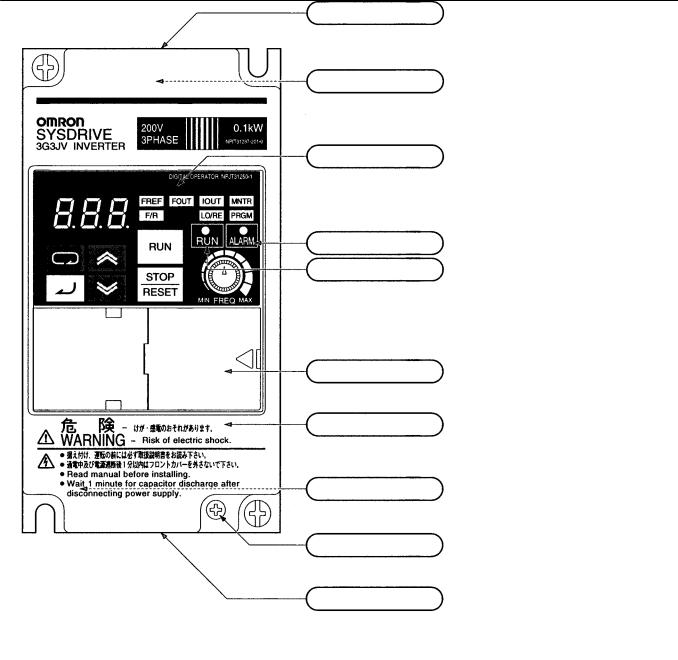
Nomenclature

 Panel
Panel
Top protection cover:
Remove this cover when wiring the upper terminal block.
Upper terminal block:
A terminal block on the input side of the main circuit.
Digital Operator:
Used to set parameters, perform various monitoring, and start and stop the Inverter.
ALARM indicator:
RUN indicator:
Displays the operating status of the Inverter.
Alarm (Red): Lights when an error occurs. Flashes when a warning occurs.
RUN (Green): Flashes when no RUN command is input during normal status. Lights when a RUN command is input during normal status.
Optional cover:
Remove this cover when setting the input method selector.
Front cover:
Remove this cover when wiring the upper or lower terminal block.
Front cover mounting screw:
A screw for fixing the front cover.
Lower terminal blocks:
A terminal block on the output side of the main circuit and a terminal block for the control circuit.
Bottom protection cover:
Remove this cover when wiring the lower terminal blocks.
6

Nomenclature

 Digital Operator
Digital Operator
|
Data display |
Indicators |
|
(Setting/Monitor item |
|
|
indicators) |
|
|
Keys |
FREQ adjuster |
|
Appearance |
Name |
Function |
|
Data display |
Displays relevant data items, such as frequency reference, output frequency, |
|
|
and parameter set values. |
||
|
Frequency adjuster |
Sets the frequency reference within a range between 0 Hz and the maximum |
|
|
frequency. |
||
|
Frequency reference |
The frequency reference can be monitored or set while this indicator is lit. |
|
|
indicator |
||
|
Output frequency |
The output frequency of the Inverter can be monitored while this indicator is |
|
|
indicator |
lit. |
|
|
Output current |
The output current of the Inverter can be monitored while this indicator is lit. |
|
|
indicator |
||
|
Multi-function |
The values set in U01 through U10 are monitored while this indicator is lit. |
|
|
monitor indicator |
||
|
Forward/Reverse |
The direction of rotation can be selected while this indicator is lit when |
|
|
selection indicator |
operating the Inverter with the RUN Key. |
|
|
Local/Remote |
The operation of the Inverter through the Digital Operator or according to the |
|
|
selection indicator |
set parameters is selectable while this indicator is lit. (See note 1.) |
|
|
Parameter setting |
The parameters in n01 through n79 can be set or monitored while this |
|
|
indicator |
indicator is lit. (See note 2.) |
|
|
Mode Key |
Switches the setting and monitor item indicators in sequence. |
|
|
Parameter being set will be canceled if this key is pressed before entering |
||
|
the setting. |
||
|
Increment Key |
Increases multi-function monitor numbers, parameter numbers, and |
|
|
parameter set values. |
||
|
Decrement Key |
Decreases multi-function monitor numbers, parameter numbers, and |
|
|
parameter set values. |
||
|
Enter Key |
Enters multi-function monitor numbers, parameter numbers, and internal |
|
|
data values after they are set or changed. |
||
|
RUN Key |
Starts the Inverter running when the 3G3JV is in operation with the Digital |
|
|
Operator. |
||
|
STOP/RESET Key |
Stops the Inverter unless parameter n06 is set to disable the STOP Key. |
|
|
Used to reset the Inverter when an error occurs. (See note 3.) |
||
Note: 1. The status of the local/remote selection indicator can be only monitored while the Inverter is in operation. Any RUN command input is ignored while this indicator is lit.
2.While the Inverter is in operation, the parameters can be only monitored and only some parameters can be changed. Any RUN command input is ignored while the parameter setting indicator is lit.
3.For safety reasons, the reset function cannot be used while an operation instruction (forward/reverse) is being input. Turn the operation instruction OFF before using this function.
7

Using Digital Operator

 Selecting Indicators
Selecting Indicators
Power ON
represents a lit indicator.
|
Frequency |
Output |
Output current |
|
|
reference |
frequency |
||
|
Parameter |
Local/Remote |
Direction of |
Multi-function |
|
settings |
selection |
rotation |
monitor |
|
Parameter n01 |
Remote mode |
Forward |
Frequency reference |
|
Parameter n02 |
Local mode |
Reverse |
Output frequency |
|
Other parameters |
Other monitor items |
Note: If the power is turned OFF with the FOUT or IOUT indicator lit, the same indicator will light when the power is turned ON again. In other cases, the FREF indicator will light when the power is turned ON.

 Example of Frequency Reference Settings
Example of Frequency Reference Settings
Flashing
|
Key sequence |
Indicator |
Display example |
Explanation |
|
|
Power ON |
||||
|
Note |
If the FREF indicator has not been lit, press the Mode |
|||
|
Key repeatedly until the FREF indicator is lit. |
||||
|
Use the Increment or Decrement Key to set the frequency |
||||
|
reference. |
||||
|
The data display will flash while the frequency reference is |
||||
|
set. (see note 1) |
||||
|
Press the Enter Key so that the set value will be entered and |
||||
|
the data display will be lit. (see note 1) |
Note: The Enter Key need not be pressed when performing the setting for n08. The frequency reference will change when the set value is changed with the Increment or Decrement Key while the data display is continuously lit.
8

Using Digital Operator

 Example of Multi-function Display
Example of Multi-function Display
|
Frequency |
DC bus |
Monitor |
||
|
reference |
voltage |
data |
||
|
Complete |
||||
|
Key sequence |
Indicator |
Display |
Explanation |
|
|
Power ON |
||||
|
Press the Mode Key repeatedly until the MNTR indicator is |
||||
|
lit. |
||||
|
U01 will be displayed. |
||||
|
Use the Increment or Decrement Key to select the monitor |
||||
|
item to be displayed. |
||||
|
Press the Enter Key so that the data of the selected monitor |
||||
|
item will be displayed. |
||||
|
The monitor number display will appear again by pressing |
||||
|
the Mode Key. |
Status Monitor
|
Item |
Display |
Display |
Function |
||
|
unit |
|||||
|
U01 |
Frequency reference |
Hz |
Monitors the frequency reference. (Same as FREF) |
||
|
U02 |
Output frequency |
Hz |
Monitors the output frequency. (Same as FOUT) |
||
|
U03 |
Output current |
A |
Monitors the output current. (Same as IOUT) |
||
|
U04 |
Output voltage |
V |
Monitors the internal output voltage reference value of the Inverter. |
||
|
U05 |
DC bus voltage |
V |
Monitors the DC voltage of the internal main circuit of the Inverter. |
||
|
U06 |
Input terminal status |
— |
Shows the ON/OFF status of inputs. |
||
|
: Input ON |
: No input |
||||
|
Terminal S1: Forward/Stop |
|||||
|
Terminal S2: Multi-function input 1 (S2) |
|||||
|
Terminal S3: Multi-function input 2 (S3) |
|||||
|
Not |
Terminal S4: Multi-function input 3 (S4) |
||||
|
Terminal S5: Multi-function input 4 (S5) |
|||||
|
used |
|||||
|
U07 |
Output terminal |
— |
Shows the ON/OFF status of outputs. |
||
|
status |
|||||
|
: Closed |
: Open |
||||
|
Not |
Terminal MA: Multi-function contact |
||||
|
used |
output |
||||
|
U09 |
Error log (most |
— |
Displays the latest error. |
||
|
recent one) |
|||||
|
Error |
|||||
|
U10 |
Software No. |
— |
OMRON use only. |
9
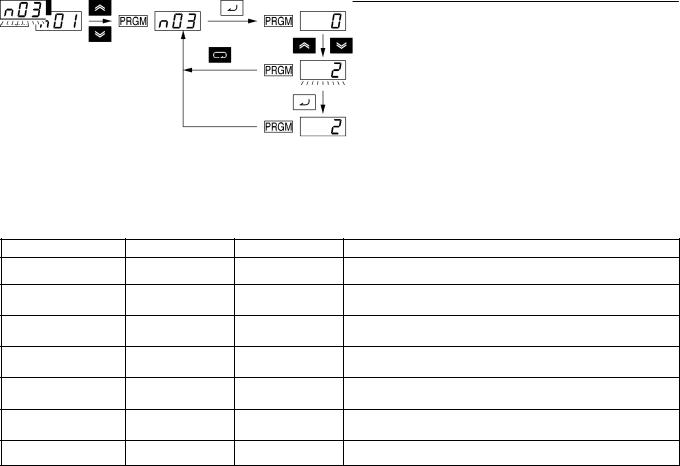
Using Digital Operator

 Example of Parameter Settings
Example of Parameter Settings
The following example shows how to set 2 to enable the frequency reference control terminal for 0- to 10-V input in parameter n03 (Frequency Reference Selection).
Enable the frequency reference Cancels set control terminal for 0- to 10-V input. data.
Complete
In approximately 1 s.
|
Key sequence |
Indicator |
Display example |
Explanation |
Power ON
Press the Mode Key repeatedly until the PRGM indicator is lit.
Use the Increment or Decrement Key to set the parameter number.
Press the Enter Key.
The data of the selected parameter number will be displayed.
Use the Increment or Decrement Key to set the data. At that time the display will flash.
Press the Enter Key so that the set value will be entered and the data display will be lit. (see note 1)
|
In approximately 1 s. |
The parameter number will be displayed. |
Note: 1. To cancel the set value, press the Mode Key instead. The parameter number will be displayed.
2.There are parameters that cannot be changed while the Inverter is in operation. Refer to the list of parameters. When attempting to change such parameters, the data display will not change by pressing the Increment or Decrement Key.
10

List of Parameters

 List of Parameters
List of Parameters
|
Param- |
Name |
Description |
Setting |
Unit of |
Default |
Changes |
Refer- |
|
|
eter |
range |
setting |
setting |
during op- |
ence |
|||
|
No. |
(see note 2) |
eration |
page |
|||||
|
n01 |
Parameter |
Used to prohibit parameters to be written, sets |
0, 1, 6, 8, 9 |
1 |
1 |
No |
14 |
|
|
write-prohibit selection/ |
parameters, or change the monitor range of |
|||||||
|
parameter initialization |
parameters. |
|||||||
|
Used to initialize parameters to default values. |
||||||||
|
n02 |
Operation mode selec- |
Used to select the input method for the RUN and STOP |
0, 1 |
1 |
0 |
No |
14 |
|
|
tion |
commands in remote mode. |
|||||||
|
n03 |
Frequency reference |
Used to set the input method for the frequency refer- |
0 to 4 |
1 |
0 |
No |
14 |
|
|
selection |
ence in remote mode. |
|||||||
|
n04 |
Interruption mode selec- |
Used to set the stopping method for use when the |
0, 1 |
1 |
0 |
No |
14 |
|
|
tion |
STOP command is input. |
|||||||
|
n05 |
Reverse rotation-prohibit |
Used to select the operation with the reverse command |
0, 1 |
1 |
0 |
No |
14 |
|
|
selection |
input. |
|||||||
|
n06 |
STOP/RESET Key func- |
Used to select the stop method in remote mode with |
0, 1 |
1 |
0 |
No |
14 |
|
|
tion selection |
n02 for operation mode selection set to 1. |
|||||||
|
n07 |
Frequency selection in |
Used to set the input method for the frequency refer- |
0, 1 |
1 |
0 |
No |
14 |
|
|
local mode |
ence in local mode. |
|||||||
|
n08 |
Key sequential |
Used to enable the Enter Key for setting the frequency |
0, 1 |
1 |
0 |
No |
14 |
|
|
frequency setting |
reference with the Increment and Decrement Keys. |
|||||||
|
n09 |
Maximum frequency |
Used to set the V/f pattern as the basic characteristic of |
50.0 to 400 |
0.1 Hz |
60.0 |
No |
14 |
|
|
(FMAX) |
the Inverter with output voltage per frequency set. |
|||||||
|
Note Set the parameters so that the following condition |
||||||||
|
n10 |
Maximum voltage |
1 to 255 |
1 V |
200 (see |
No |
14 |
||
|
(VMAX) |
will be satisfied. |
(see note 1) |
note 1) |
|||||
|
n14 x n12 < n11 x n09 |
||||||||
|
n11 |
Maximum voltage fre- |
0.2 to 400 |
0.1 Hz |
60.0 |
No |
14 |
||
|
Note The value set in n13 will be ignored if parameters |
||||||||
|
quency (FA) |
||||||||
|
n14 and n12 are the same in value. |
||||||||
|
n12 |
Middle output |
0.1 to 399 |
0.1 Hz |
1.5 |
No |
14 |
||
|
frequency (FB) |
||||||||
|
n13 |
Middle output |
1 to 255 |
1 V |
12 (see |
No |
14 |
||
|
frequency voltage (VC) |
(see note 1) |
note 1) |
||||||
|
n14 |
Minimum output |
0.1 to 10.0 |
0.1 Hz |
1.5 |
No |
14 |
||
|
frequency (FMIN) |
||||||||
|
n15 |
Minimum output |
1 to 50 |
1 V |
12 (see |
No |
14 |
||
|
frequency voltage |
(see note 1) |
note 1) |
||||||
|
(VMIN) |
||||||||
|
n16 |
Acceleration time 1 |
Acceleration time: The time required to go from 0% to |
0.0 to 999 |
0.1 s |
10.0 |
Yes |
15 |
|
|
100% of the maximum frequency. |
||||||||
|
Deceleration time: The time required to go from 100% |
||||||||
|
n17 |
Deceleration time 1 |
10.0 |
Yes |
15 |
||||
|
to 0% of the maximum frequency. |
||||||||
|
Note The actual acceleration or deceleration time is ob- |
||||||||
|
n18 |
Acceleration time 2 |
10.0 |
Yes |
15 |
||||
|
tained from the following formula. |
||||||||
|
Acceleration/Deceleration time = (Acceleration/De- |
||||||||
|
n19 |
Deceleration time 2 |
celeration time set value) × (Frequency reference |
10.0 |
Yes |
15 |
|||
|
value) ÷ (Max. frequency) |
||||||||
|
n20 |
S-shape acceleration/de- |
Used to set S-shape acceleration/deceleration charac- |
0 to 3 |
1 |
0 |
No |
15 |
|
|
celeration characteristic |
teristics. |
|||||||
|
n21 |
Frequency reference 1 |
Used to set internal frequency references. |
0.0 to max. |
0.1 Hz |
6.0 |
No |
15 |
|
|
Note Frequency reference 1 is enabled in remote mode |
frequency |
|||||||
|
n22 |
Frequency reference 2 |
0.0 |
No |
15 |
||||
|
with n03 for frequency reference selection set to 1. |
||||||||
|
n23 |
Frequency reference 3 |
0.0 |
No |
15 |
||||
|
Note These frequency references are selected with mul- |
||||||||
|
n24 |
Frequency reference 4 |
0.0 |
No |
15 |
||||
|
ti-step speed references (multi-function input). See |
||||||||
|
n25 |
Frequency reference 5 |
the reference pages for the relationship between |
0.0 |
No |
15 |
|||
|
n26 |
Frequency reference 6 |
multi-step speed references and frequency refer- |
0.0 |
No |
15 |
|||
|
ences. |
||||||||
|
n27 |
Frequency reference 7 |
0.0 |
No |
15 |
||||
|
n28 |
Frequency reference 8 |
0.0 |
No |
15 |
||||
|
n29 |
Inching frequency com- |
Used to set the inching frequency command. |
6.0 |
No |
15 |
|||
|
mand |
Note: 1. With 400-class Inverters, the default settings and maximum values setting ranges for n10, n13, and n15 are double those given in the table.
2. Values longer than 3 digits are rounded up to the next unit multiple.
11

List of Parameters
|
Param- |
Name |
Description |
Setting |
Unit of |
Default |
Changes |
Reference |
||
|
eter |
range |
setting |
setting |
during op- |
page |
||||
|
No. |
(see note) |
eration |
|||||||
|
n30 |
Frequency reference |
Used to set the upper and lower frequency reference |
0 to 110 |
1% |
100 |
No |
16 |
||
|
upper limit |
limits in percentage based on the maximum frequency |
||||||||
|
as 100%. |
|||||||||
|
n31 |
Frequency reference |
0 to 110 |
1% |
0 |
No |
16 |
|||
|
lower limit |
|||||||||
|
n32 |
Rated motor current |
Used to set the rated motor current for motor overload |
0.0 to 120% |
0.1 A |
Varies |
No |
16 |
||
|
detection (OL1) based on the rated motor current. |
of rated out- |
with the |
|||||||
|
Note Motor overload detection (OL1) is disabled by set- |
put current |
capacity. |
|||||||
|
ting the parameter to 0.0. |
|||||||||
|
n33 |
Motor protection |
Used to set the motor overload detection (OL1) for the |
0 to 2 |
1 |
0 |
No |
16 |
||
|
characteristics |
electronic thermal characteristics of the motor. |
||||||||
|
n34 |
Motor protective |
Used to set the electric thermal characteristics of the |
1 to 60 |
1 min |
8 |
No |
16 |
||
|
time setting |
motor to be connected in 1-minute increments. |
||||||||
|
n35 |
Cooling fan opera- |
Used to operate the Cooling Fan of the Inverter while |
0, 1 |
1 |
0 |
No |
16 |
||
|
tion function |
the Inverter is turned on or only while the Inverter is in |
||||||||
|
operation. |
|||||||||
|
n36 |
Multi-function input 1 |
Used to select the functions of multi-function input ter- |
2 to 22 |
1 |
2 |
No |
16 |
||
|
(Input terminal S2) |
minals S2 through S5. |
||||||||
|
n37 |
Multi-function input 2 |
0 to 22 |
1 |
5 |
No |
16 |
|||
|
(Input terminal S3) |
|||||||||
|
n38 |
Multi-function input 3 |
2 to 22 |
1 |
3 |
No |
16 |
|||
|
(Input terminal S4) |
|||||||||
|
n39 |
Multi-function input 4 |
2 to 34 |
1 |
6 |
No |
16 |
|||
|
(Input terminal S5) |
|||||||||
|
n40 |
Multi-function output |
Used to select the functions of multi-function output |
0 to 7, 10 to |
1 |
1 |
No |
17 |
||
|
(MA/MB and MC |
terminals. |
17 |
|||||||
|
output terminals) |
|||||||||
|
n41 |
Frequency reference |
Used to the input characteristics of analog frequency |
0 to 255 |
1% |
100 |
Yes |
17 |
||
|
gain |
references. |
||||||||
|
n42 |
Frequency reference |
–99 to 99 |
1% |
0 |
Yes |
17 |
|||
|
bias |
|||||||||
|
n43 |
Analog frequency |
Used to set the digital filter with a first-order lag for ana- |
0.00 to 2.00 |
0.01 s |
0.10 |
No |
17 |
||
|
reference filter time |
log frequency references to be input. |
||||||||
|
n44 |
Analog monitor |
Used to set the output frequency or current as a moni- |
0, 1 |
1 |
0 |
No |
17 |
||
|
output |
tored item. |
||||||||
|
n45 |
Analog monitor |
Used to set the output characteristics of analog monitor |
0.00 to 2.00 |
0.01 |
1.00 |
Yes |
17 |
||
|
output gain |
output. |
||||||||
|
n46 |
Carrier frequency |
Used to set the carrier frequency. |
1 to 4, 7 to |
1 |
Varies |
No |
18 |
||
|
selection |
9 |
with the |
|||||||
|
capacity. |
|||||||||
|
n47 |
Momentary power |
Used to specify the processing that is performed when |
0 to 2 |
1 |
0 |
No |
18 |
||
|
interruption com- |
a momentary power interruption occurs. |
||||||||
|
pensation |
|||||||||
|
n48 |
Fault retry |
Used to set the number of times the Inverter is reset |
0 to 10 |
1 |
0 |
No |
18 |
||
|
and restarted automatically in the case the Inverter has |
|||||||||
|
an overvoltage fault, overcurrent fault, or ground fault. |
|||||||||
|
n49 |
Jump frequency 1 |
Used to set the frequency jump function. |
0.0 to 400 |
0.1 Hz |
0.0 |
No |
18 |
||
|
n50 |
Jump frequency 2 |
Note |
These values must satisfy the following condi— |
0.0 to 400 |
0.1 Hz |
0.0 |
No |
18 |
|
|
n51 |
Jump width |
tion: n49 y n50 |
0.0 to 400 |
0.1 Hz |
0.0 |
No |
18 |
||
|
n52 |
DC control current |
Used to impose DC on the induction motor for braking |
0 to 100 |
1% |
50 |
No |
18 |
||
|
control. |
|||||||||
|
n53 |
Interruption DC |
0.0 to 25.5 |
0.1 s |
0.5 |
No |
18 |
|||
|
control time |
|||||||||
|
n54 |
Startup DC control |
0.0 to 25.5 |
0.1 s |
0.0 |
No |
18 |
|||
|
time |
|||||||||
|
n55 |
Stall prevention |
Used to select a function to change the deceleration |
0, 1 |
1 |
0 |
No |
18 |
||
|
during deceleration |
time of the motor automatically so that there will be no |
||||||||
|
overvoltage imposed on the motor during deceleration. |
|||||||||
|
n56 |
Stall prevention level |
Used to select a function to stop the acceleration of the |
30 to 200 |
1% |
170 |
No |
19 |
||
|
during acceleration |
motor automatically for stall prevention during |
||||||||
|
acceleration. |
|||||||||
|
n57 |
Stall prevention level |
Used to select a function to reduce the output |
30 to 200 |
1% |
160 |
No |
19 |
||
|
during operation |
frequency of the Inverter automatically for stall |
||||||||
|
prevention during operation. |
|||||||||
|
n58 |
Frequency detection |
Used to set the frequency to be detected. |
0.0 to 400 |
0.1 Hz |
0.0 |
No |
19 |
||
|
level |
Note: Values longer than 3 digits are rounded up to the next unit multiple.
12
![]()
List of Parameters
|
Param- |
Name |
Description |
Setting |
Unit of |
Default |
Changes |
Reference |
|
|
eter |
range |
setting |
setting |
during op- |
page |
|||
|
No. |
(see note) |
eration |
||||||
|
n59 |
Overtorque |
Used to enable or disable overtorque detection and |
0 to 4 |
1 |
0 |
No |
19 |
|
|
detection function |
select the processing method after overtorque |
|||||||
|
selection |
detection. |
|||||||
|
n60 |
Overtorque |
Used to set overtorque detection level. |
30 to 200 |
1% |
160 |
No |
19 |
|
|
detection level |
||||||||
|
n61 |
Overtorque |
Used to set the detection time of overtorque. |
0.1 to 10.0 |
0.1 s |
0.1 |
No |
19 |
|
|
detection time |
||||||||
|
n62 |
UP/DOWN |
Used to store the adjusted frequency reference with the |
0, 1 |
1 |
0 |
No |
20 |
|
|
command frequency |
UP/DOWN function. |
|||||||
|
memory |
||||||||
|
n63 |
Torque |
Used to set the gain of the torque compensation |
0.0 to 2.5 |
0.1 |
1.0 |
Yes |
21 |
|
|
compensation gain |
function. |
|||||||
|
n64 |
Motor rated slip |
Used to set the rated slip value of the motor in use. |
0.0 to 20.0 |
0.1 Hz |
Varies |
Yes |
21 |
|
|
with the |
||||||||
|
capacity. |
||||||||
|
n65 |
Motor no-load |
Used to set the no-load current of the motor in use |
0 to 99 |
1% |
Varies |
No |
21 |
|
|
current |
based on the rated motor current as 100%. |
with the |
||||||
|
capacity. |
||||||||
|
n66 |
Slip compensation |
Used to set the gain of the slip compensation function. |
0.0 to 2.5 |
0.1 |
0.0 |
Yes |
21 |
|
|
gain |
||||||||
|
n67 |
Slip compensation |
Used for the response speed of the slip compensation |
0.0 to 25.5 |
0.1 s |
2.0 |
No |
21 |
|
|
time constant |
function. |
|||||||
|
n68 to |
OMRON’s control |
Do not change the set value. |
— |
— |
— |
— |
— |
|
|
n74 |
reference use |
|||||||
|
n75 |
Low-speed carrier |
Used to select a function to reduce the carrier |
0.1 |
1 |
0 |
No |
— |
|
|
frequency reduction |
frequency when Inverter is at low speed. |
|||||||
|
selection |
||||||||
|
n76 |
OMRON’s control |
Do not change the set value. |
— |
— |
— |
— |
— |
|
|
reference use |
||||||||
|
n77 |
||||||||
|
n78 |
Error log |
Used to display the latest error recorded. |
— |
— |
— |
— |
— |
|
|
Display |
||||||||
|
Note |
“– – –” will be displayed if no error has been re- |
|||||||
|
corded. |
||||||||
|
Note |
This parameter is monitored only. |
|||||||
|
n79 |
Software number |
Used to display the software number of the Inverter for |
— |
— |
— |
— |
— |
|
|
OMRON’s control reference use. |
||||||||
|
Note This parameter is monitored only. |
||||||||
Note: Values longer than 3 digits are rounded up to the next unit multiple.
13
Function of Each Parameter
Note: The shaded values indicate default settings.
Parameter Write-prohibit Selection/Parameter
Initialization (n01)
This parameter makes it possible to write-prohibit parameters, change the parameter set or displayed range, or initialize all parameters to default values.
|
Value |
Description |
|
0 |
Only n01 can be displayed and set. The n02 through n79 |
|
parameters can be displayed only. |
|
|
1 |
The n01 through n79 parameters can be displayed and set. |
|
6 |
Only the error log memory is cleared. |
|
8 |
Enables the initialization of all parameters in 2-wire sequence so |
|
that the parameters will return to default values. |
|
|
9 |
Enables the initialization of all parameters in 3-wire sequence. |
Operation Mode Selection (n02)
Select the method of operation mode input to start or stop the Inverter in remote mode.
0The RUN and STOP/RESET Keys of the Digital Operator are enabled.
1Multi-function input in 2- or 3-wire sequence through the control circuit terminals is enabled.
Note: In local mode, RUN commands can be entered using the Digital Operator only.
Frequency Reference Selection (n03)
(Remote Mode)
Select the method for inputting the frequency reference to the Inverter in remote mode.
0The FREQ adjuster of the Digital Operator is enabled.
1Frequency reference 1 (n21) is enabled.
2The frequency reference control terminal (for 0- to 10-V input) is enabled.
3The frequency reference control terminal (for 4- to 20-mA current input) is enabled.
4The frequency reference control terminal (for 0- to 20-mA current input) is enabled.
Interruption Mode Selection (n04)
Select the stopping method to be used when the STOP command is input.
0Frequency deceleration stop (Decelerates to stop in preset time.)
1Free running (Output shut OFF by STOP command.)
Reverse Rotation-prohibit Selection (n05)
Select the operation to be performed when the reverse rotation command is input.
0Reverse rotation possible (command accepted)
1Reverse rotation prohibited (command not accepted)
STOP/RESET Key Function Selection (n06)
When parameter n02 is set to 1, set whether or not to use the STOP/RESET Key of the Digital Operator to stop the Inverter in remote mode. The STOP/RESET Key is always enabled in local mode regardless of the setting in n02.
0The STOP/RESET Key of the Digital Operator is enabled.
1The STOP/RESET Key of the Digital Operator is disabled.
Frequency Reference Selection (n07)
(Local Mode)
Select the input method of frequency references in local mode.
0The FREQ adjuster of the Digital Operator is enabled.
1Key sequences on the Digital Operator are enabled.
Key Sequential Frequency Setting (n08)
Select whether to enable the Enter Key when setting the frequency reference with the Increment and Decrement Keys on the Digital Operator.
0The Enter Key is enabled. (The setting is made valid by pressing the Enter Key.)
1The Enter Key is disabled. (The setting is directly treated as a frequency reference without the Enter Key being pressed.)
V/f Pattern Settings (n09 to n15)
Set the V/f pattern as the basic characteristic of the Inverter with output voltage per frequency set.
|
Value |
Name |
Setting |
Unit of |
Default |
|
range |
setting |
settings |
||
|
n09 |
Maximum Frequency |
50.0 to 400 |
0.1 Hz |
60.0 |
|
(FMAX) |
||||
|
n10 |
Maximum Voltage (VMAX) |
1 to 255 |
1 V |
200 |
|
n11 |
Maximum Voltage |
0.2 to 400 |
0.1 Hz |
60.0 |
|
Frequency (FA) |
||||
|
n12 |
Middle Output Frequency |
0.1 to 399 |
0.1 Hz |
1.5 |
|
(FB) |
||||
|
n13 |
Middle Output Frequency |
1 to 255 |
1 V |
12 |
|
Voltage (VC) |
||||
|
n14 |
Minimum Output |
0.1 to 10.0 |
0.1 Hz |
1.5 |
|
Frequency (FMIN) |
||||
|
n15 |
Minimum Output |
1 to 50 |
1 V |
12 |
|
Frequency Voltage (VMIN) |
14

Function of Each Parameter
Note: For n09, n11, and n12, the unit of setting is as follows: Values will be set in 0.1-Hz increments if the frequency is less than 100 Hz and 1-Hz increments if the frequency is 100 Hz or greater.
Output voltage (V)
n10
n13
n15
Frequency
(Hz)
Note: 1. Set the parameters so that the following condition will be satisfied.
n14 x n12 < n11 x n09
2.The value set in n13 will be ignored if parameters n14 and n12 are the same in value.
Acceleration/Deceleration Time Settings (n16 to n19)
The acceleration time is the time required to go from 0% to 100% of the maximum frequency and the deceleration time is the time required to go from 100% to 0% of the maximum frequency. The actual acceleration or deceleration time is obtained from the following formula.
Acceleration/Deceleration time =
(Acceleration/Deceleration time set value) × (Frequency reference value) ÷ (Max. frequency)
|
Value |
Name |
Setting |
Unit of |
Default |
|
range |
setting |
set- |
||
|
tings |
||||
|
n16 |
Acceleration time 1 |
0.0 to 999 |
0.1 s |
10.0 |
|
n17 |
Deceleration Time 1 |
10.0 |
||
|
n18 |
Acceleration time 2 |
10.0 |
||
|
n19 |
Deceleration Time 2 |
10.0 |
||
S-shape Acceleration/Deceleration Characteristic (n20)
Any one of three S-shape acceleration/deceleration times (0.2, 0.5, and 1.0 s) is selectable.
|
Value |
Description |
|
0 |
No S-shape acceleration/deceleration characteristic |
|
(Trapezoidal acceleration/deceleration) |
|
|
1 |
S-shape acceleration/deceleration characteristic time is 0.2 s |
|
2 |
S-shape acceleration/deceleration characteristic time is 0.5 s |
|
3 |
S-shape acceleration/deceleration characteristic time is 1.0 s |
Note: When the S-shape acceleration/deceleration characteristic time is set, the acceleration and deceleration times will be lengthened according to the S-shape at the beginning and end of acceleration/deceleration.
Setting the Frequency References 1 to 8 and the Inching Frequency Command (n21 to n28 and n29)
Set internal frequency references.
|
Value |
Name |
Setting |
Unit of |
Default |
|
|
range |
setting |
set- |
|||
|
tings |
|||||
|
n21 |
Frequency reference 1 |
0.0 to max. |
0.1 Hz |
6.0 |
|
|
frequency |
(see note |
||||
|
n22 |
Frequency reference 2 |
0.0 |
|||
|
1) |
|||||
|
n23 |
Frequency reference 3 |
0.0 |
|||
|
n24 |
Frequency reference 4 |
0.0 |
|||
|
n25 |
Frequency reference 5 |
0.0 |
|||
|
n26 |
Frequency reference 6 |
0.0 |
|||
|
n27 |
Frequency reference 7 |
0.0 |
|||
|
n28 |
Frequency reference 8 |
0.0 |
|||
|
n29 |
Inching frequency com- |
6.0 |
|||
|
mand |
Note: 1. Values will be set in 0.1-Hz increments if the frequency is less than 100 Hz and 1-Hz increments if the frequency is 100 Hz or over.
2.Frequency reference 1 is enabled with n03 for frequency reference selection set to 1. (Remote mode)
3.Frequency references 1 to 8 are enabled by setting multistep speed references 1, 2, and 3 in n36 to n39 for multi-func- tion input. Refer to the following table for the relationship between multi-step speed references 1 to 3 and frequency references 1 to 8.
|
Frequency |
Multi-step speed |
Multi-step speed |
Multi-step speed |
|
reference |
reference 1 |
reference 2 |
reference 3 |
|
Frequency |
OFF |
OFF |
OFF |
|
reference 1 |
|||
|
Frequency |
ON |
OFF |
OFF |
|
reference 2 |
|||
|
Frequency |
OFF |
ON |
OFF |
|
reference 3 |
|||
|
Frequency |
ON |
ON |
OFF |
|
reference 4 |
|||
|
Frequency |
OFF |
OFF |
ON |
|
reference 5 |
|||
|
Frequency |
ON |
OFF |
ON |
|
reference 6 |
|||
|
Frequency |
OFF |
ON |
ON |
|
reference 7 |
|||
|
Frequency |
ON |
ON |
ON |
|
reference 8 |
Note: 1. “ON” and “OFF” represent “input ON” and “input OFF,” respectively.
2.Inching frequency commands take precedence over multistep speed references.
15
Function of Each Parameter
Frequency Reference Upper and Lower Limit
Settings (n30 and n31)
Set the upper and lower frequency reference limits in percentage based on the maximum frequency as 100%.
|
Value |
Name |
Setting |
Unit of |
Default |
|
range |
setting |
settings |
||
|
n30 |
Frequency Reference |
0 to 110 |
1% |
100 |
|
Upper Limit |
||||
|
n31 |
Frequency Reference |
0 to 110 |
1% |
0 |
|
Lower Limit |
Note: If n31 is set to a value less than the minimum output frequency (FMIN) (n14), the Inverter will have no output when a frequency reference less than the minimum output frequency input is ON.
Rated Motor Current Setting (n32)
Set the rated motor current as the reference value for motor overload detection (OL1).
Note: 1. Setting 0.0 disables the motor overload detection (OL1) function.
2.The rated motor current value is factory-set for each Inverter according to the maximum applicable motor capacity.
|
Value |
Name |
Setting range |
Unit of |
Default |
|
setting |
settings |
|||
|
n32 |
Rated Motor Current |
0.0% to 120% (A) of |
0.1 A |
Varies with |
|
rated output current |
the capac- |
|||
|
of Inverter |
ity. |
Motor Protection Characteristic Selection (n33)
Set the motor overload detection (OL1) for the electronic thermal characteristics of the motor.
0Protection characteristics for general-purpose induction motors
1Protection characteristics for Inverter-dedicated motors
2No protection
Note: When connecting multiple motors to one Inverter, set 2 (equivalent to n32 = 0.0). In addition, take overload prevention measures by mounting a thermal relay in each motor, for example.
Motor Protective Time Setting (n34)
Set the electronic thermal characteristics of the motor to be connected in 1-minute increments.
|
Value |
Name |
Setting |
Unit of |
Default |
|
range |
setting |
settings |
||
|
n34 |
Motor Protective Time |
1 to 60 |
1 min |
8 |
|
Setting |
Note: 1. The default setting does not need any changes in normal operation.
2.To set the parameter according to the characteristics of the motor, confirm the thermal time constant with the motor manufacturer and set the parameter with some margin. In other words, set the value a little shorter than the thermal time constant.
3.To detect motor overloading more quickly, reduce the set value, provided that it does not cause any application problems.
Cooling Fan Operation Function Selection (n35)
This parameter is used to operate the cooling fan of the Inverter while the Inverter is turned on or only while the Inverter is in operation.
0The fan rotates only while the RUN command is input and for 1 minute after the Inverter stops operating.
1The fan rotates while the Inverter is turned ON.
Note: 1. This parameter is available only if the Inverter incorporates a cooling fan.
2.If the operation frequency of the Inverter is low, the life of the fan can be prolonged by setting the parameter to 0.
Multi-function Input Selection (n36 to n39)
Select the functions of multi-function input terminals S2 to S5.
|
Value |
Name |
Setting |
Unit of |
Default |
|
range |
setting |
settings |
||
|
n36 |
Multi-function Input 1 |
2 to 8, 10 to |
1 |
2 |
|
(S2) |
22 |
|||
|
n37 |
Multi-function Input 2 |
0, 2 to 8, 10 |
1 |
5 |
|
(S3) |
to 22 |
|||
|
n38 |
Multi-function Input 3 |
2 to 8, 10 to |
1 |
3 |
|
(S4) |
22 |
|||
|
n39 |
Multi-function Input 4 |
2 to 8, 10 to |
1 |
6 |
|
(S5) |
22, 34 |
|
Value |
Function |
Description |
|
|
0 |
Forward/Reverse |
3-wire sequence (to be set in n37 only) |
|
|
rotation command |
This setting overrides the n36 setting. |
||
|
S1: |
RUN input (RUN when ON) |
||
|
S2: |
STOP input |
||
|
(STOP when OFF) |
|||
|
S3: |
Forward/Reverse rotation |
||
|
command |
|||
|
(ON: Reverse) |
|||
|
2 |
Reverse/Stop |
Reverse rotation command (2-wire |
|
|
sequence) (ON: Reverse) |
|||
|
3 |
External fault (NO) |
ON: External fault |
|
|
4 |
External fault (NC) |
OFF: External fault |
|
|
5 |
Fault reset |
ON: Fault reset |
|
|
Note |
Disabled while RUN command is |
||
|
input |
|||
|
6 |
Multi-step speed |
Signals to select frequency references 1 to |
|
|
reference 1 |
8. |
||
|
7 |
Multi-step speed |
||
|
reference 2 |
|||
|
8 |
Multi-step speed |
||
|
reference 3 |
|||
|
10 |
Inching frequency |
ON: Inching frequency command |
|
|
command |
|||
|
11 |
Acceleration/Decel- |
ON: Acceleration/deceleration time 2 |
|
|
eration time selec- |
|||
|
tion |
|||
|
12 |
External base block |
ON: Output shut OFF (while motor coasting |
|
|
command (NO) |
to a stop and “bb” flashing) |
||
|
13 |
External base block |
OFF: Output shut OFF (with motor free |
|
|
command (NC) |
running and “bb” flashing) |
||
|
14 |
Search command |
ON: Speed search (Searching starts from |
|
|
(Searching starts |
n09) |
||
|
from maximum fre- |
|||
|
quency) |
|||
16
Function of Each Parameter
|
Value |
Function |
Description |
||
|
15 |
Search command |
ON: Speed search (Searching starts from |
||
|
(Searching starts |
the frequency specified by n03.) |
|||
|
from preset frequen- |
||||
|
cy) |
||||
|
16 |
Acceleration/Decel- |
ON: Acceleration/Deceleration is on hold |
||
|
eration-prohibit com- |
||||
|
mand |
||||
|
17 |
Local or remote |
ON: Local mode (operated with the Digital |
||
|
selection |
Operator) |
|||
|
19 |
Emergency stop |
The Inverter stops according to the setting in |
||
|
fault (NO) |
n04 for interruption mode selection when the |
|||
|
emergency stop input turns ON. |
||||
|
Note |
NO: Emergency stop with the con- |
|||
|
20 |
Emergency stop |
|||
|
tact closed. |
||||
|
alarm (NO) |
||||
|
NC: Emergency stop with the con- |
||||
|
tact opened. |
||||
|
21 |
Emergency stop |
Note |
Fault: Fault output is ON and reset |
|
|
fault (NC) |
||||
|
with RESET input. Alarm output is |
||||
|
ON (no reset required). |
||||
|
22 |
Emergency stop |
Note |
“STP” is displayed (lit with fault in- |
|
|
alarm (NC) |
put ON and flashes with alarm in- |
|||
|
put ON) |
||||
|
34 |
Up or down com- |
Up or down command (set in n39 only) |
||
|
mand |
This setting overrides the n38 setting. |
|||
|
S4: Up command |
||||
|
S5: Down command |
||||
Multi-function Output Selection (n40)
Select the functions of multi-function output terminals.
|
Value |
Name |
Setting |
Unit of |
Default |
||||||
|
range |
setting |
set- |
||||||||
|
tings |
||||||||||
|
n40 |
Multi-function Output (MA/ |
0 to 7, 10 to |
1 |
1 |
||||||
|
MB and MC) |
17 |
|||||||||
|
Value |
Function |
Description |
||||||||
|
0 |
Fault output |
ON: Fault output |
||||||||
|
1 |
Operation in |
ON: Operation in progress |
||||||||
|
progress |
||||||||||
|
2 |
Frequency |
ON: Frequency detection |
||||||||
|
detection |
||||||||||
|
3 |
Idling |
ON: Idling |
||||||||
|
4 |
Frequency |
ON: Output frequency y frequency detection |
||||||||
|
detection 1 |
level (n58) |
|||||||||
|
5 |
Frequency |
ON: Output frequency x frequency detection |
||||||||
|
detection 2 |
level (n58) |
|||||||||
|
6 |
Overtorque |
Output if any of the following parameter |
||||||||
|
being monitored |
conditions is satisfied. |
|||||||||
|
(NO-contact |
• |
Overtorque detection function selection (n59) |
||||||||
|
output) |
||||||||||
|
• |
||||||||||
|
Overtorque detection level (n60) |
||||||||||
|
7 |
Overtorque |
• |
Overtorque detection time (n61) |
|||||||
|
being monitored |
Note |
NO contact: ON with overtorque be- |
||||||||
|
(NC-contact |
||||||||||
|
ing detected; NC contact: OFF with |
||||||||||
|
output) |
||||||||||
|
overtorque being detected |
||||||||||
|
8 |
(Not used) |
— |
||||||||
|
9 |
||||||||||
|
10 |
Alarm output |
ON: Alarm being detected (Nonfatal error) |
||||||||
|
11 |
Base block in |
ON: Base block in progress |
||||||||
|
progress |
||||||||||
|
12 |
RUN mode |
ON: Local mode |
||||||||
|
13 |
Inverter ready |
ON: Inverter ready to operate |
||||||||
|
14 |
Fault retry |
ON: Fault retry |
||||||||
|
Value |
Function |
Description |
|
15 |
UV in progress |
ON: Undervoltage being monitored (main circuit |
|
undervoltage UV or UV1 detected) |
||
|
16 |
Rotating in |
ON: Rotating in reverse direction |
|
reverse |
||
|
direction |
||
|
17 |
Speed search |
ON: Speed search in progress |
|
in progress |
Note: Use “operation in progress” or “frequency detection 1/2” for the timing of the external brake.
Gain and Bias Settings (n41 and n42)
Set the input characteristics of analog frequency references in n41 (for the frequency reference gain) and n42 (for the frequency reference bias).
Set the frequency of maximum analog input (10 V or 20 mA) in n41 as percentage based on the maximum frequency as 100%.
Set the frequency of minimum analog input (0 V, 0 mA, or 4 mA) in n42 as percentage based on the maximum frequency as 100%.
|
Value |
Name |
Setting |
Unit of |
Default |
|
range |
setting |
settings |
||
|
n41 |
Frequency Reference |
0 to 255 |
1% |
100 |
|
Gain |
||||
|
n42 |
Frequency Reference |
–99 to 99 |
1% |
0 |
|
Bias |
Analog Frequency Reference Filter Time Setting (n43)
The digital filter with a first-order lag can be set for analog frequency references to be input.
|
Value |
Name |
Setting |
Unit of |
Default |
|
range |
setting |
settings |
||
|
n43 |
Analog Frequency Refer- |
0.00 to 2.00 |
0.01 s |
0.10 |
|
ence Filter Time |
Analog Monitor Output Setting (n44)
Set a monitored item for analog monitor output.
0Output frequency (Reference: 10 V at max. frequency)
1Output current (Reference: 10 V with rated output current)
Note: The values in parentheses are applicable when n45 is set to 1.00.
Analog Monitor Output Gain Setting (n45)
Set the output characteristics of analog monitor output.
|
Value |
Name |
Setting |
Unit of |
Default |
|
range |
setting |
settings |
||
|
n45 |
Analog Monitor Output |
0.00 to 2.00 |
0.01 |
1.00 |
|
Gain |
17
 Loading…
Loading…
You can only view or download manuals with
Sign Up and get 5 for free
Upload your files to the site. You get 1 for each file you add
Get 1 for every time someone downloads your manual
Buy as many as you need
Omron Sysdrive 3G3JV Series
Compact Simplified Inverter
User’s Manual
Язык: английский
Формат: PDF
�?нструкция по эксплуатации на частотники Omron серии 3G3JV.
This manual describes the functions of the product and relations with other products. The product contains potentially dangerous parts under the cover. Do not attempt to open the cover under any circumstances. Doing so may result in injury or death and may damage the product. Never attempt to repair or disassemble the product. We recommend that you add the following precautions to any instruction manuals you prepare for the system into which the product is being installed.
Table of Contents:
Chapter 1. Overview
1-1 Function.
1-2 Nomenclature.
Chapter 2. Design
2-1 Installation.
2-1-1 Dimensions
2-1-2 Installation Conditions
2-2 Wiring
2-2-1 Removing and Mounting the Covers
2-2-2 Terminal Block.
2-2-3 Standard Connections
2-2-4 Wiring around the Main Circuit
2-2-5 Wiring Control Circuit Terminals.
2-2-6 Conforming to EC Directive.
Chapter 3. Preparing for Operation and Monitoring.
3-1 Nomenclature.
3-2 Outline of Operation
Chapter 4. Test Run
4-1 Procedure for Test Run
4-2 Operation Example
Chapter 5. Basic Operation
5-1 Initial Settings
5-2 V/f Control.
5-3 Setting the Local/Remote Mode
5-4 Selecting the Operation Command
5-5 Setting the Frequency Reference
5-5-1 Selecting the Frequency Reference
5-5-2 Upper and Lower Frequency Reference Limits
5-5-3 Adjusting the Analog Input
5-5-4 Setting Frequency References through Key Sequences
5-6 Setting the Acceleration/Deceleration Time.
5-7 Selecting the Reverse Rotation-prohibit
5-8 Selecting the Interruption Mode
5-9 Multi-function I/O.
5-9-1 Multi-function Input.
5-9-2 Multi-function Output
5-10 Analog Monitor Output.
Chapter 6. Advanced Operation
6-1 Setting the Carrier Frequency
6-2 DC Injection Braking Function.
6-3 Stall Prevention Function
6-4 Overtorque Detection Function.
6-5 Torque Compensation Function.
6-6 Slip Compensation Function.
6-7 Other Functions.
6-7-1 Motor Protection Characteristics (n33 and n34)
6-7-2 Cooling Fan Operation Function (n35)
6-7-3 Momentary Power Interruption Compensation (n47)
6-7-4 Fault Retry (n48)
6-7-5 Frequency Jump Function (n49 to n51)
6-7-6 Frequency Detection Function.
6-7-7 UP/DOWN Command Frequency Memory (n62)
6-7-8 Error History (n78)
Chapter 7. Communications
7-1 RS-422/485 Communications Unit
7-1-1 Overview
7-1-2 External Dimensions.
7-1-3 Names of Parts
7-1-4 Mounting Procedure.
7-2 Inverter Settings.
7-2-1 Setting the Communications Conditions
7-2-2 Operation Command Selection (n02)
7-2-3 Frequency Reference Input Selection (n03).
7-2-4 Setting the Multi-function Inputs (n36 to n39)
7-3 Message Communications Basic Format
7-4 DSR Message and Response.
7-4-1 Data Read (Function Code: 03 Hex)
7-4-2 Data Write/Broadcast Data Write (Function Code: 10 Hex)
7-4-3 Loop-back Test (Function Code: 08 Hex)
7-5 Enter Command.
7-6 Setting the Communications Data.
7-7 Register Number Allocations in Detail.
7-7-1 I/O Function
7-7-2 Monitor Functions.
7-8 Communications Error Codes
7-9 Self-diagnostic Test
7-10 Communications with Programmable Controller.
7-10-1 Available Programmable Controllers and Peripheral Devices.
7-10-2 Wiring the Communications Line
7-10-3 Outline of Protocol Macro Function.
7-10-4 Creating a Project File
7-10-5 Ladder Program
7-10-6 Communications Response Time.
Chapter 8. Maintenance Operations
8-1 Protective and Diagnostic Functions.
8-1-1 Fault Detection (Fatal Error)
8-1-2 Warning Detection (Nonfatal Error).
8-2 Troubleshooting.
8-2-1 Parameters Fail Set
8-2-2 Motor Fails to Operate
8-2-3 Motor Rotates in the Wrong Direction.
8-2-4 Motor Outputs No Torque or Acceleration is Slow.
8-2-5 Motor Deceleration is Slow
8-2-6 Motor Burns
8-2-7 Controller or AM Radio Receives Noise when Inverter is Started
8-2-8 Ground Fault Interrupter is Actuated when Inverter is Started
8-2-9 Mechanical Vibration
8-2-10 Motor Rotates after Output of Inverter is Turned Off.
8-2-11 Detects OV when Motor Starts and Motor Stalls.
8-2-12 Output Frequency Does Not Reach Frequency Reference
8-2-13 Inverter Does Not Run Because EF (Simultaneous Input of Forward and Reverse Commands) is Detected, or Motor Rotates Momentarily While Control Device Power is OFF.
8-3 Maintenance and Inspection
Chapter 9. Specifications
9-1 Inverter Specifications
9-2 Specifications of Accessories
9-2-1 List of Accessories
9-2-2 Adapter Panel
9-2-3 RS-422/485 Communications Unit
9-2-4 Fan Unit
9-2-5 Scaling Meter
9-2-6 Digital Operator
9-2-7 Digital Operator Case
9-2-8 Digital Operator Connection Cable
9-2-9 DC Reactor
9-2-10 DIN Track Mounting Bracket
9-2-11 AC Reactor
9-3 Option Specifications
9-3-1 EMC-compatible Noise Filter
9-3-2 Simple Input Noise Filter.
9-3-3 Output Noise Filter
Chapter 10. List of Parameters
Chapter 11. Using the Inverter for a Motor.
Revision History.
ВН�?МАН�?Е!
Вся информация, которая размещается на сайте носит ознакомительный характер. Мы стремимся к тому, чтобы Вы получали только достоверную, максимально полную и точную информацию. Но мы не исключаем, что некоторая информация может со временем утратить свою актуальность, допускаем возможность ошибок в содержании.
�?нформация на сайте размещается в исходном виде. Мы не даем гарантии на полноту и актуальность информации. �?нформация предоставляется также без каких-либо других явно или неявно выраженных или предполагаемых гарантий.
Администрация сайта не несет ответственности за информацию, предоставленную пользователями. Администрация сайта оставляет за собой право, не уведомляя пользователей и посетителей ресурса, вносить изменения в контент.
На сайте есть ссылки на сторонние ресурсы (сайты), на которые мы не имеем никакого влияния. Ссылки на другие ресурсы предназначены для того, чтобы пользователю было удобнее искать информацию по схожей тематике. Мы не несем ответственности за содержание других сайтов (контент), за их доступность пользователям.
Нет и не может быть таких обстоятельств, при которых владелец (администрация) сайта будет нести какую-либо ответственность перед какой-либо стороной за прямой, непрямой или косвенно причиненный ущерб из-за использования информации, находящейся на страницах этого сайта, или информации на том сайте, на который имеется гиперссылка с этого ресурса. Ни при каких обстоятельствах мы не будем нести ответственность за возможную, но упущенную выгоду, потерю программ или данных, приостановку вашей хозяйственной деятельности и в аналогичных случаях, даже если будем явно проинформированы о большой вероятности подобного ущерба.
�?нтернет не обеспечивает надежной защиты данных и информации, поэтому не несет и не может нести ответственность за информацию, которую получают пользователи из �?нтернета.
Посещая данный сайт и используя его контент в своих целях, Вы прямо выражаете свое согласие с данным «Отказом от ответственности» и принимаете всю ответственность на себя.
Администрация сайта в любое время может и имеет право вносить изменения в эти правила. Они вступают в силу безотлагательно с этого момента. Если Вы продолжаете пользоваться сайтом после того, как в «Отказ от ответственности» внесены изменения, значит — Вы автоматически согласились на соблюдение обновленных правил.
Владельцы и создатели данного ресурса не несут ответственности за содержание ссылок, за их использование и за информацию, размещенную на данном сайте, как не несут ответственность за игнорирование пользователями коммерческого статуса того программного обеспечения, на которое ведут ссылки с этого сайта.
Авторское право и право на товарный знак
Мы стремимся соблюдать авторские права других собственников и использовать собственные или не требующие лицензирования материалы. Загрузка и копирование текстовых материалов, изображений, фотографий или иных файлов с нашего сайта допускается только для личного, некоммерческого использования. Поскольку содержимое этого раздела сайта создается из открытых общедоступных и бесплатных источников. Если вам стало известно об авторском праве на какой-либо материал на сайте, пожалуйста, сообщите нам. После уведомления о нарушениях, мы удалим такое содержимое немедленно.
- Высокая эффективность
- Высокий пусковой момент
- Широкий круг применения
- Векторное управление без датчика обратной связи при частоте 0 Гц
- Функция аварийного выключения
- Встроенная схема торможения
- Функция подхвата вращающегося электродвигателя
- Управляемое торможение при пропадании сетевого напряжения
- Удобство в использовании
- Соответствие стандартам безопасности
- Директива RoHS
Стандартная схема подключения
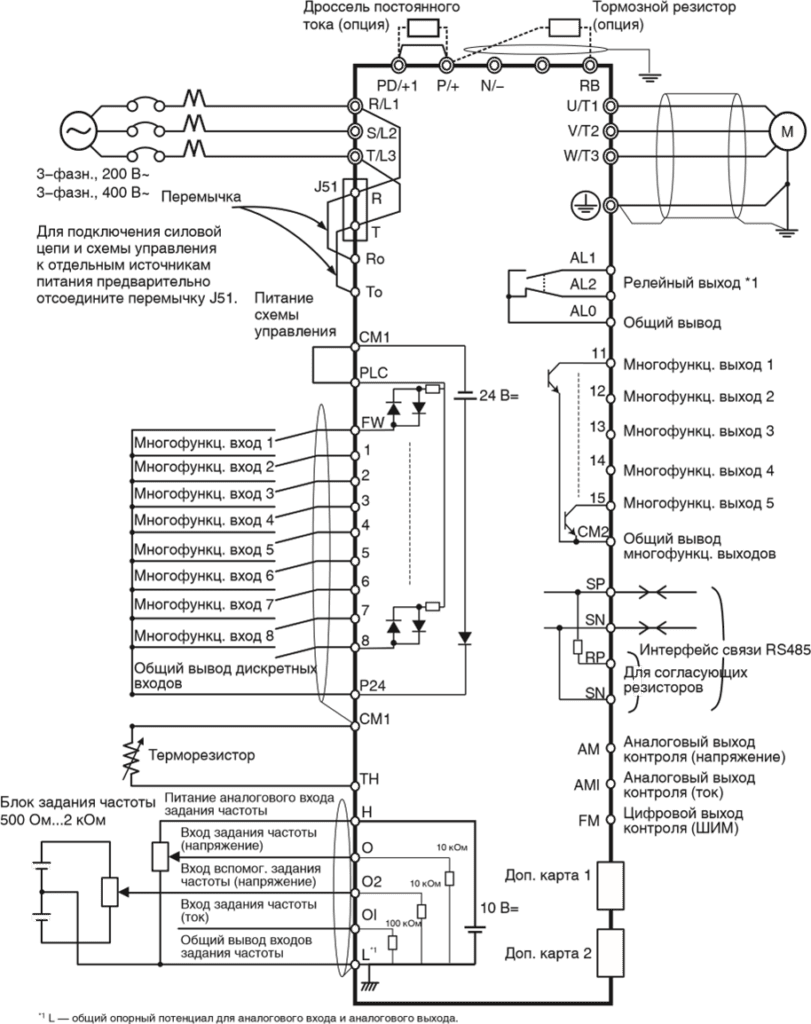
Клеммы силовых цепей.
| Обозначения клемм | Название клеммы | Описание |
| R/L1, S/L2, T/L3 | Клеммы ввода электропитания | Служат для подключения преобразователя частоты к источнику электропитания. |
| U/T1,V/T2, W/T3 | Клеммы питания электродвигателя | Служат для подключения к 3-фазному электродвигателю. |
| PD/+1, P/+ | Клеммы для внешнего дросселя постоянного тока | Отсоедините перемычку от клемм PD/+1 и P/+ и подключите дополнительный дроссель постоянного тока для повышения коэффициента мощности. |
| P/+, RB | Клеммы для подключения тормозного резистора | Служат для подключения дополнительного наружного тормозного резистора. (Клемма RB предусмотрена в преобразователях мощностью 22 кВт и ниже.) |
| P/+, N/- | Клеммы для подключения блока генераторного торможения | Служат для подключения дополнительных блоков генераторного торможения. |
| G |
Клемма заземления | Клемма для заземления корпуса преобразователя частоты. Подсоедините эту клемму к цепи заземления (типа D для класса 200 В, типа C для класса 400 В) |
Пункты меню режима дополнительной настройки
Для перехода между пунктами меню дополнительной настройки используйте клавиши ![]()
или
![]()
.
| Параметр | Содержание | Диапазон настройки | По умолчанию |
| Язык (Language) | Язык дисплея | 01: Английский 02: Немецкий 03: Французский 04: Испанский 05: Итальянский 06: Португальский 07: Японский 08: Китайский 09: Турецкий 10: Русский |
01 |
| Дата и время (Date and Time) | Установка даты и времени часов цифровой панели с ЖК-дисплеем | Дата: 2000/1/1…2099/12/31 Время: 00:00…23:59 Формат: 1, 2, 3 | 2009/01/01 00:00 1 |
| Запрет чтения (Read Lock) | Чтобы значения параметров, хранящиеся в памяти цифровой панели с ЖК-дисплеем, не могли быть изменены, выберите значение «Enable» (Включено) для параметра «Read lock». | 01: Включено (Enable) 02: Выключено (Disable) | 02 |
| Выбор модели ПЧ (INV Type Select) | Укажите серию используемого преобразователя частоты в данном параметре. В случае ввода неверного значения автоматически отобразится ошибка связи (COM ERROR). | 01: Модель 1 (MX2, LX, RX) (Type 1) 02: Модель 2 (JX) (Type 2) |
01 |
| Режим хранения для чтения/записи (R/W Storage Mode) | Данный параметр задает количество хранимых наборов параметров для режимов чтения (READ) и записи (WRITE). | 01: Один (Single) 02: Четыре (Quad) |
02 |
| Автоматическое выключение подсветки (Backlight Auto-Off) | Если в течение 1 минуты ни одна из клавиш цифровой панели не оказывается нажатой, задняя подсветка ЖК-дисплея гаснет. При нажатии любой клавиши подсветка вновь включается. Функция автоматического выключения задней подсветки не действует при возникновении аварийного отключения. | 01: Выключена (Off) 02: 1 минута (1 minute) |
01 |
| Backlight Flicker (Мигание подсветки) | Данный параметр позволяет разрешить или запретить свечение подсветки оранжевым цветом. | 01: Включено (Enable) 02: Выключено (Disable) |
01 |
| Сброс панели управления (Operator Reset) | Данная функция позволяет вернуть параметры цифровой панели с ЖК-дисплеем к принимаемым по умолчанию значениям. Сбрасываются значения следующих параметров: 1: Язык: Английский 2: Дата и время: 2009/01/01 ЧТВ 00:00 3: Формат времени: 01:ГГ/ММ/ДД 4: Запрет чтения: Выключено 5: Режим хранения для чтения/записи: Четыре 6: Автоматическое выключение задней подсветки: Выключена 7: Мигание подсветки: Включено После инициализации параметров необходимо установить правильные значения даты и времени. | 01: Да (YES) 02: Нет (NO) | 02 |
| Режим проверки (Check Mode) | В этом режиме можно проверить работоспособность светодиодных индикаторов, клавиш и т. п. | Проверка клавиш и светодиодов (Key&Led Check), проверка ЖКД (LCD Check), проверка ЭСППЗУ (EEPROM Check), проверка часов (RTC Check), проверка связи (Serial Loopback), режим отладки (Debug Mode), версия прошивки (Firmware Version). | — |
Список параметров для программирования
Режим настройки основных функций
| Номер параметра | Название функции | Диапазон настройки или контроля значений | Значение по умолчанию | Изменение во время работы | Ед. изм. |
| F001 | Установка/ контроль выходной частоты | 0,0/начальная частота…макс. частота двигателя 1/2/3 0,00…400,00 | 0,00 | Да | Гц |
| F002 | Время разгона 1 | 0,01…3600,00 | 10,00 | Да | с |
| d001 | Контроль выходной частоты | 0,00…400,00 | ⎯ | Да | Гц |
| d002 | Контроль выходного тока | 0,0…9999,0 | ⎯ | ⎯ | А |
| d003 | Контроль направления вращения | FWD: Прямое направление STOP: Стоп REV: Обратное направление | ⎯ | ⎯ | ⎯ |
| d004 | Контроль обратной связи ПИД-регулятора | 0,00…999000,00 (Отображается, если включена функция ПИДрегулирования) | ⎯ | ⎯ | ⎯ |
| d005 | Контроль многофункциональных входов | ⎯ | ⎯ | ⎯ | |
| d006 | Контроль многофункциональных выходов | ⎯ | ⎯ | ⎯ | |
| d007 | Контроль выходной частоты (после преобразования) | 0,00…39960,00 (Выходная частота x масштабный коэффициент (b086)) | ⎯ | Да | ⎯ |
| d008 | Контроль фактической частоты | -400,00…400,00 | ⎯ | ⎯ | Гц |
| d009 | Контроль задания момента | -200…200 | ⎯ | ⎯ | % |
| d010 | Контроль смещения момента | -200…200 | ⎯ | ⎯ | % |
| d012 | Контроль выходного момента | -200…200 | ⎯ | ⎯ | % |
| d013 | Контроль выходного напряжения | 0,0…600,0 | ⎯ | ⎯ | В |
Режим контроля
| Номер параметра | Название функции | Диапазон настройки или контроля значений | Значение по умолчанию | Изменение во время работы | Ед. изм. |
| d014 | Контроль входной мощности | 0,0…999,9 | ⎯ | ⎯ | Вт |
| d015 | Контроль потребленной энергии (кВт-ч) | 0,0…999999,9 | ⎯ | ⎯ | ⎯ |
| d016 | Контроль времени наработки в режиме «Ход» | 0…999999 | ⎯ | ⎯ | час |
| d017 | Контроль времени наработки при включенном питании | 0…999999 | ⎯ | ⎯ | час |
| d018 | Контроль температуры радиатора | -020, …200,0 | ⎯ | ⎯ | °C |
| d019 | Контроль температуры двигателя | -020, …200,0 | ⎯ | ⎯ | °C |
| d022 | Контроль продолжительности службы | ⎯ | ⎯ | ⎯ | |
| d023 | Контроль счетчика программы | 0…1024 | ⎯ | ⎯ | ⎯ |
| d024 | Контроль номера программы | 0…9999 | ⎯ | ⎯ | ⎯ |
| d025 | Контрольный параметр программирования привода (UM0) | -2147483647…2147483647 | ⎯ | ⎯ | ⎯ |
| d026 | Контрольный параметр программирования привода (UM1) | -2147483647…2147483647 | ⎯ | ⎯ | ⎯ |
| d027 | Контрольный параметр программирования привода (UM2) | -2147483647…2147483647 | ⎯ | ⎯ | ⎯ |
| d028 | Контроль счетчика импульсов | 0…2147483647 | ⎯ | ⎯ | ⎯ |
| d029 | Контроль задания положения | -1 073 741 823…1 073 741 823, если выбран режим HAPR -268 435 456…268 435 456, если выбран режим APR2 | ⎯ | ⎯ | ⎯ |
| d030 | Контроль текущего положения | -1 073 741 823…1 073 741 823, если выбран режим HAPR -268 435 456…268 435 456, если выбран режим APR2 | ⎯ | ⎯ | ⎯ |
| d031 | Часы | Установка даты и времени для цифровой панели управления с ЖК-дисплеем | ⎯ | ⎯ | ⎯ |
| d060 | Контроль режима работы ПЧ | 00…01 | ⎯ | ⎯ | ⎯ |
| d080 | Контроль количества аварийных отключений | 0…65535 | ⎯ | ⎯ | раз |
| d081 d082 d083 d084 d085 d086 | Контроль аварийных отключений 1 (последнее отключение) Контроль аварийных отключений 2 Контроль аварийных отключений 3 Контроль аварийных отключений 4 Контроль аварийных отключений 5 Контроль аварийных отключений 6 |
Код ошибки (условия при возникновении) →Выходная частота [Гц] → Выходной ток [A] →Напряжение шины пост. тока [В] →Общее время работы в режиме «Ход» [ч] →Общее время работы [ч] | ⎯ | ⎯ | ⎯ |
| d090 | Контроль состояния предупреждения | Код предупреждения 0…385 | ⎯ | ⎯ | ⎯ |
| d102 | Контроль напряжения постоянного тока | 0,0…999,9 | ⎯ | ⎯ | В |
| d103 | Контроль коэффициента нагрузки тормозного резистора | 0,0…100,0 | ⎯ | ⎯ | % |
| d104 | Контроль электронной тепловой защиты | 0,0…100,0 | ⎯ | ⎯ | % |
Параметры работы с двигателем
| F202 | * Время разгона 1 двигателя 2 | 0,01…3600,00 | 10,00 | Да | с |
| F302 | * Время разгона 1 двигателя 3 | 0,01…3600,00 | 10,00 | Да | с |
| F003 | Время торможения 1 | 0,01…3600,00 | 10,00 | Да | с |
| F203 | * Время торможения 1 двигателя 2 | 0,01…3600,00 | 10,00 | Да | с |
| F303 | * Время торможения 1 двигателя 3 | 0,01…3600,00 | 10,00 | Да | с |
| F004 | Выбор направления вращения для управления с панели | 00: Прямое (FWD) 01: Обратное (REV) | 00 | Нет | ⎯ |
| H002/H202 | Выбор параметров двигателя | 00: Стандартные параметры двигателя 01: Параметры автонастройки 02: Параметры автонастройки (включена оперативная автонастройка) | 00 | ⎯ |
| H003/H203 | Выбор мощности двигателя | 0,20…160,00 | Заводск. предуст. | кВт |
| H004/H204 | Выбор числа полюсов двигателя | 2/4/6/8/10 | 4 | Полюс |
| H030/H230 | Параметр R1 двигателя (значение для автонастройки) | 0,001…65,535 | Зависит от мощности двигателя. | ⎣ |
| H031/H231 | Параметр R2 двигателя (значение для автонастройки) | 0,001…65,535 | Зависит от мощности двигателя. | Ом |
| H032/H232 | Параметр L двигателя (значение для автонастройки) | 0,01…655,35 | Зависит от мощности двигателя. | мГн |
| H033/H233 | Параметр Io двигателя (значение для автонастройки) | 0,01…655,35 | Зависит от мощности двигателя. | А |
| H034/H234 | Параметр J двигателя (значение для автонастройки) | 0,001…9999,000 | Зависит от мощности двигателя. | кг*м2 |
| A003 | Основная частота | 30…макс. частота | 50 | Гц |
| A051 | Выбор торможения постоянным током | 00: Отключено (OFF) 01: Включено (ON) 02: Включено, когда частота < A052 (ON (FQ)) |
01 | ⎯ |
| A082 | Выбор напряжения для функции AVR | 200/215/220/230/240: значения для класса 200 В 380/400/415/440/460/480: значения для класса 400 В | 200/400 | ⎯ |
Расширенные функции
| Номер параметра | Название функции | Диапазон настройки или контроля значений | Значение по умолчанию | Изменение во время работы | Ед. изм. |
| A001 | Выбор способа ввода задания частоты | 00: Потенциометр FREQ на цифровой панели управления (VR) (Возможно только при использовании 3G3AX-OP01.) 01: Клемма 02: Цифровая панель управления (F001) 03: Интерфейс ModBus (RS485) 04: Дополнительная карта 1 05: Дополнительная карта 2 06: Импульсный вход задания частоты 07: Программирование привода (EzSQ) 10: Результат математической операции (Math) |
01 | Нет | — |
| A002 | Выбор способа подачи команды «Ход» | 01: Клемма 02: Цифровая панель управления (F001) 03: Интерфейс ModBus (RS485) 04: Дополнительная карта 1 05: Дополнительная карта 2 |
01 | Нет | ⎯ |
| A003 A203 A303 |
Основная частота * Основная частота двигателя 2 * Основная частота двигателя 3 |
30…максимальная частота [A004] 30…максимальная частота двигателя 2 [A204] 30…максимальная частота двигателя 3 [A304] |
50 50 50 |
Нет | Гц |
| A004 A204 A304 |
Максимальная частота *Максимальная частота двигателя 2 *Максимальная частота двигателя 3 | A003…400 A203…400 A303…400 |
50 50 50 |
Нет | Гц |
| A005 | Выбор входов O/OI | 00: Переключение между входом O и входом OI с помощью клеммы AT ([O]/ [OI]) 01: Переключение между входом O и входом O2 с помощью клеммы AT ([O]/ [O2]) 02: Переключение между входом O и потенциометром FREQ с помощью клеммы AT ([O]/VR) (Возможно только при использовании 3G3AX-OP01.) 03: Переключение между входом OI и потенциометром FREQ с помощью клеммы AT ([OI]/VR) (Возможно только при использовании 3G3AX-OP01.) 04: Переключение между входом O2 и потенциометром FREQ с помощью клеммы AT ([O2]/VR) (Возможно только при использовании 3G3AX-OP01.) | 00 | Нет | ⎯ |
| A006 | Выбор входа O2 | 00: Только вход O2 [O2] 01: Вспомогательное задание частоты O/ OI-P (не реверсируемое) 02: Вспомогательное задание частоты O/ OI-PM (реверсируемое) 03: Вход O2 отключен | 03 | Нет | ⎯ |
| A011 | Минимальная частота шкалы входа O | 0,00…400,00 | 0,00 | Нет | Гц |
| A012 | Максимальная частота шкалы входа O | 0,00…400,00 | 0,00 | Нет | Гц |
| A013 | Минимальный уровень сигнала шкалы входа O | 0…100 | 0 | Нет | % |
| A014 | Максимальный уровень сигнала шкалы входа O | 0…100 | 100 | Нет | % |
| A015 | Выбор начальной частоты для входа O | 00: Минимальная частота шкалы (значение в A011) 01: 0 Гц | 01 | Нет | ⎯ |
| A016 | Интервал опроса O, O2, OI | 1…30 31 (постоянная фильтра 500 мс, гистерезис ± 0,1 Гц) | 31 | Нет | ⎯ |
| A017 | Выбор программирования привода (EzSQ) | 0: Выключено 1: Запуск программы [PRG] 2: Всегда включено | 00 | Нет | ⎯ |
| A019 | Выбор ступенчатого переключения скорости | 00: Двоичный: выбор 16-ти ступеней с помощью 4 входов 01: Битовый: выбор 8-ми ступеней с помощью 7 входов | 00 | Нет | ⎯ |
| A020 | Задание ступенчатого переключения скорости 0 | 0,00…макс. частота [A004] | 6,00 | Да | Гц |
| A220 | *Задание ступенчатого переключения скорости 0 двигателя 2 | 0,00…макс. частота [A204] | 6,00 | Да | Гц |
| A320 | *Задание ступенчатого переключения скорости 0 двигателя 3 | 0,00…макс. частота [A304] | 6,00 | Да | Гц |
| A038 | Частота толчкового хода | 0,00/Начальная частота…9,99 | 6,00 | Да | Гц |
| A039 | Выбор способа остановки толчкового хода | 00: Выбег в толчковом режиме, отключено во время работы (FRS) 01: Торможение до остановки в толчковом режиме, отключено во время работы (DEC) 02: Торможение постоянным током в толчковом режиме, отключено во время работы (DB) 03: Выбег в толчковом режиме, включено во время работы (FRS (RUN)) 04: Торможение до остановки в толчковом режиме, включено во время работы (DEC (RUN)) 05: Торможение постоянным током в толчковом режиме, включено во время работы (DB (RUN)) | 04 | Нет | ⎯ |
| A051 | Выбор торможения постоянным током | 00: Отключено (OFF) 01: Включено (ON) 02: Включено, когда частота < A052 (ON (FQ)) | 01 | Нет | ⎯ |
| A052 | Частота начала торможения постоянным током | 0,00…400,00 | 0,50 | Нет | Гц |
| A053 | Время задержки торможения постоянным током | 0,0…5,0 | 0,0 | Нет | с |
| A054 | Сила торможения постоянным током | 0…100 (0,4…55 кВт) 0…80 (75…132 кВт) |
50 40 | Нет | % |
| A055 | Продолжительность торможения постоянным током | 0,0…60,0 | 0,5 | Нет | с |
| A056 | Выбор способа запуска торможения постоянным током | 00: Управление фронтом сигнала 01: Управление уровнем сигнала | 01 | Нет | ⎯ |
| A057 | Сила торможения постоянным током при запуске | 0…100 (0,4…55 кВт) 0…80 (75…132 кВт) | 0 | Нет | % |
| A058 | Продолжительность торможения постоянным током при запуске | 0,0…60,0 | 0,0 | Нет | с |
| A059 | Несущая частота при торможении постоянным током | 0,5…15,0 (0,4…55 кВт) 0,5…10,0 (75…132 кВт) |
5,0 3,0 | Нет | кГц |
| A061 A261 | Верхнее предельное значение частоты *Верхнее предельное значение частоты для двигателя 2 | 0,00/нижнее предельное значение частоты…макс. частота 0,00/нижнее предельное значение частоты для двигателя 2…макс. частота для двигателя 2 | 0,00 | Нет | Гц |
| A062 A262 | Нижнее предельное значение частоты *Нижнее предельное значение частоты для двигателя 2 | 0,00/начальная частота…верхнее предельное значение частоты 0,00/начальная частота…верхнее предельное значение частоты для двигателя 2 | 0,00 | Нет | Гц |
| A063 A064 A065 A066 A067 A068 | Частота пропуска 1 Ширина полосы частот пропуска 1 Частота пропуска 2 Ширина полосы частот пропуска 2 Частота пропуска 3 Ширина полосы частот пропуска 3 |
Центральная частота пропуска: 0,0…400,0 Ширина полосы частот (гистерезис) пропуска: 0,0…10,0 | 0,00 0,50 0,00 0,50 0,00 0,50 | Нет | Гц |
| A069 | Частота приостановки разгона | 0,00…400,00 | 0,00 | Нет | Гц |
| A070 | Время приостановки разгона | 0,0…60,0 | 0,0 | Нет | с |
| A071 | Выбор ПИДрегулирования | 00: Отключено (OFF) 01: Включено (ON (+)) 02: Включено, разрешен реверс выхода (ON (+/-)) | 00 | Нет | ⎯ |
| A072 | Коэффициент передачи П-звена ПИД-регулятора | 0,2…5,0 | 1,0 | Да | ⎯ |
| A073 | Коэффициент передачи И-звена ПИД-регулятора | 0,0…3600,0 | 1,0 | Да | с |
| A074 | Коэффициент передачи Д-звена ПИД-регулятора | 0,00…100,00 | 0,00 | Да | с |
| A075 | Масштабный коэффициент ПИДрегулятора | 0,01…99,99 | 1,00 | Нет | раз |
| A076 | Выбор входа сигнала обратной связи ПИДрегулятора | 00: Вход OI 01: Вход O 02: Интерфейс связи RS485 (Modbus) 03: Вход импульсной последовательности (Pulse) 10: Результат математической операции (Math) | 00 | Нет | ⎯ |
| A077 | Работа ПИДрегулятора в обратном направлении | 00: Рассогласование = уставка — значение сигнала обратной связи (OFF) 01: Рассогласование = значение сигнала обратной связи — уставка (ON) | 00 | Нет | ⎯ |
| A078 | Ограничение выхода ПИДрегулятора | 0,0…100,0 | 0,0 | Нет | % |
| A079 | Выбор входа управления с упреждением ПИДрегулятора | 00: Выключено 01: Вход O 02: Вход OI 03: Вход O2 | 00 | Нет | ⎯ |
| A081 | Выбор функции AVR | 00: Всегда включено 01: Всегда выключено 02: Выключено при торможении | 02 | Нет | ⎯ |
| A082 | Выбор напряжения для функции AVR | Класс 200 В: 200/215/220/230/240 Класс 400 В: 380/400/415/440/460/480 | 200/ 400 | Нет | В |
| A092 A292 A392 A093 A293 A393 | Время разгона 2 * Время разгона 2 двигателя 2 * Время разгона 2 двигателя 3 Время торможения 2 * Время торможения 2 двигателя 2 * Время торможения 2 двигателя 3 |
0,01…3600,00 | 10,00 10,00 10,00 10,00 10,00 10,00 | Да | с |
| A094 A294 | Выбор способа переключения на темп разгона/ торможения 2 *Выбор способа переключения на темп разгона/ торможения 2 для двигателя 2 | 00: С помощью многофункционального входа 09 (2CH) 01: По достижении заданной частоты (Preset FQ) 02: Только при переключении направления (прямое/обратное) (FWD-REV) | 00 00 | Нет | ⎯ |
| A095 A295 A096 A296 | Частота переключения на темп разгона 2 Частота переключения на темп разгона 2 для двигателя 2 Частота переключения на темп торможения 2 Частота переключения на темп торможения 2 для двигателя 2 |
0,00…400,00 | 0,00 0,00 0,00 0,00 | Нет | Гц |
| A097 A098 | Выбор профиля разгона Выбор профиля торможения | 00: Линейный профиль 01: S-профиль 02: U-профиль 03: Обращенный U-профиль 04: EL-S-профиль | 01 01 |
Нет | ⎯ |
| A141 A142 | Выбор входа A задания частоты Выбор входа B задания частоты | 00: Цифровая панель управления (F001) (Operator) 01: Потенциометр FREQ на цифровой панели управления (VR) (Возможно только при использовании 3G3AX-OP01.) 02: Вход O (O) 03: Вход OI (OI) 04: Интерфейс связи RS485 (Modbus) 05: Дополнительная карта 1 06: Дополнительная карта 2 07: Вход импульсной последовательности (Pulse) | 02 03 | Нет Нет | ⎯ |
| A143 | Выбор математической операции | 00: Сложение (A + B) (ADD) 01: Вычитание (A — B) (SUB) 02: Умножение (A x B) (MUL) | 00 | Нет | ⎯ |
| A145 | Поправка частоты | 0,00…99,99 100,0…400,0 | 0,00 | Нет | Гц |
| A146 | Выбор знака поправки частоты | 00: Добавление значения A145 к выходной частоте (ADD) 01: Вычитание значения A145 из выходной частоты (SUB) | 00 | Нет | ⎯ |
| A150 | Показатель кривизны EL-Sпрофиля в точке 1 во время разгона | 0…50 | 10 | Нет | % |
| A151 | Показатель кривизны EL-Sпрофиля в точке 2 во время разгона | 0…50 | 10 | Нет | % |
| A152 | Показатель кривизны EL-Sпрофиля в точке 1 во время торможения | 0…50 | 10 | Нет | % |
| A153 | Показатель кривизны EL-Sпрофиля в точке 2 во время торможения | 0…50 | 10 | Нет | % |
Список кодов ошибок Omron 3G3RX
| Название | Описание | Код ошибки | Возможные причины и способы устранения |
| Аварийное отключение из-за повышенного тока | Если вращению двигателя препятствуют внешние механические силы (заблокирован вал и т. п.), либо скорость вращения изменяется слишком быстро (в сторону увеличения или уменьшения), через преобразователь частоты протекает ток большой силы, что приводит к возникновению неисправности. Если ток становится больше установленного порогового уровня, выход ПЧ отключается и сигнализируется ошибка. Данная функция защиты распознает повышенный ток с помощью детектора переменного тока (CT). Схема защиты срабатывает и обесточивает выход ПЧ, если выходной ток приблизительно в 2,2 раза (220%) превосходит номинальный выходной ток ПЧ. | E01.0 E02.0 E03.0 E04.0 | Резко изменился уровень нагрузки. (Не допускать резкие перепады нагрузки.) Короткое замыкание в выходной цепи. (Проверить кабель питания двигателя.) Имеется замыкание на землю. (Проверить кабель питания двигателя и сам двигатель.) Слишком высокий темп торможения. (Увеличить время торможения.) Слишком высокий темп разгона. (Увеличить время разгона.) Заблокирован вал двигателя. (Проверить двигатель и кабель.) Слишком высокий «подъем» момента. (Уменьшить величину «подъема» момента.) Избыточное торможение постоянным током. (Уменьшить торможение постоянным током.) Неисправен детектор тока (CT). (Отремонтировать или заменить детектор тока.) |
| Аварийное отключение из-за перегрузки *1 | Контролируется выходной ток преобразователя частоты. Если функция электронной тепловой защиты обнаруживает перегрузку двигателя, выход ПЧ отключается и сигнализируется ошибка. Уровень срабатывания зависит от настройки параметров функции электронной тепловой защиты. | E05.0 | Слишком большая нагрузка. (Уменьшить коэффициент нагрузки.) Неправильно задан уровень срабатывания электронной тепловой защиты. (Задать подходящий уровень срабатывания тепловой защиты.) Примечание. Функция электронной тепловой защиты легко настраивается для работы при частоте вращения 5 Гц и ниже. При работе на высокоинерционную нагрузку функция защиты от перегрузки может срабатывать в начале разгона, так как высокий момент инерции нагрузки препятствует разгону. Если это происходит, следует увеличить величину «подъема» момента или принять другие меры для устранения этой ситуации. |
| Аварийное отключение из-за перегрузки тормозного резистора | Если коэффициент использования тормозного резистора превышает значение, заданное параметром b090, выход ПЧ отключается и сигнализируется ошибка. | E06.0 | Слишком высокий темп торможения. (Увеличить время торможения.) Высокая частота пусков/остановов. (Уменьшить частоту пусков/остановов.) Установлено слишком низкое значение коэффициента использования тормозного резистора (b090). (Задать подходящее значение.) Примечание. Также необходимо учитывать допустимую мощность рассеяния резистора. |
| Аварийное отключение из-за повышенного напряжения | Слишком высокое напряжение постоянного тока между полюсами P/+ и N/- может привести к повреждениям. Поэтому данная функция защиты отключает выход ПЧ и сигнализирует ошибку, если напряжение постоянного тока между полюсами P/+ и N/- становится больше установленного порогового уровня из-за возврата энергии двигателем в генераторном режиме или повышения входного напряжения во время работы. Отключение происходит, когда напряжение между полюсами P/+ и N/- достигает приблизительно 400 В= (для моделей класса 200 В) или 800 В= (для моделей класса 400 В). | E07.0 | Слишком высокий темп торможения. (Увеличить время торможения.) Имеется замыкание на землю. (Проверить кабель питания двигателя и сам двигатель.) Двигатель вращается/приводится в движение под действием внешней силы на стороне нагрузки. (Уменьшить энергию, генерируемую двигателем.) |
| Ошибка ЭСППЗУ *2 *3 |
Если из-за воздействия помех или нарушения температурного режима возникает ошибка в работе встроенной микросхемы ЭСППЗУ, выход преобразователя частоты отключается и сигнализируется ошибка. Примечание. В некоторых случаях вместо ошибки ЭСППЗУ может сигнализироваться ошибка центрального процессора. |
E08.0 | Поблизости есть источник электрических помех большой мощности. (Принять меры против электрических помех.) Снизилась эффективность охлаждения. (Проверить охлаждающий вентилятор и радиатор и очистить их при необходимости.) (Заменить охлаждающий вентилятор, если он неисправен.) |
| Аварийное отключение из-за пониженного напряжения | Если напряжение питающей электросети становится меньше установленного порогового уровня, выход преобразователя частоты отключается. Это вызвано тем, что при слишком низком напряжении на входе преобразователя частоты перестает работать схема управления. Отключение происходит, когда напряжение постоянного тока между полюсами P/+ и N/- снижается приблизительно до 175 В= (для моделей класса 200 В) или 345 В= (для моделей класса 400 В). | E09.0 | Понизилось входное напряжение. (Проверить напряжение питающей электросети.) Недостаточная мощность источника питания. (Проверить тех. характеристики источника питания.) Поврежден тиристор внутренней схемы плавного заряда. (Проверить тиристор.) |
| Ошибка CT | Если возникает ошибка в работе встроенного детектора тока (CT), выход преобразователя частоты отключается. Отключение происходит, если при поданном питании выходное напряжение CT составляет приблизительно 0,6 В или больше. | E10.0 | Неисправность в преобразователе частоты. (Выполнить ремонт или замену.) |
| Ошибка ЦПУ *1 | Если центральный процессор преобразователя частоты работает неправильно, выход преобразователя частоты отключается и сигнализируется ошибка. Примечание. В ряде случаев ошибка ЦПУ может сигнализироваться в результате считывания некорректных данных из ЭСППЗУ. | E11.0 | Поблизости есть источник электрических помех большой мощности. (Принять меры против помех.) Неисправность в преобразователе частоты. (Выполнить ремонт или замену.) |
| Внешнее отключение выхода | Если в работе внешнего оборудования или устройства возникает ошибка, на преобразователь частоты подается сигнал аварийного отключения. Выход ПЧ отключается. (Действует, только если выбрана функция внешнего отключения выхода.) | E12.0 | Включена функция внешнего отключения выхода, в работе внешнего оборудования произошла ошибка и на ПЧ был подан сигнал отключения. (Устранить ошибку во внешнем устройстве.) |
| Аварийное отключение из-за безнадзорного запуска | Если при включении питания на входе преобразователя частоты уже присутствует сигнал «Ход», выход ПЧ отключается. (Действует, только если выбрана функция защиты от безнадзорного пуска (USP)) | E13.0 | Включена функция защиты от безнадзорного пуска, питание ПЧ было включено, когда на входе ПЧ присутствовал сигнал «Ход». (Перед подачей питания выключить сигнал «Ход».) |
| Аварийное отключение из-за замыкания на землю *1 | Данная функция обеспечивает защиту преобразователя частоты при обнаружении замыкания на землю в цепи между ПЧ и электродвигателем в момент подачи питания на ПЧ. (Данная функция не работает при наличии остаточного напряжения на двигателе.) | E14.0 | Имеется замыкание на землю. (Проверить кабель питания двигателя и сам двигатель.) Ошибка или неисправность в самом ПЧ. (Отсоединить и проверить кабель питания двигателя.) Ошибка или неисправность силовой цепи. (Проверить силовую цепь. См. главу 6.) (Выполнить ремонт или замену.) |
| Аварийное отключение из-за повышенного входного напряжения | Если напряжение, поступающее на преобразователь частоты, дольше 100 секунд превышает указанное в технических характеристиках значение, в то время как ПЧ остановлен, выход ПЧ отключается. Отключение происходит, когда напряжение шины постоянного тока достигает приблизительно 390 В= (для моделей класса 200 В) или 780 В= (для моделей класса 400 В). | E15.0 | Когда ПЧ остановлен, на его вход поступает слишком высокое напряжение питания. (Уменьшить входное напряжение, устранить чрезмерные колебания напряжения. При необходимости, установить дроссель переменного тока в цепи ввода электропитания.) |
| Аварийное отключение из-за кратковременного прерывания электропитания | Если напряжение питания пропадает больше чем на 15 мс, выход преобразователя частоты отключается. Если подача электропитания прерывается надолго, это обычно воспринимается как полное отключение питания. Следует также иметь ввиду, что если выбран перезапуск двигателя, ПЧ возобновит вращение двигателя при восстановлении электроснабжения, если к тому времени все еще будет присутствовать команда «Ход». | E16.0 | Пониженное напряжение питающей электросети. (Восстановить нормальное электропитание.) Неисправен контакт АВЛК и/или ЭМК. (Заменить АВЛК и/или ЭМК.) |
| Ошибка температуры при уменьшении скорости вращения охлаждающего вентилятора | Данный код ошибки отображается, если при возникновении ошибки температуры обнаруживается снижение скорости вращения охлаждающего вентилятора. | E20.0 | Снизилась эффективность охлаждения. (Заменить охлаждающий вентилятор.) Засорилось пространство между пластинами радиатора. (Почистить радиатор.) |
| Ошибка температуры | Если температура в силовой цепи чересчур велика из-за высокой температуры окружающей среды, выход преобразователя частоты отключается. | E21.0 | ПЧ не установлен в вертикальном положении. (Проверить, как установлен ПЧ) Повышенная температура окружающей среды. (Уменьшить температуру окружающей среды.) |
| Ошибка связи с преобразовательной схемой | Если возникает ошибка при обмене данными между центральным процессором и преобразовательной схемой, выход ПЧ отключается. | E23.0 | Поблизости есть источник электрических помех большой мощности. (Принять меры противодействия электрическим помехам.) Отсоединился какой-либо кабель внутри ПЧ. (Проверить разъемы.) |
| Аварийное отключение из-за обрыва фазы | Неполнофазное питание может привести к повреждению преобразователя частоты. Если включена защита от пропадания входной фазы (b006=01), при пропадании фазы питающей сети выход ПЧ отключается. Отключение происходит, если фаза отсутствует приблизительно 1 с или дольше. | E24.0 | Обрыв одной из фаз входного напряжения. (Проверить входные цепи электропитания.) Неисправен контакт АВЛК и/или ЭМК. (Заменить АВЛК и/или ЭМК.) |
| Ошибка силовой цепи *1 | Если преобразовательная схема не может подтвердить включение/ выключение IGBT-модуля из-за отказа силового элемента, короткого замыкания в цепи нагрузки или неправильной работы вследствие воздействия излучаемых помех, выход преобразователя частоты отключается. | E25.0 | Поблизости есть источник электрических помех большой мощности. (Принять меры противодействия электрическим помехам.) Поврежден силовой элемент/IGBTмодуль. Короткое замыкание в выходной цепи. (Проверить IGBT-модуль.) Преобразователь частоты неисправен. (Выполнить ремонт или замену.) |
| Ошибка IGBTмодуля | В случае кратковременной перегрузки по току, ошибки температуры силового элемента или снижения управляющего напряжения силового элемента выход преобразователя частоты отключается с целью защиты силового элемента. (Автоматическое возобновление работы для этой ошибки не предусмотрено.) | E30.0 | Короткое замыкание в выходной цепи. (Проверить кабель питания двигателя.) Имеется замыкание на землю. (Проверить кабель питания двигателя и сам двигатель.) Поврежден силовой элемент. (Проверить IGBT-модуль.) Засорилось пространство между пластинами радиатора. (Почистить радиатор.) |
| Ошибка терморезистора | Преобразователь частоты следит за температурой двигателя по величине сопротивления терморезистора, подсоединенного к клемме TH. Если температура двигателя становится выше допустимого уровня, выход ПЧ отключается. | E35.0 | Двигатель слишком сильно нагревается. (Проверить температуру двигателя.) Поврежден терморезистор внутри двигателя. (Проверить терморезистор.) На сигнал терморезистора накладывается помеха. (Отделите цепи терморезистора от источника помех.) |
| Ошибка внешнего тормоза | Данная ошибка сигнализируется, когда включена функция управления внешним тормозом (b120 = 01) и после выдачи преобразователем частоты сигнала отпускания тормоза в течение заданного времени ожидания (b124) от тормоза не поступает сигнал подтверждения включения/выключения. | E36.0 | Тормоз не срабатывает на включение/ выключение. (Проверить внешний тормоз.) Заданное время ожидания b124 слишком мало. (Увеличить b124.) Обрыв в цепи сигнала подтверждения тормоза. (Проверить цепь сигнала подтверждения.) |
| Аварийное выключение *2 | Если переключатель SW1 на плате схемы управления находится в положении «ON», при поступлении сигнала на вход «EMR» (многофункц. вход 3) выход преобразователя частоты обесточивается (аппаратно) и сигнализируется ошибка. | E37.0 | Включена функция аварийного выключения, в работе внешнего оборудования произошла ошибка и на ПЧ был подан сигнал выключения. (Устранить ошибку во внешнем устройстве.) |
| Аварийное отключение из-за перегрузки в области малых скоростей | Если при очень низких оборотах двигателя (не более 0,2 Гц) электронная функция тепловой защиты преобразователя частоты обнаруживает перегрузку, выход ПЧ отключается. (В журнале ошибок, однако, может быть зарегистрировано более высокое значение частоты.) | E38.0 | Слишком большая нагрузка. (Уменьшить коэффициент нагрузки.) |
| Ошибка интерфейса связи Modbus | Данная ошибка сигнализируется, если в процессе обмена данными по интерфейсу Modbus-RTU по какойлибо причине (обрыв провода и т. п.) оказывается превышено время ожидания. (Действия ПЧ при ошибке связи определяются параметром C076.) | E41.0 | Неверное значение скорости связи. Превышена допустимая длина кабеля связи. (Проверить настройку параметров связи и кабель связи.) |
| Ошибка доп. карты 1 | Обнаружена ошибка карты, установленной в порт для доп. карты 1. | E60.0 … E69.0 | Дополнительная карта плохо зафиксирована. (Проверить, правильно ли выполнен монтаж карты.) |
| Ожидание из-за пониженного напряжения | Если входное напряжение опускается ниже допустимого уровня, преобразователь частоты отключает выход и ожидает с указанной индикацией. Данная ошибка также сигнализируется при кратковременном прерывании питания. | UV Wait | Пониженное напряжение питающей электросети. (Восстановить нормальное электропитание.) Неисправен контакт АВЛК и/или ЭМК. (Заменить АВЛК и/или ЭМК.) Напряжение между полюсами P/+ и N/- не соответствует норме. (Проверить напряжение между P/+ и N/-.) |
| Ошибка связи | Данная ошибка сигнализируется при нарушении обмена данными между преобразователем частоты и цифровой панелью управления. | COM ERROR | Неправильно подсоединен кабель панели управления. (Проверить правильность подсоединения кабеля.) Неправильно подсоединена цифровая панель управления. (Проверить подсоединение цифровой панели управления.) |
| Ожидание повторной попытки перезапуска | Данный код ошибки отображается во время ожидания повторной попытки запуска двигателя, когда действует функция возобновления работы после кратковременного прерывания питания или аварийного отключения выхода преобразователя частоты. | Restart Wait F-adj Wait |
В случае запуска с нулевой частоты. В случае запуска с подхватом скорости. |
| Отключение питания | Данный код ошибки сигнализируется при отключении электропитания преобразователя частоты. | Power OFF | ⎯ |
| Недопустимая команда «Ход» | Данная ошибка сигнализируется, если на преобразователь частоты поступает команда «Ход» в направлении, которое запрещено параметром b035. | RUN CMD. Disable | ⎯ |
Примечание:
Если вам необходим более широкий функционал частотного преобразователя, обратитесь к полной инструкции.
Скачать полное руководство по эксплуатации.

-
Уже зарегистрированы? Войти
-
Регистрация
Добавлен новый пункт в правила Форума
14. Запрещено использование картинок-мемов, сторонних эмоджи и смайлов в любых сообщениях форума.
Информация о файле
I528-RU2-02 Руководство пользователя для преобразователя частоты (инвертор) 3G3JV производства OMRON (ОМРОН) Yaskawa.