
Введение
Настоящее Руководство по эксплуатации предназначено
для ознакомления обслуживающего персонала с устройством, принципом
действия, конструкцией, технической эксплуатацией и обслуживанием
САУ-МП, в дальнейшем по тексту именуемого «прибор» или «САУ-МП».
Подключение, регулировка и техобслуживание прибора должны производиться
только квалифицированными специалистами после прочтения настоящего
руководства по эксплуатации.
Прибор изготавливается в различных модификациях, зашифрованных
в коде полного условного обозначения:
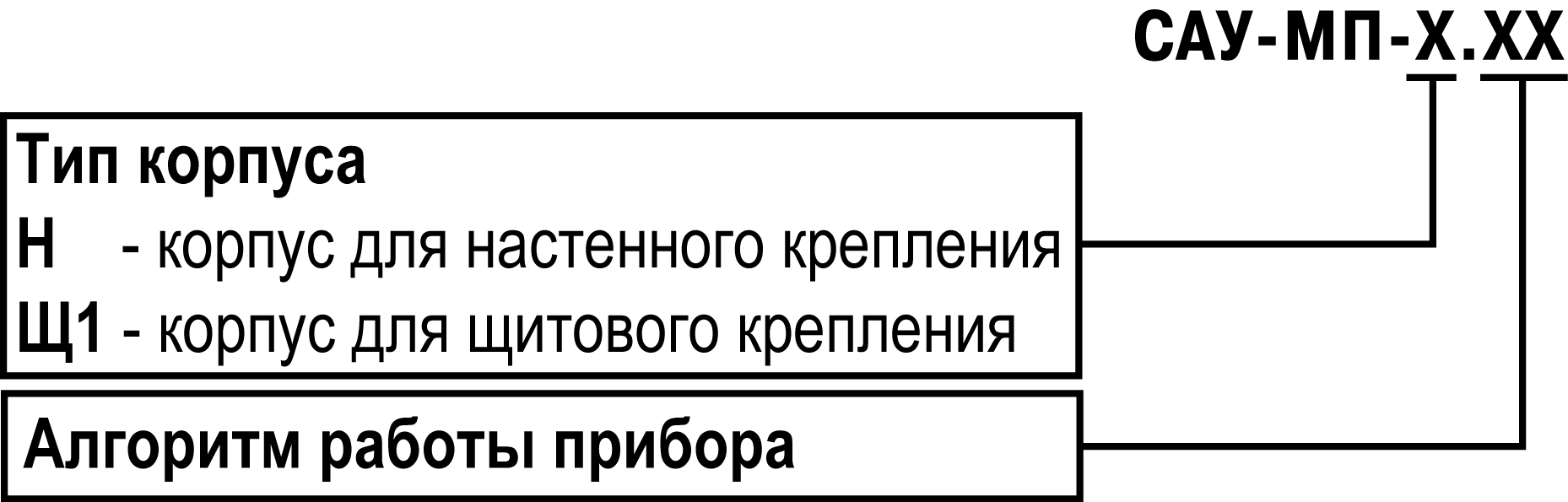
Пример полного названия прибора при заказе: САУ-МП-Н.11
Назначение и функции
Прибор предназначен для создания систем автоматизации технологических
процессов, связанных с контролем и поддержанием заданного уровня жидких
или сыпучих веществ в различного рода резервуарах, емкостях, контейнерах
и т. п.
САУ-МП используется только в комплекте с датчиками уровня и исполнительными
устройствами.
Прибор выпускается согласно ТУ 4217-017-46526536-2009.
Функции прибора:
- управление тремя исполнительными механизмами (например, насосами)
по выбранному алгоритму; - работа с различными по электропроводности жидкостями: водопроводной,
загрязненной водой, молоком и пищевыми продуктами (слабокислотными,
щелочными и пр.).
Технические характеристики и условия эксплуатации
Технические характеристики
Характеристики прибора
|
Наименование |
Значение |
|---|---|
| Диапазон переменного напряжения питания для всех типов корпусов: |
|
|
220 (± 10 %) В |
|
50 Гц |
|
Потребляемая мощность, не более |
6 ВА |
|
Количество входов |
4 |
| Типы входных датчиков |
|
|
Максимальное допустимое напряжение |
5 В |
|
Источник питания активных датчиков:
|
|
|
Количество встроенных выходных реле |
3 |
|
Максимально допустимый ток нагрузки, коммутируемый контактами встроенного |
8 А при 220 В 50 Гц (cos φ > 0,4) |
|
Габаритные размеры корпуса (степень защиты со стороны лицевой панели):
|
|
| Масса прибора, не более | 0,7 кг |
| Средний срок службы |
8 лет |
Условия эксплуатации
Прибор предназначен для эксплуатации при следующих условиях:
- закрытые взрывобезопасные помещения без агрессивных паров и газов;
- температура окружающего воздуха от +5 до +50 °С;
- верхний предел относительной влажности воздуха: не более 80 %
при +35 °С и более низких температурах без конденсации влаги; - атмосферное давление от 84 до 106,7 кПа.
 Предупреждение
Предупреждение
Требования в части внешних воздействующих факторов
являются обязательными, т.к. относятся к требованиям безопасности.
Меры безопасности
 Опасность
Опасность
На клеммнике присутствует опасное для жизни
напряжение величиной до 250 В. Любые подключения к прибору и работы
по его техническому обслуживанию следует производить только при отключенном
питании прибора.
По способу защиты от поражения электрическим
током прибор соответствует классу II по ГОСТ 12.2.007.0-75.
Во время эксплуатации, технического обслуживания
и поверки прибора следует соблюдать требования ГОСТ 12.3.019-80, Правил
эксплуатации электроустановок потребителей и Правил охраны труда при
эксплуатации электроустановок потребителей.
Не допускается попадание влаги на контакты выходного разъема и
внутренние электроэлементы прибора. Прибор запрещено использовать
в агрессивных средах с содержанием в атмосфере кислот, щелочей, масел
и т. п.
Монтаж
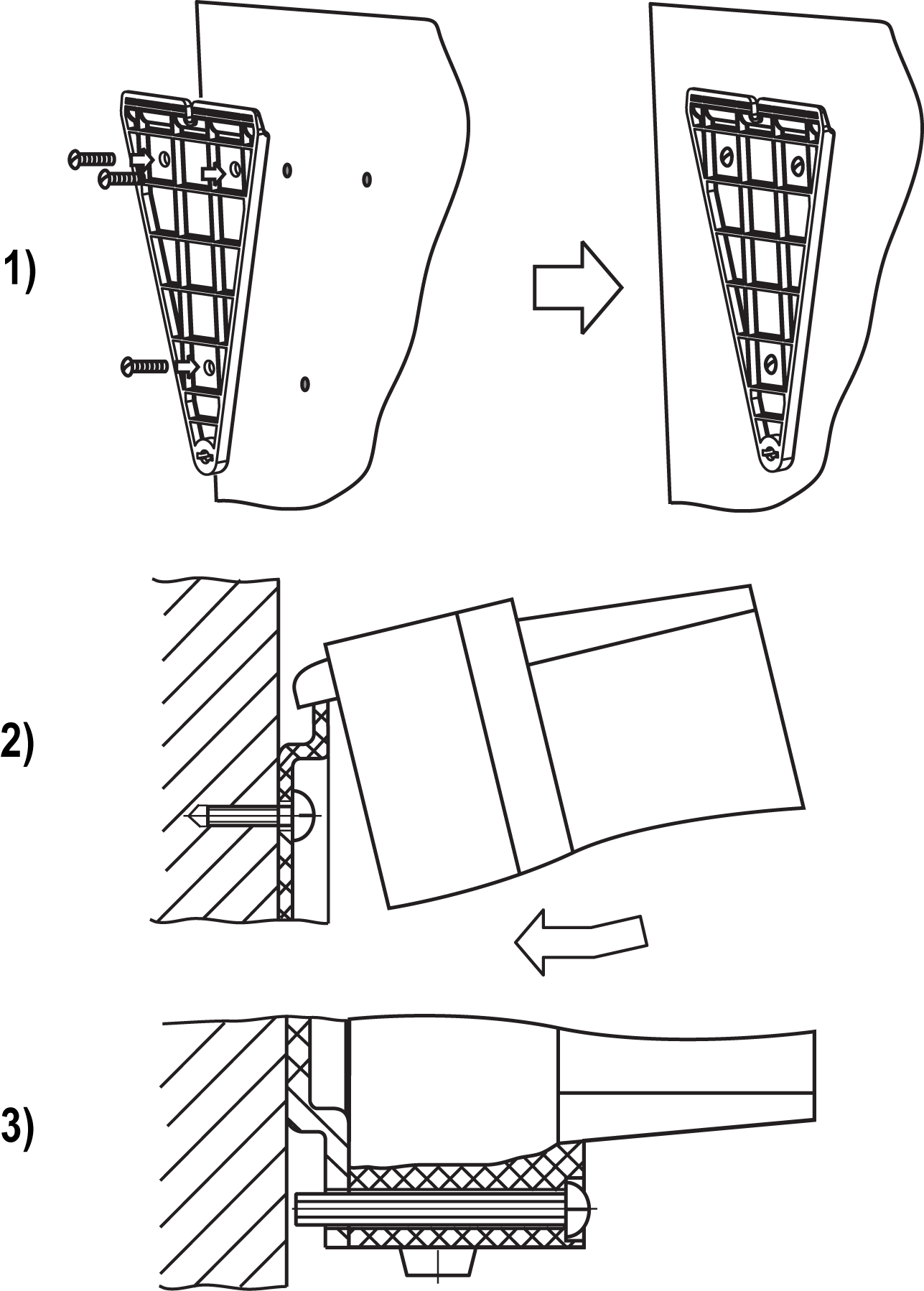
Установка прибора настенного крепления H
Для установки прибора следует:
-
Закрепить кронштейн тремя винтами М4 ×
20 на поверхности, предназначенной для установки
прибора (см. рисунок). Примечание
ПримечаниеВинты для крепления кронштейна
не входят в комплект поставки. - Зацепить крепежный уголок на задней стенке прибора за верхнюю
кромку кронштейна. - Прикрепить прибор к кронштейну винтом из комплекта поставки.
Демонтаж прибора следует производить в обратном порядке.
Предупреждение
Провода подключаются при снятой крышке прибора.
Для удобства подключения следует зафиксировать основание прибора на
кронштейне крепежным винтом.
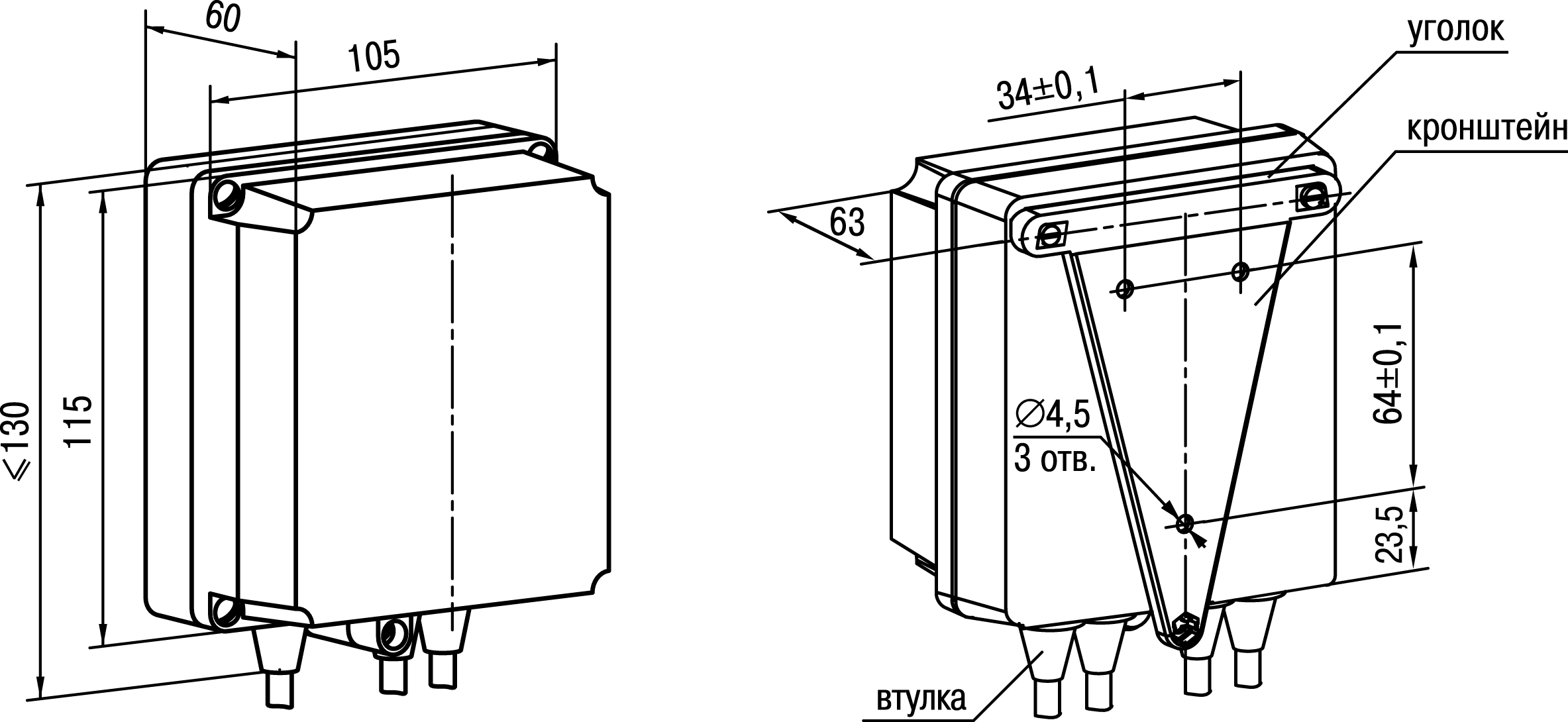
корпуса Н
 Примечание
Примечание
Втулки следует подрезать в соответствии с диаметром
вводного кабеля.
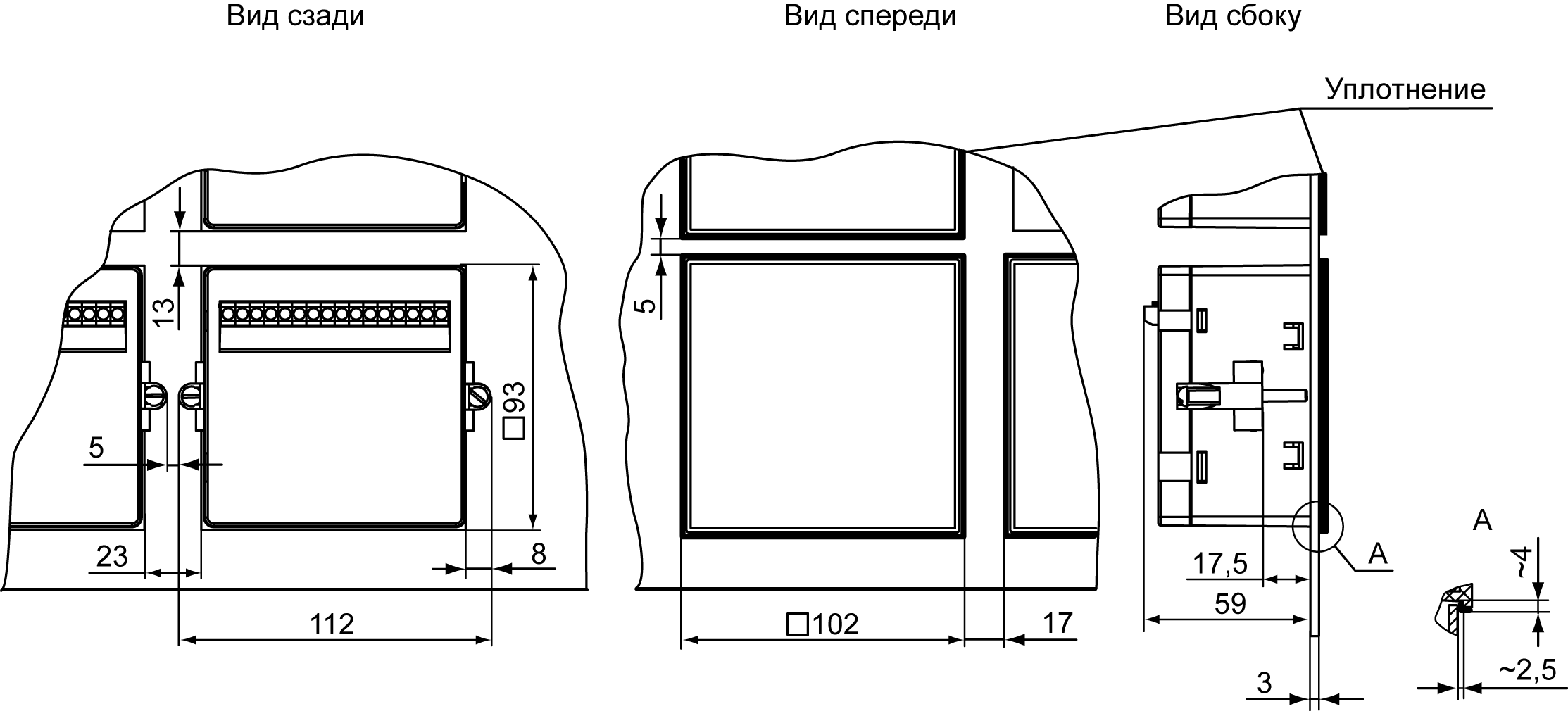
Установка прибора щитового крепления Щ1
Для установки прибора следует:
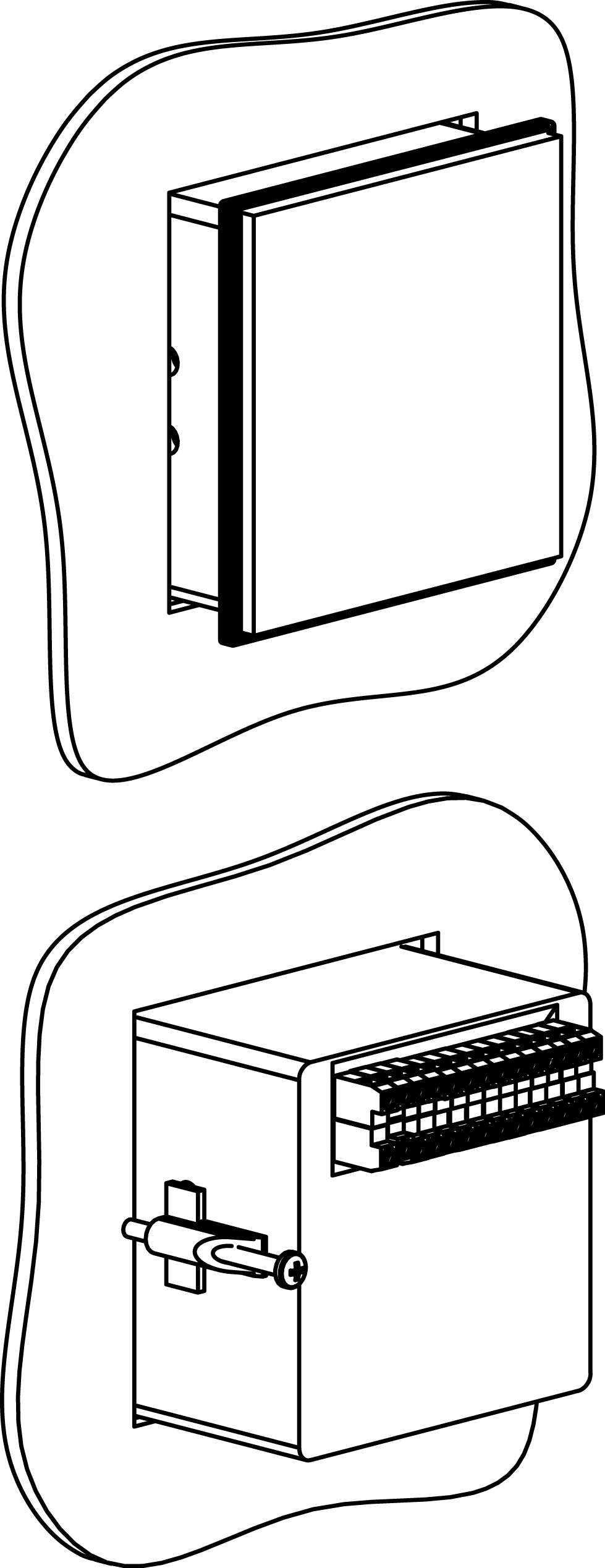
- Подготовить на щите управления место для установки прибора (см. рисунок).
- Установить прокладку на рамку прибора для обеспечения степени
защиты IP54. - Вставить прибор в специально подготовленное отверстие на лицевой
панели щита. - Вставить фиксаторы из комплекта поставки в отверстия на боковых
стенках прибора. - С усилием завернуть винты М4 × 35 из комплекта поставки в отверстиях
каждого фиксатора так, чтобы прибор был плотно прижат к лицевой панели
щита.
Демонтаж прибора следует производить в обратном порядке.
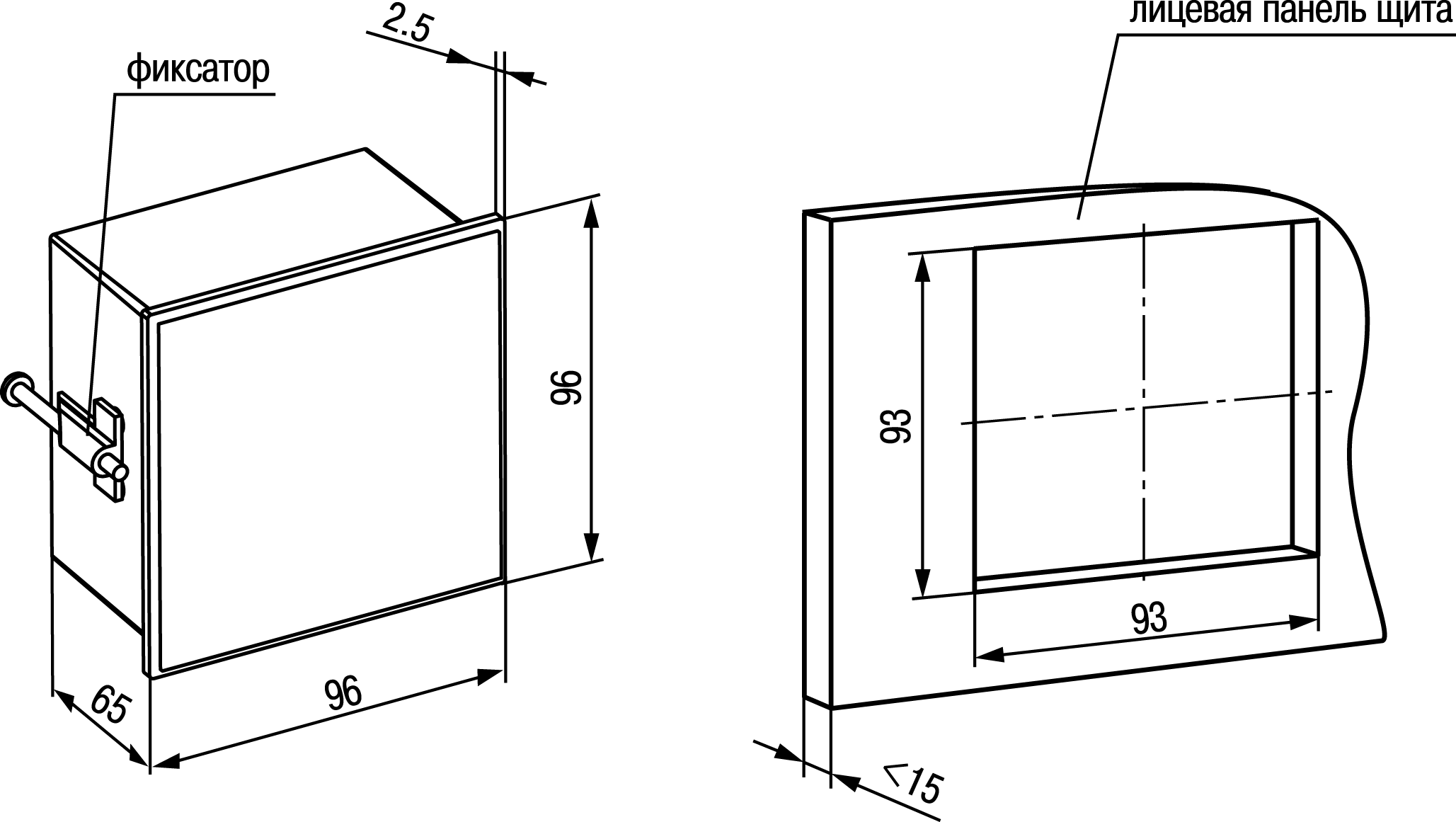
корпуса Щ1
Подключение
Рекомендации по подключению
Для обеспечения надежности электрических соединений рекомендуется
использовать медные многожильные кабели. Перед подключением концы
кабелей следует зачистить и залудить их или использовать кабельные
наконечники. Жилы кабелей следует зачищать так, чтобы их оголенные
концы после подключения к прибору не выступали за пределы клеммника.
Сечение жил кабелей должно быть не более 1 мм2.
Общие требования к линиям соединений:
-
во время прокладки кабелей следует выделить линии связи, соединяющие
прибор с датчиком, в самостоятельную трассу (или несколько трасс),
располагая ее (или их) отдельно от силовых кабелей, а также от кабелей,
создающих высокочастотные и импульсные помехи; -
для защиты входов прибора от влияния промышленных электромагнитных
помех линии связи прибора с датчиком следует экранировать. В качестве
экранов могут быть использованы как специальные кабели с экранирующими
оплетками, так и заземленные стальные трубы подходящего диаметра.
Экраны кабелей с экранирующими оплетками следует подключить к контакту
функционального заземления (FE) в щите управления; -
фильтры сетевых помех следует устанавливать в линиях питания
прибора; -
искрогасящие фильтры следует устанавливать в линиях коммутации
силового оборудования.
Монтируя систему, в которой работает прибор, следует учитывать
правила организации эффективного заземления:
-
все заземляющие линии прокладывать по схеме «звезда» с обеспечением
хорошего контакта с заземляемым элементом; -
все заземляющие цепи должны быть выполнены проводами наибольшего
сечения; -
запрещается объединять клемму прибора с маркировкой «Общая»
и заземляющие линии.
Порядок подключения
Опасность
После распаковки прибора следует убедиться, что
во время транспортировки прибор не был поврежден.
Если прибор находился длительное время при температуре ниже минус
20 °С, то перед включением и началом работ необходимо выдержать его
в помещении с температурой, соответствующей рабочему диапазону, в
течение 30 мин.
Примечание
Для нормальной эксплуатации насоса, используемого
в системе, прибор следует подключать к сети 220 В, 50 Гц через промежуточный
автоматический выключатель с токовой защитой.
Для подключения прибора следует:
-
Подключить прибор к источнику питания.
ВниманиеПеред подачей питания на прибор следует проверить правильность подключения
напряжения питания и его уровень. - Подключить линии связи «прибор – датчики» к первичным преобразователям
и входам прибора. -
Подключить линии связи выходных реле к исполнительным устройствам.
- Подать питание на прибор.
- Снять питание.
- Настроить прибор.
Назначение клеммника
Подключение датчиков
Общие сведения
Примечание
Для защиты входных цепей прибора от возможного
пробоя зарядами статического электричества, накопленного на линиях
связи «прибор – датчик», перед подключением к клеммнику прибора их
жилы следует на 1–2 секунды соединить с винтом функционального заземления
(FE) щита.
Во время проверки исправности датчика и линии связи прибор следует
отключить от сети питания. Чтобы избежать выхода прибора из строя
при «прозвонке» связей следует использовать измерительные устройства
с напряжением питания не более 4,5 В. При более высоких напряжениях
питания этих устройств отключение датчика от прибора обязательно.
Внимание
Не допускается прокладка линий связи датчиков
уровня с прибором в одной трассе совместно с силовыми проводами, а
также с проводами, несущими высокочастотные или импульсные токи.
Для надежного контакта внешних соединений с клеммником рекомендуется
зачистить и облудить концы кабелей соединения. Кабельные вводы прибора
рассчитаны на подключение кабелей с наружным диаметром 6–12 мм.
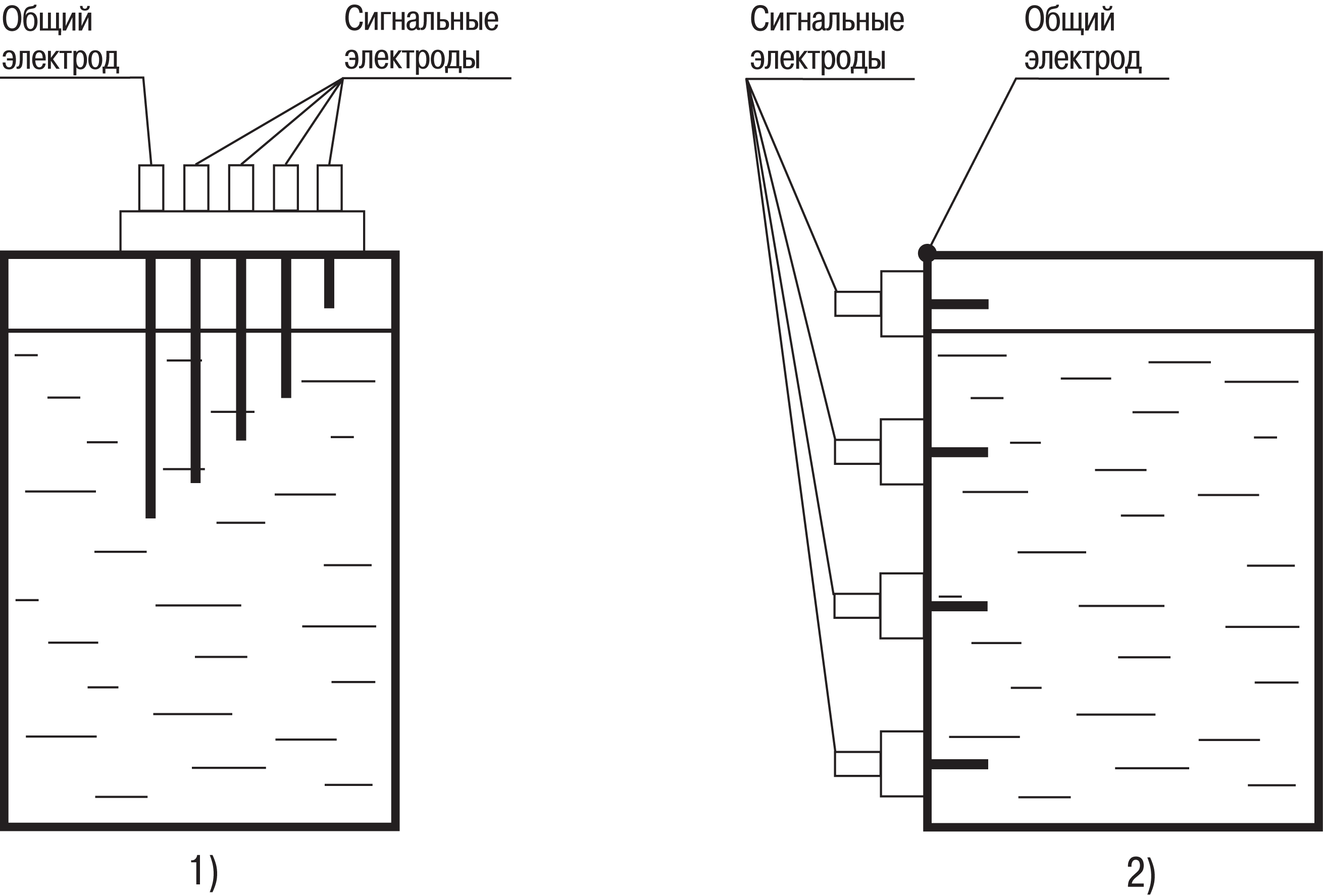
Во время установки датчиков рекомендуется:
- датчики уровня жидкости в баке и скважине установить таким образом,
чтобы электроды не касались металлических стенок. Концы двух длинных
электродов каждого датчика соответствуют нижним уровням воды в баке
и скважине, а концы коротких электродов – верхним уровням; -
уровни регулируются изменением общей высоты установки датчика
и перемещением концов электродов относительно друг друга. Допускается
механическое укорачивание (подрезание) электродов; - во время установки активных датчиков следует соблюдать минимальное
расстояние между ними (25–30 см) как по вертикали, так и по горизонтали,
чтобы избежать взаимного влияния сигналов.
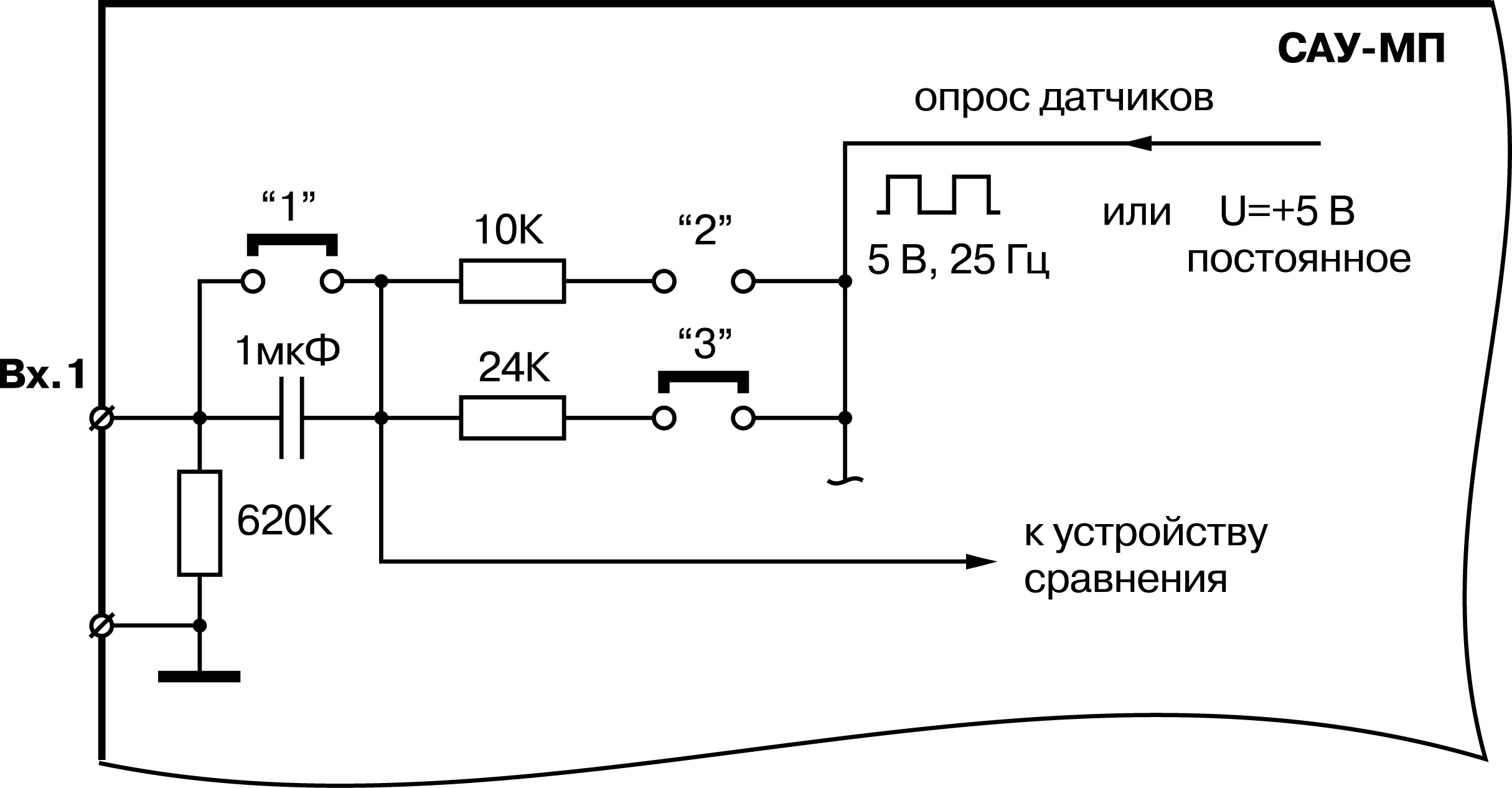
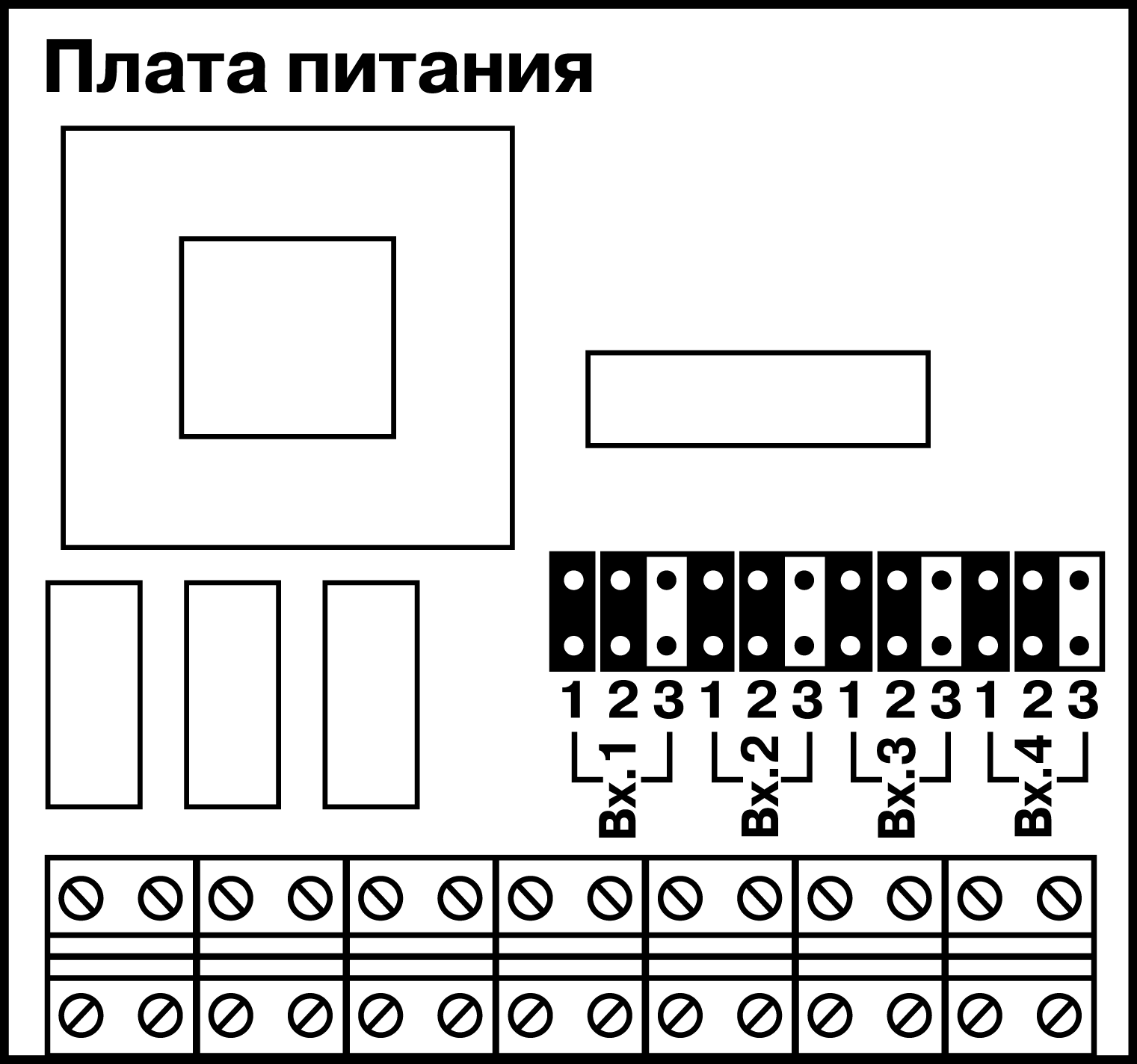
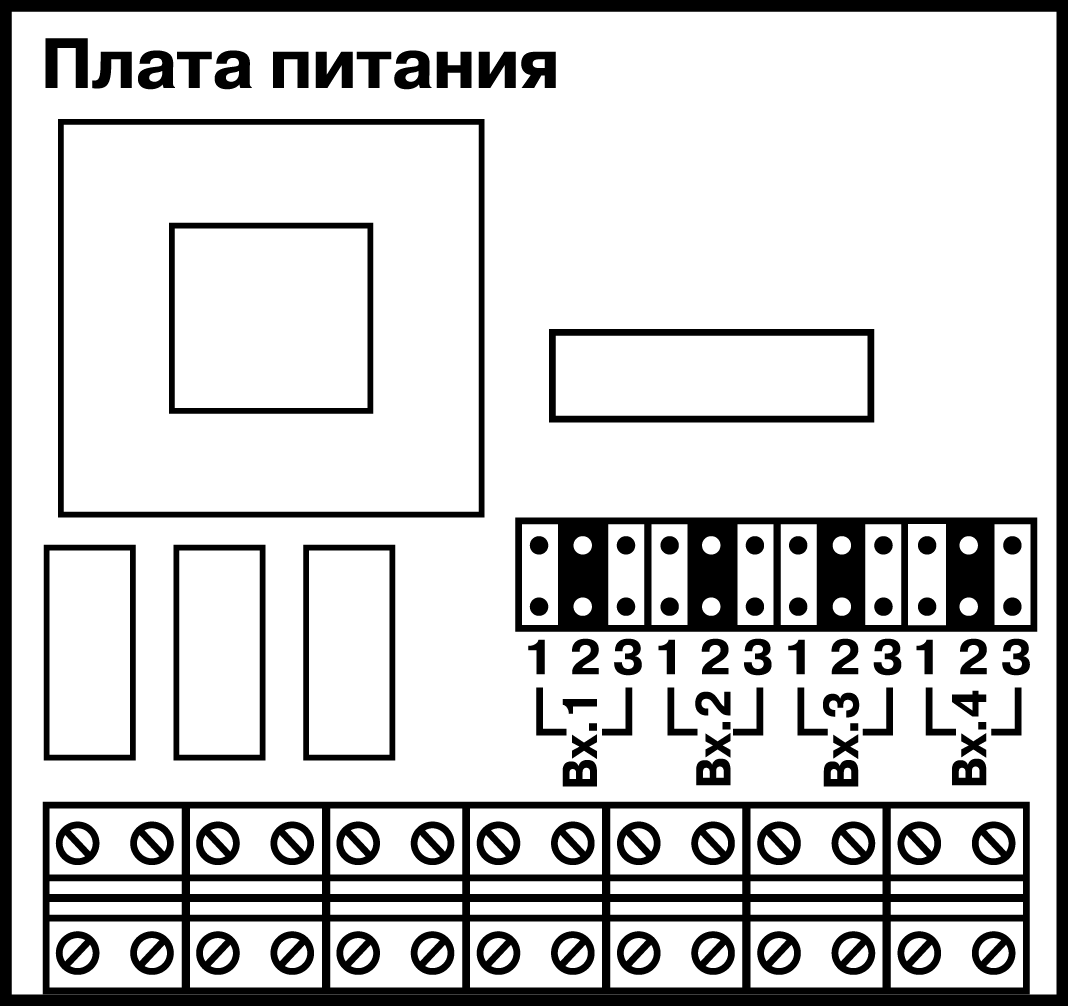
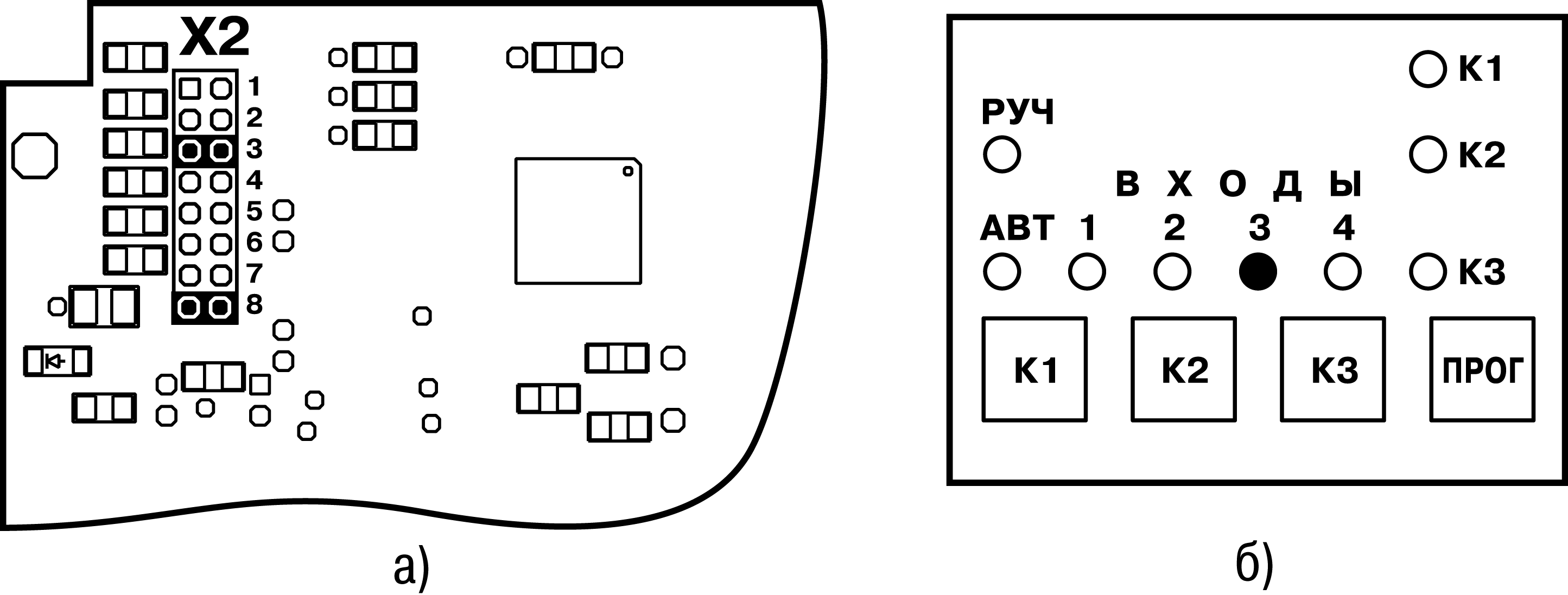
Каждое входное устройство имеет набор из трех перемычек, которые
должны быть удалены или определенным образом установлены в зависимости
от типа подключенного к входу датчика. Перемычки находятся на задней
плате, рядом с входным клеммником прибора.
Функциональная схема одного из четырех входных устройств показана
на рисунке ниже.
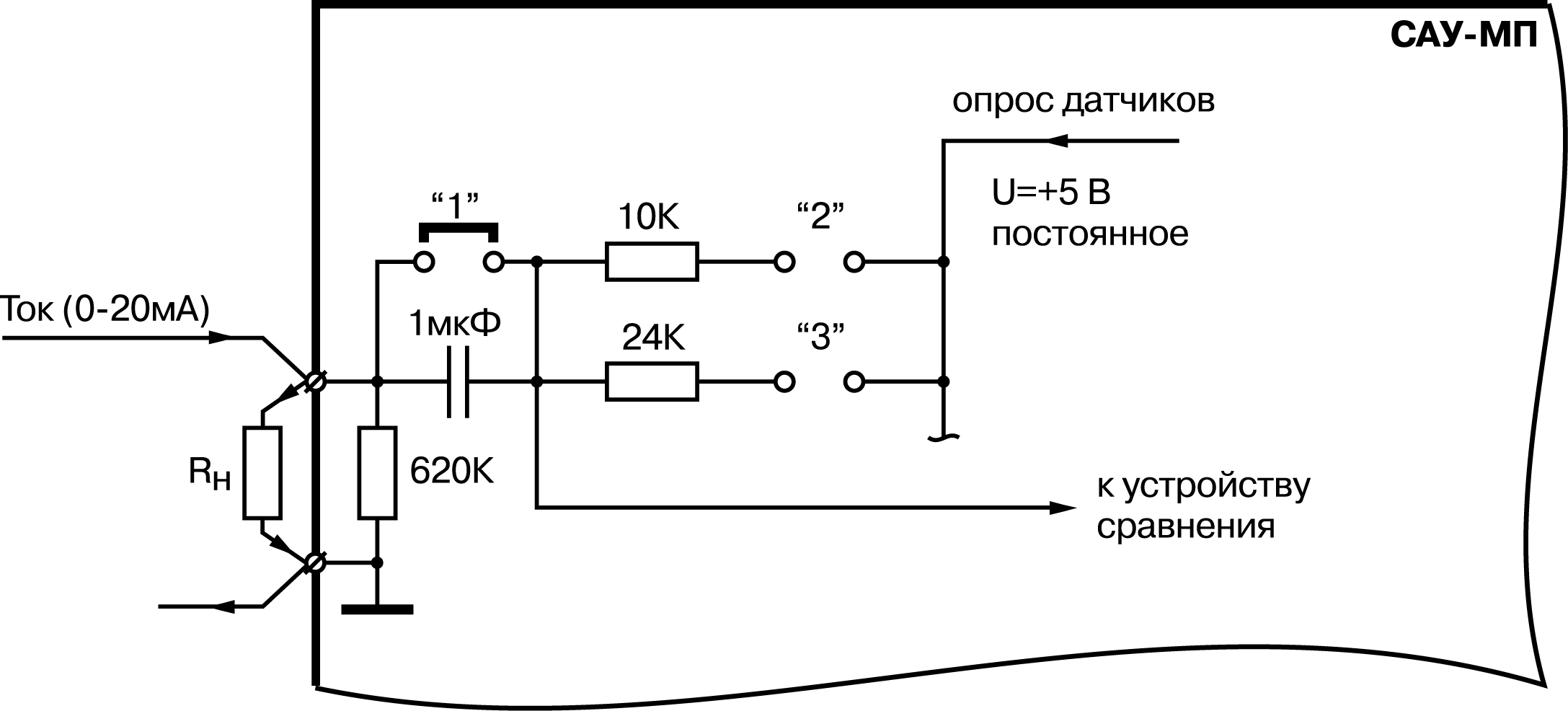
Подключение кондуктометрических зондов
Кондуктометрические зонды применяются для контроля уровня
жидкостей, обладающих электрической проводимостью. Примеры установки
кондуктометрических зондов на объектах представлены на рисунке ниже.
Предупреждение
Для контроля уровня в металлическом резервуаре
его корпус следует использовать в качестве общего электрода.
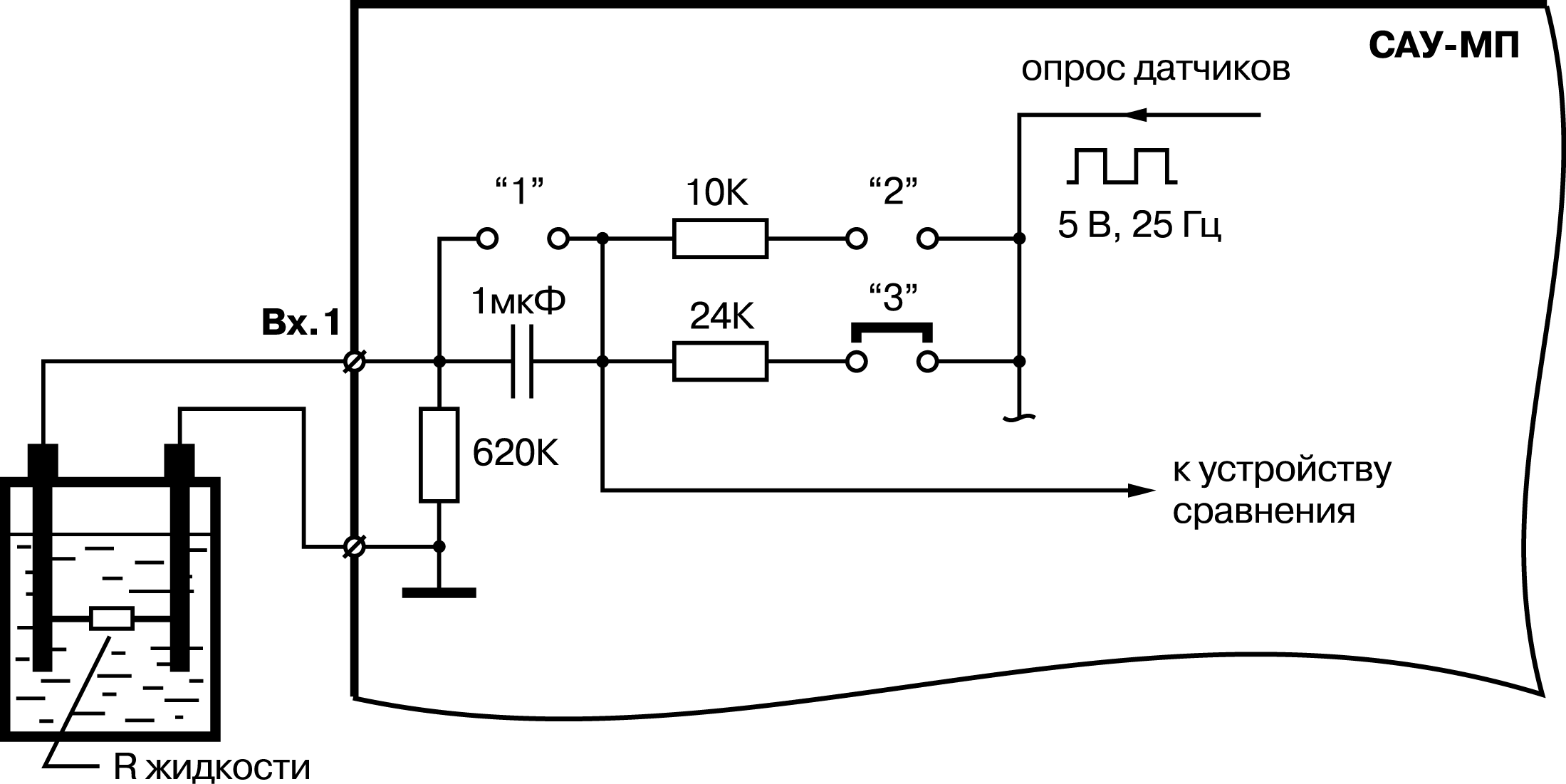
По мере заполнения резервуара электроды соприкасаются с жидкостью,
электрические цепи замыкаются между общим и соответствующими сигнальными
входами прибора, фиксируемое входными устройствами как достижение
заданных уровней. Схема подключения кондуктометрического зонда к прибору
приведена на рисунке ниже.
перемычек)
Для повышения чувствительности и долговечности кондуктометрических
зондов следует перевести соответствующие входы прибора в режим питания
датчиков переменным напряжением. Для этого следует удалить перемычку
«1» соответствующего входного устройства.
В случае подключения датчика любого другого типа перемычка «1»
должна быть установлена.
Для изменения чувствительности входа в зависимости от электропроводности
контролируемой жидкости устанавливается одна из перемычек «2» или
«3». Для контроля обычной водопроводной воды и других жидкостей, обладающих
относительно низким сопротивлением, устанавливается перемычка «2»,
для жидкостей, обладающих высоким сопротивлением – перемычка «3».
Датчики с выходными ключами n-p-n-типа
Для нормальной работы САУ-МП выходные ключи датчиков должны переключаться
из закрытого состояния в открытое в случае достижения веществом контролируемого
уровня.
Активные датчики следует запитывать от встроенного в прибор источника
постоянного тока напряжением 12 В или от внешнего блока питания (рисунок
ниже).
Для работы с датчиками этого типа на соответствующем входном устройстве
должны быть установлены перемычки «1» и «2».
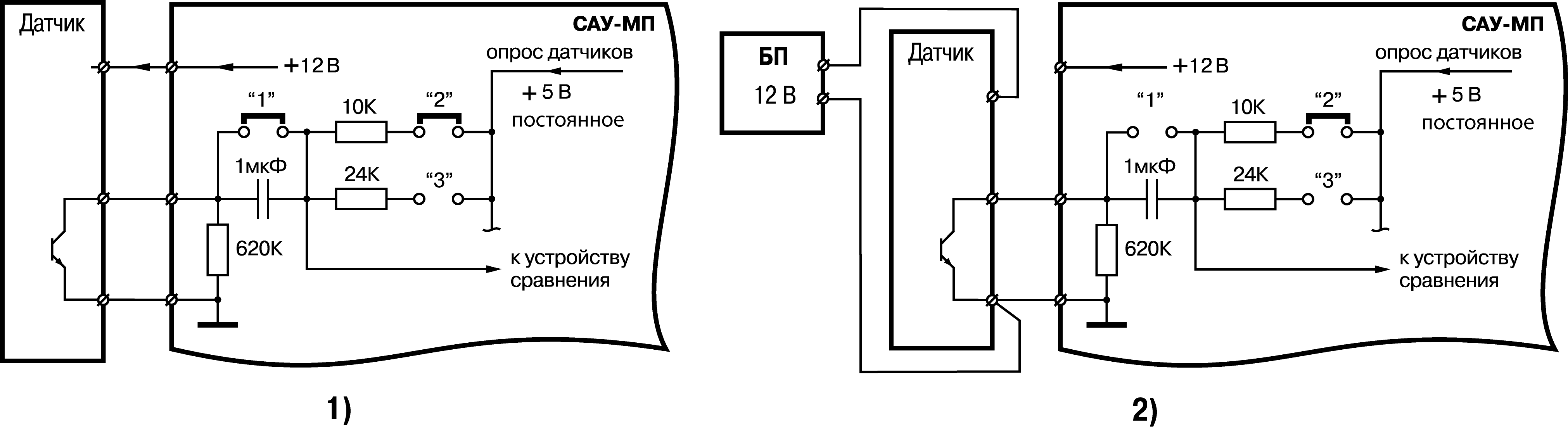
прибора, 2) питание от внешнего источника
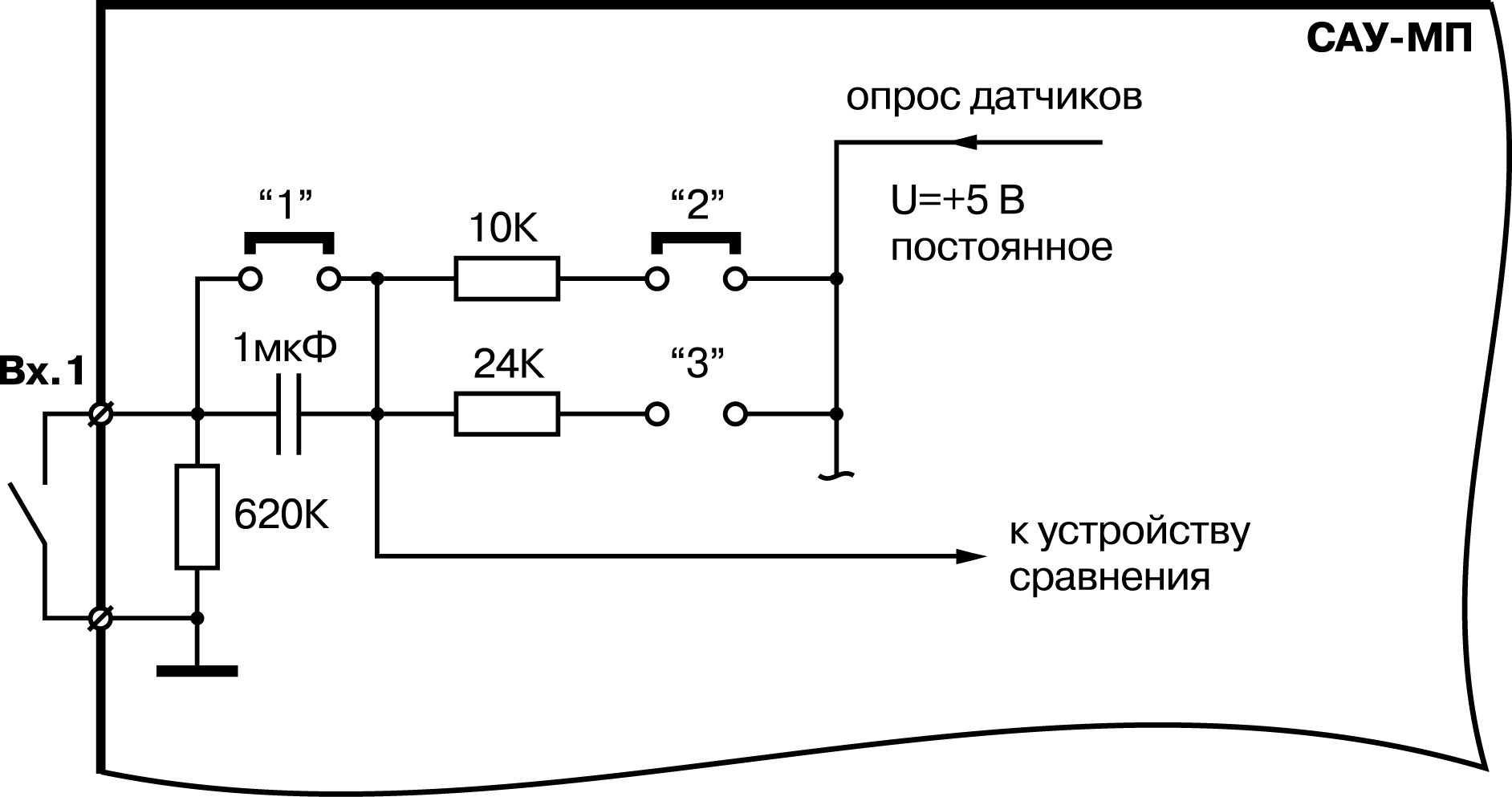
Подключение механических контактных устройств
Механические контактные устройства могут применяться для контроля
работоспособности насосов в системах водоснабжения, а также для контроля
уровня различных по физико-химическому составу жидкостей в устройствах
поплавкового типа (например, датчики типа ДЭМ).
Вместо датчиков данного типа к входам прибора могут быть подключены
кнопочные пульты или тумблеры для запуска, остановки или изменения
хода выполнения процесса.
Схема подключения датчиков с механическими контактами на выходе
приведена на рисунке ниже.
на выходе
Для работы с датчиками данного типа на соответствующем входном
устройстве должны быть установлены перемычки «1» и «2».
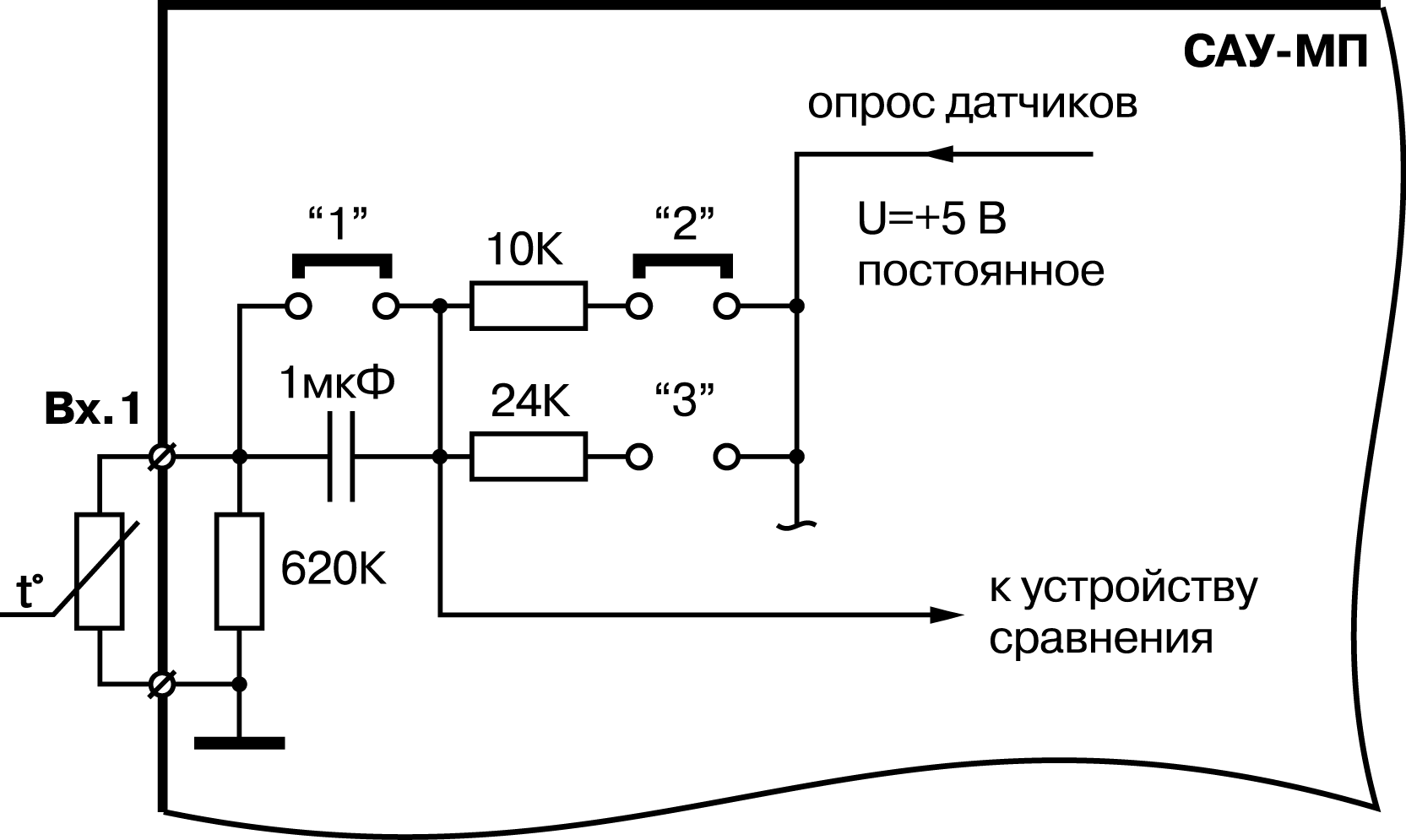
Подключение позисторов и термисторов
Резисторы, изменяющие свое сопротивление в зависимости от температуры
по нелинейному закону (позисторы, термисторы), часто встраивают, например,
в обмотки электродвигателей и используют в качестве датчиков температуры
для защитного отключения установок.
Термисторы и позисторы подключаются к входам прибора по схеме
на рисунке ниже. В приборе должны быть установлены перемычки «1» и «2». Номинал этих резисторов должен
находиться в пределах от 100 Ом до 10 кОм.
Подключение одного датчика к двум входам
Допускается подключение одного датчика одновременно к нескольким
входам прибора. Например, для установки двух уровней температурной
защиты («предупредительный сигнал» и «защитное отключение») следует
установить разные значения опорного напряжения для компараторов, а
затем подключить позистор к двум разным входам прибора по схеме, указанной
на рисунке ниже.
входам
Эксплуатация
Принцип работы
Функциональная схема прибора приведена на рисунке ниже.
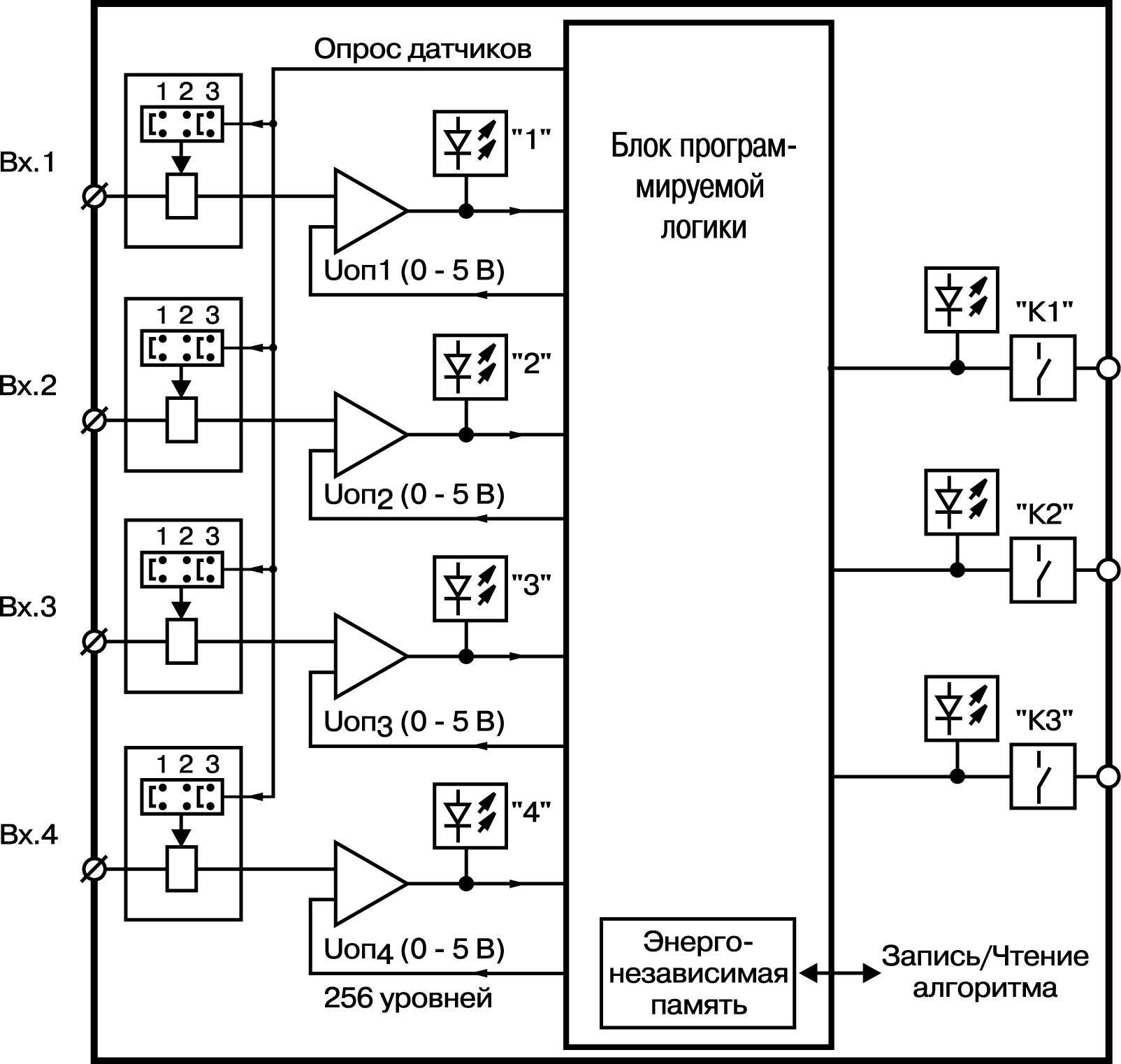
Состав прибора:
- входные устройства ВУ1…ВУ4 предназначены для приема сигналов
датчиков, сравнения величины принятого сигнала с заданным и выдачи
на блок программируемой логики соответствующего логического уровня
(0 или 1); - блок программируемой логики предназначен для формирования
сигналов управления выходными реле по принятым от входных устройств
сигналам в соответствии с записанным в его энергонезависимой памяти
алгоритмом, а также для приема и копирования алгоритма из другого
прибора САУ-МП или компьютера; - выходные электромагнитные реле предназначены для управления
исполнительными механизмами.
Блок программируемой логики включает в себя:
- четыре программируемых источника опорного напряжения для входных
устройств; - набор функциональных элементов (таймеров, счетчиков, генераторов,
триггеров и т. д)
Связи между элементами, необходимые для выполняемого прибором алгоритма,
сначала формируются в компьютере с использованием программного обеспечения.
Затем загружаются в энергонезависимую память САУ-МП через кабель.
Алгоритм, как правило, записывается в прибор на заводе-изготовителе,
но, в случае необходимости, допускается его замена по методике, изложенной
в разделе.
Блок программируемой логики позволяет выполнять следующие функции:
- выполнение заданного алгоритма;
- прием и запись рабочего алгоритма из компьютера или другого «образцового»
прибора; - копирование алгоритма в другой прибор;
- изменение опорных напряжений входных устройств;
- изменение уставок таймеров;
- ручное управление выходными реле;
- отсчет задержки начала выполнения алгоритма.
Управление исполнительными механизмами
Для управления технологическим оборудованием прибор оснащен тремя
встроенными электромагнитными реле (8 А, 220 В), которые включаются
по командам блока программируемой логики в соответствие с выполняемым
алгоритмом.
Алгоритмы работы
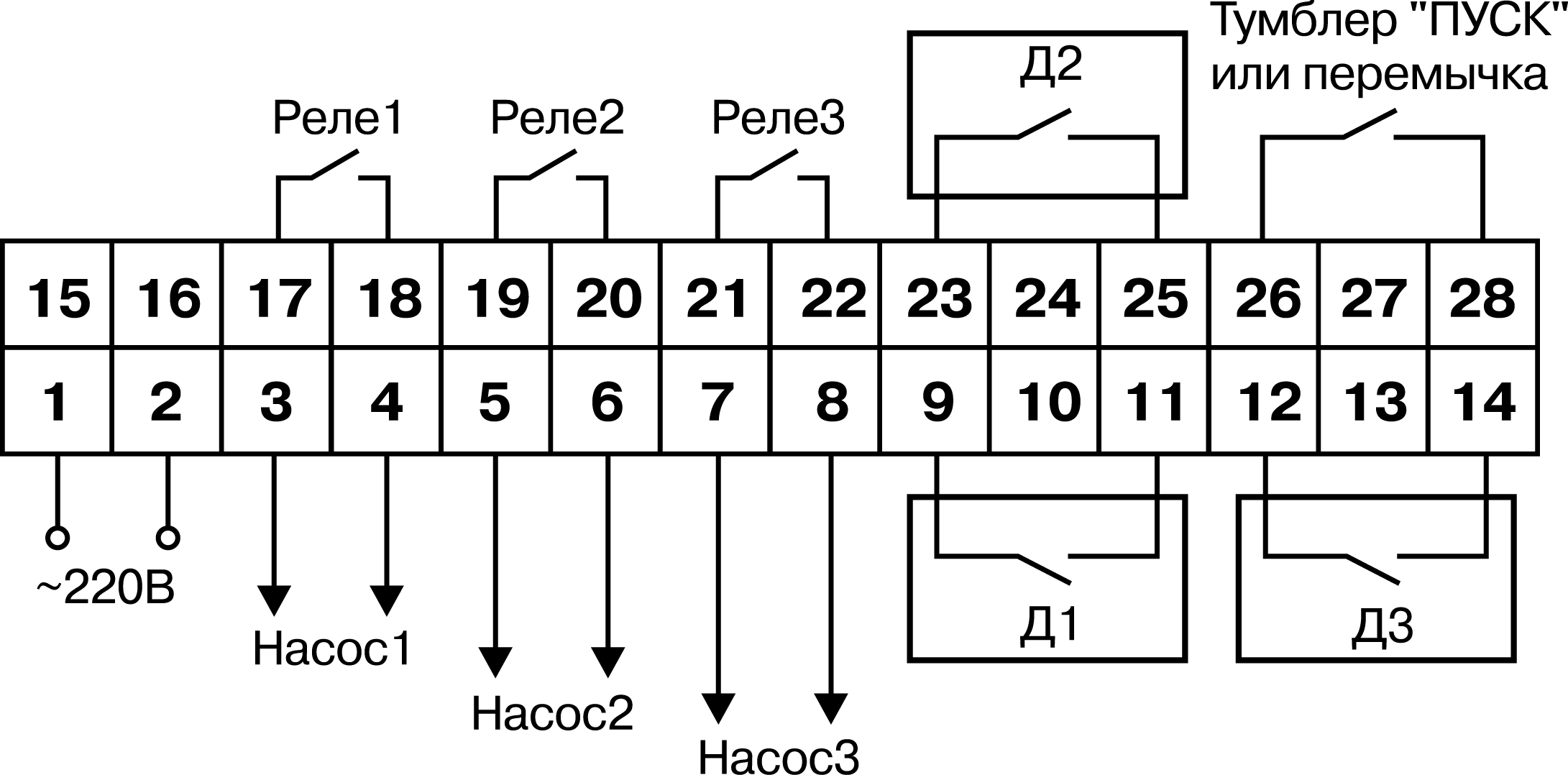
Алгоритм 06 (для трех резервуаров и трех насосов)
Алгоритм 06 предназначен для управления тремя независимыми насосами,
каждый из которых поддерживает уровень жидкости в одной из трех емкостей
по показаниям датчиков уровня Д1…Д3 (см. рисунок ниже). Датчики уровня
подключены к входам 1…3.
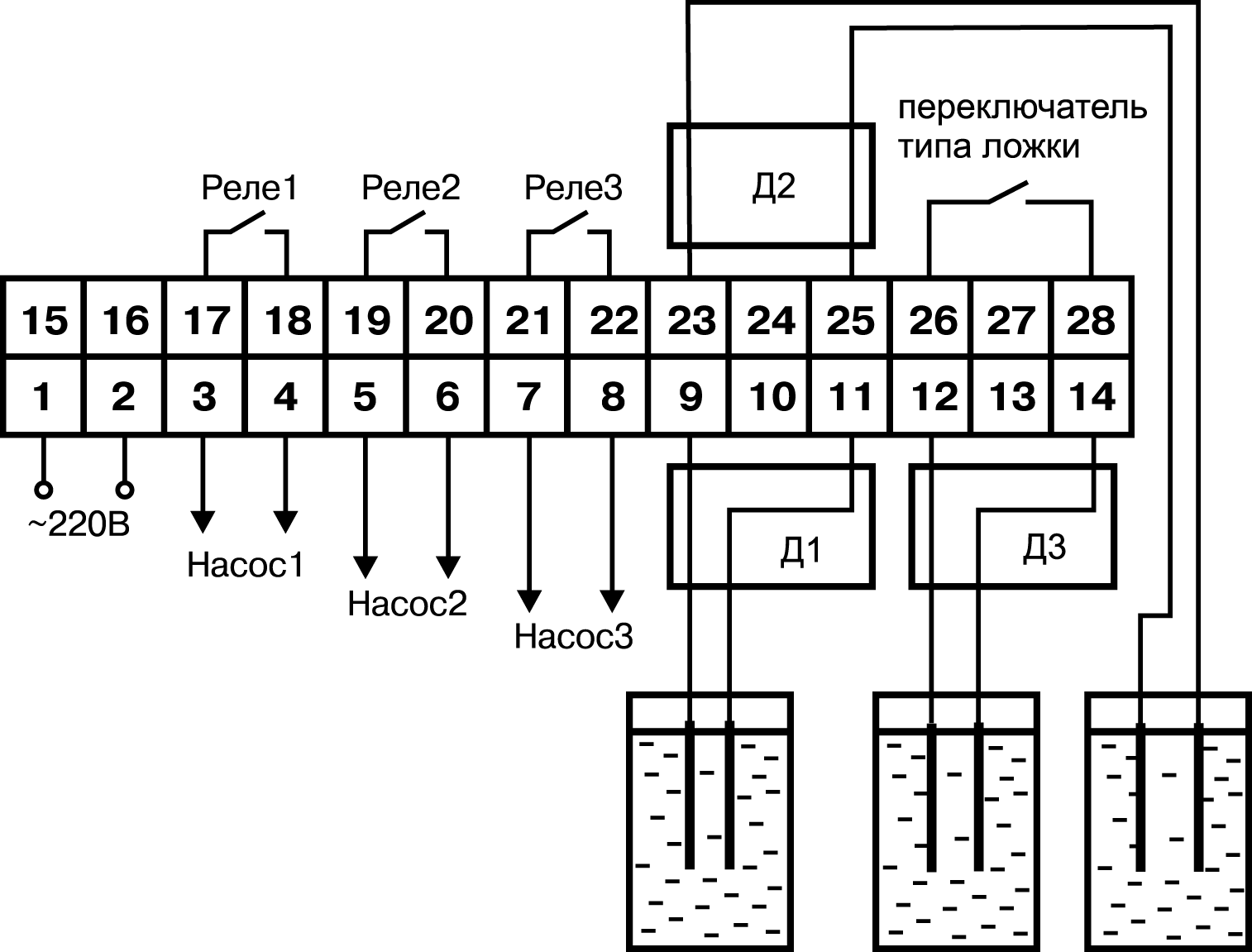
Прибор работает по двум типам логики: прямой и обратной. Если установлена
перемычка на входе 4, то реализуется прямая логика. Если перемычка
на входе 4 отсутствует – обратная логика.
Предупреждение
Нельзя настроить прибор так, чтобы один насос
работал согласно прямой логике, а остальные согласно обратной.
В случае работы по прямой логике насос включается в случае
осушения кондуктометрического датчика (размыкании контактов) и начинает
закачивать в бак жидкость, пока ее уровень не повысится до положения
уровня установленного датчика (работа на заполнение емкости – заводская
установка по умолчанию).
В случае работы по обратной логике насос включается в случае
затопления кондуктометрического датчика (замыкании контактов) и начинает
откачивать жидкость из бака, пока ее уровень не понизится до положения
ниже уровня установленного датчика (работа на осушение емкости).
В случае изменения состояния датчика на время, большее заданного,
происходит включение/выключение насоса согласно заданной логике. В
случае изменения состояния датчика на время, меньшее уставки задержки,
состояние насоса не меняется.
Например, в случае замыкания контактов датчика на время, большее
7 с (значение уставки задержки по умолчанию) при прямой логике работающий
насос 1 выключается. Насос включится, если контакты датчика Д1 будут
разомкнуты дольше 7 с (по умолчанию). Другие насосы работают аналогичным
образом.
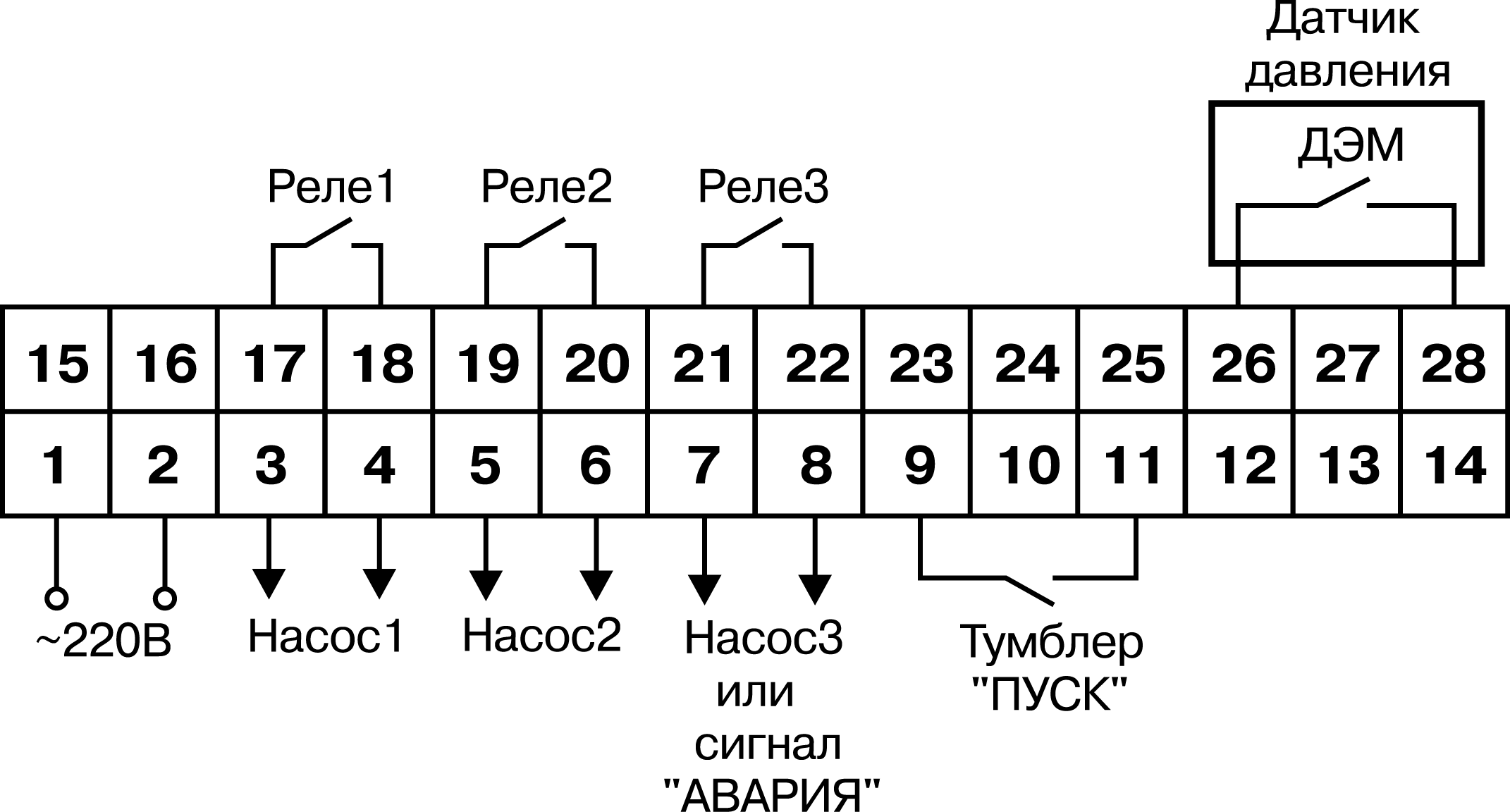
Алгоритм 11 (для магистрали водоснабжения с двумя насосами)
Алгоритм предназначен для управления двумя работающими поочередно
насосами (основным и резервным), имеющими общий датчик наличия потока.
В качестве датчика может быть использован датчик ДЭМ. В алгоритме
предусмотрена возможность аварийной сигнализации или включения третьего
насоса. Схема подключения САУ-МП к элементам системы приведена на
рисунке ниже.
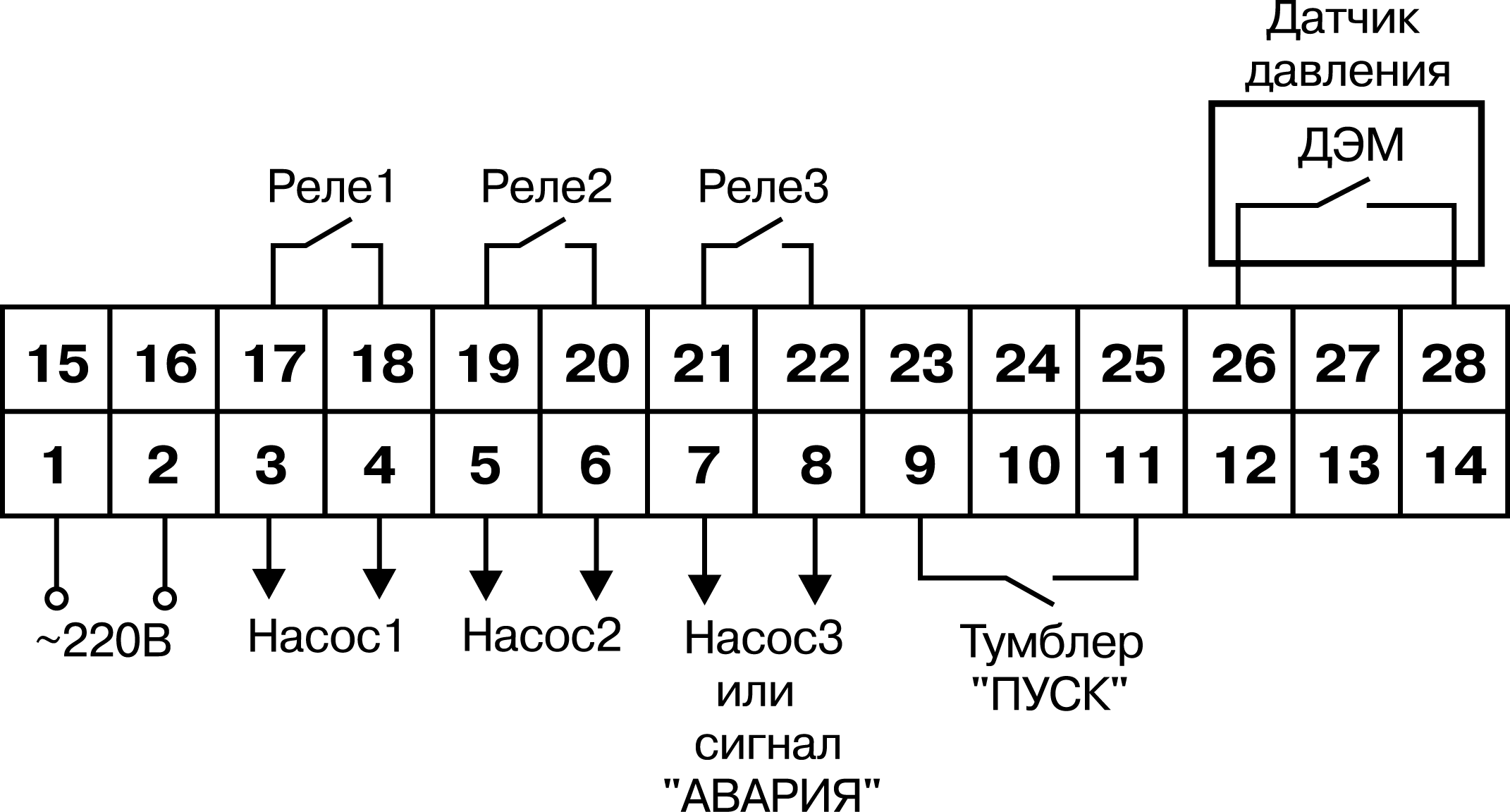
Реле 1 и 2 управляют работой основного и резервного насоса. Реле
3 включает сигнализацию об аварии или третий насос. Датчик наличия
потока ДЭМ подключается к четвертому входу прибора.
К первому входу следует подключить тумблер, замыкание которого
запускает выполнение алгоритма.
Алгоритм работы:
- После включения питания САУ-МП отрабатывает задержку включения
Т0, затем проверяет состояние входа 1 и, если тумблер замкнут, включает
первый насос. - Если в течение заданного времени в трубе создается необходимое
давление, контакты датчика наличия потока замыкаются и работает первый
насос. По истечении заданного времени реле 1 выключается и включается
реле 2, управляющее вторым насосом. Если второй насос исправен, то
контакты ДЭМ окажутся замкнуты, и работа насоса будет продолжена. - Через заданное время прибор выключит реле 2 и снова включит реле
1, обеспечивая равномерный износ основного и резервного насоса. - Если во время работы одного из насосов контакты ДЭМ разомкнулись
на время, большее заданного, или во время пуска двигателя насоса через
заданное время контакты ДЭМ не замкнулись, прибор считает, что произошла
авария, и включает резервный насос. Неисправный насос выключается,
а соответствующий ему светодиод (К1 или К2) начинает
мигать. - Если в процессе работы вышли из строя оба насоса, то включается
третье реле, к которому подключен третий насос или аварийная сигнализация.
В этом случае начинают мигать оба светодиода К1 и К2. Третье реле будет замкнуто до снятия питания с прибора или до перезапуска
алгоритма тумблером, подключенным к входу 1.
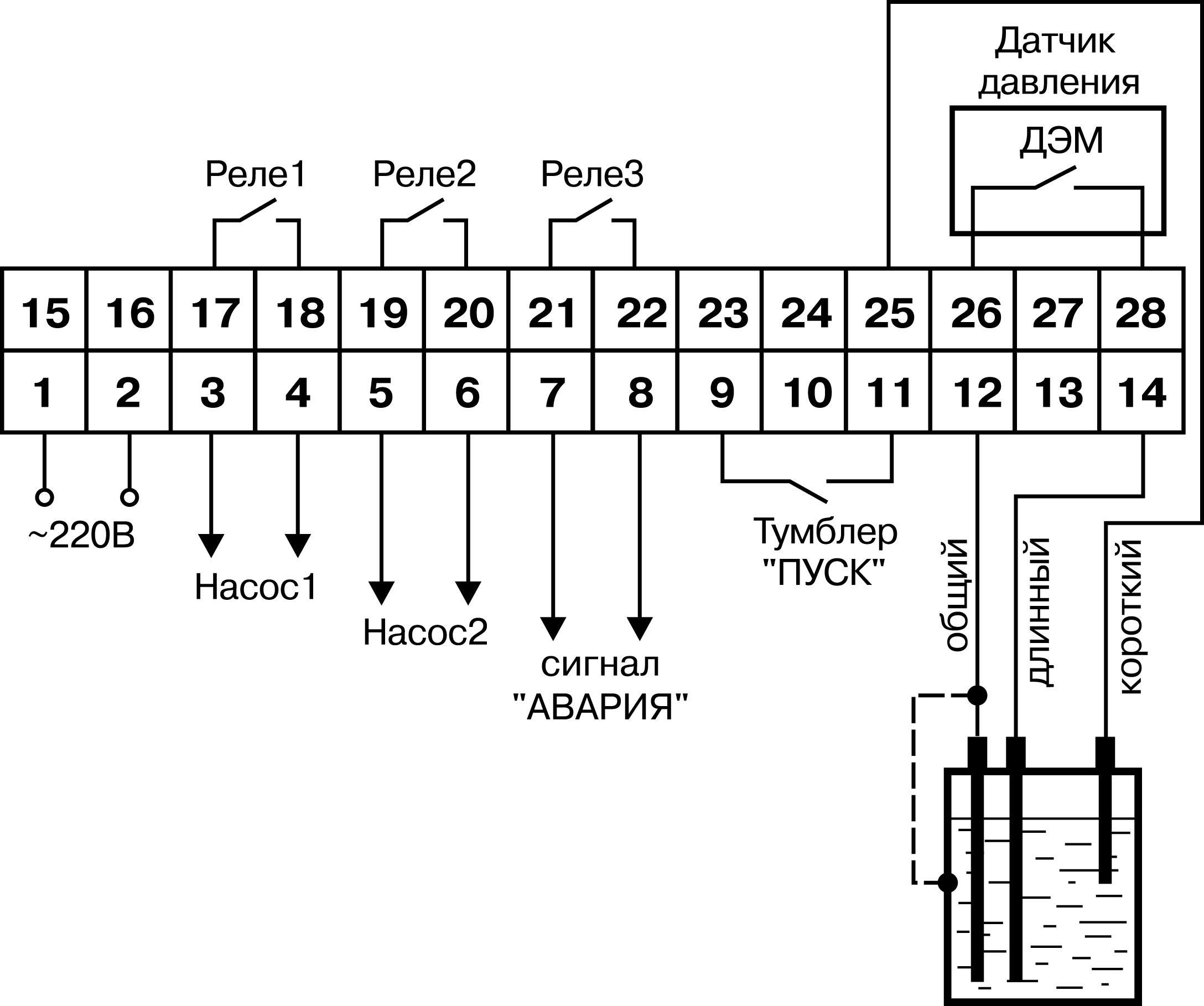
Алгоритм 12 (для одного резервуара и двух насосов)
Алгоритм предназначен для управления двумя работающими поочередно
насосами (основным и резервным), имеющими общий датчик наличия потока.
Предусмотрена возможность аварийной сигнализации или включения третьего
насоса. Схема подключения САУ-МП к элементам системы приведена на
рисунке ниже.
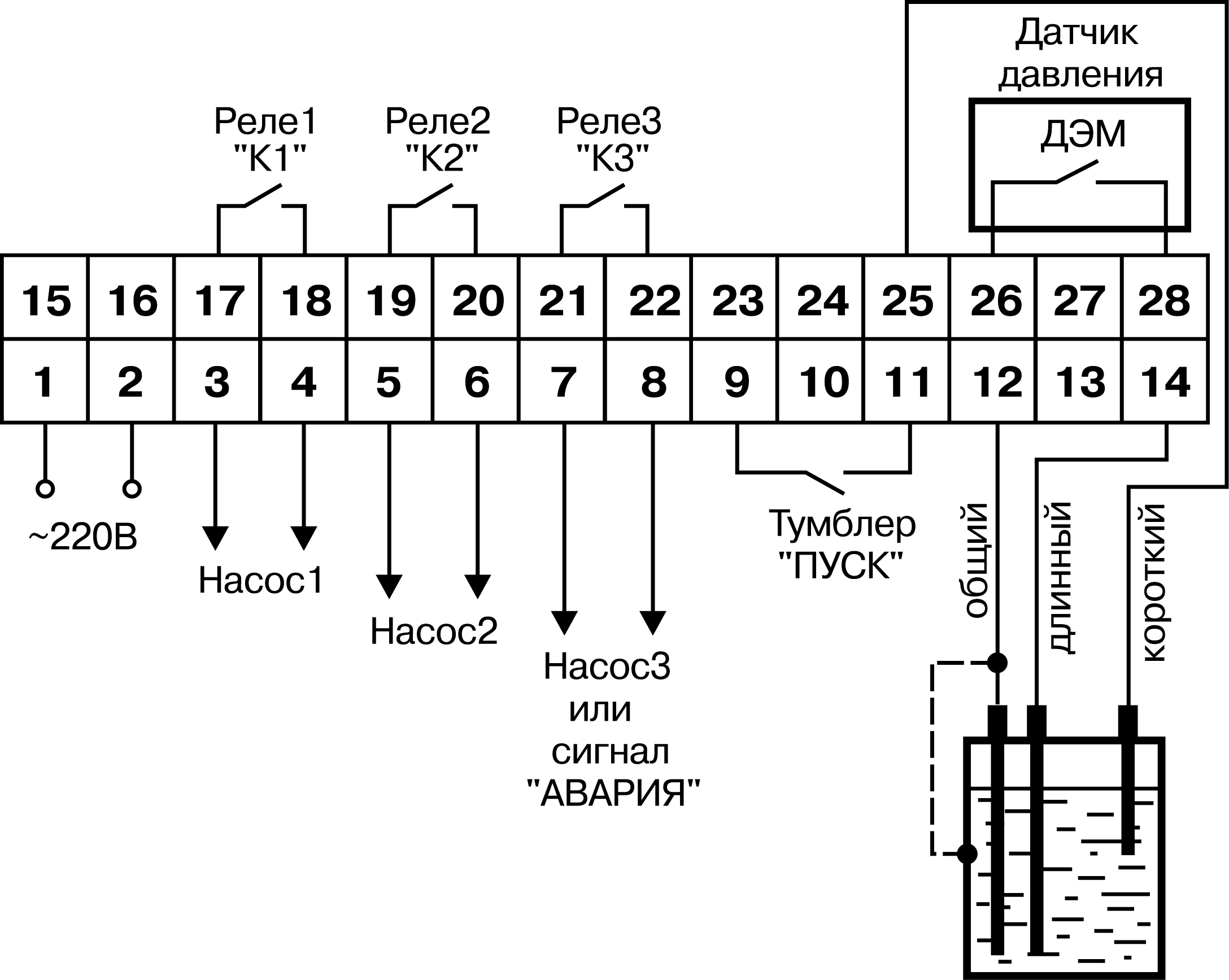
Датчик верхнего уровня подключается к второму входу прибора, датчик
нижнего уровня – к третьему. К первому входу подключен тумблер, замкнутое
состояние которого разрешает начать выполнение алгоритма. Датчик наличия
потока ДЭМ подключается к четвертому входу прибора.
Реле1 и 2 управляют работой основного и резервного насоса.
Алгоритм работы:
- После включения питания САУ-МП отрабатывает задержку включения
Т0, а затем проверяет состояние входа 1. Если тумблер замкнут, то
проверяется состояние длинного электрода (вход 3). Если длинный электрод
осушен, то включается реле 1, управляющее первым насосом. - Если в течение заданного времени в трубе создается необходимое
давление, контакты датчика наличия потока замыкаются, и первый насос
работает до затопления датчика верхнего уровня. В следующий раз в
случае осушения датчика нижнего уровня включится реле 2, и заполнять
емкость будет второй насос. Таким образом обеспечивается равномерный
износ основного и резервного насоса. - Если во время работы одного из насосов контакты ДЭМ разомкнулись
на время, большее заданного, прибор считает, что произошла авария
и включает резервный насос. Неисправный насос выключается, а соответствующий
ему светодиод (К1 или К2) начинает мигать. - Если в процессе работы вышли из строя оба насоса, то начинают
мигать оба светодиода К1 и К2.
Алгоритм 13 (для магистрали водоснабжения с двумя насосами)
Алгоритм предназначен для управления двумя работающими поочередно
насосами (основным и резервным) в системах водоснабжения, имеющих
в своем составе общий датчик наличия потока.
Отличие данного алгоритма от алгоритма 11 состоит в логике
работы реле 3. Реле включается на заданное время каждый раз в случае
включения или осушения насосов.
Реле 3 в этом алгоритме использовано для переключения схемы питания
насосов из звезды в треугольник на время пуска, если этого требуют
условия их эксплуатации, или для создания паузы между переключением
насосов, необходимой для срабатывания отсечных клапанов.
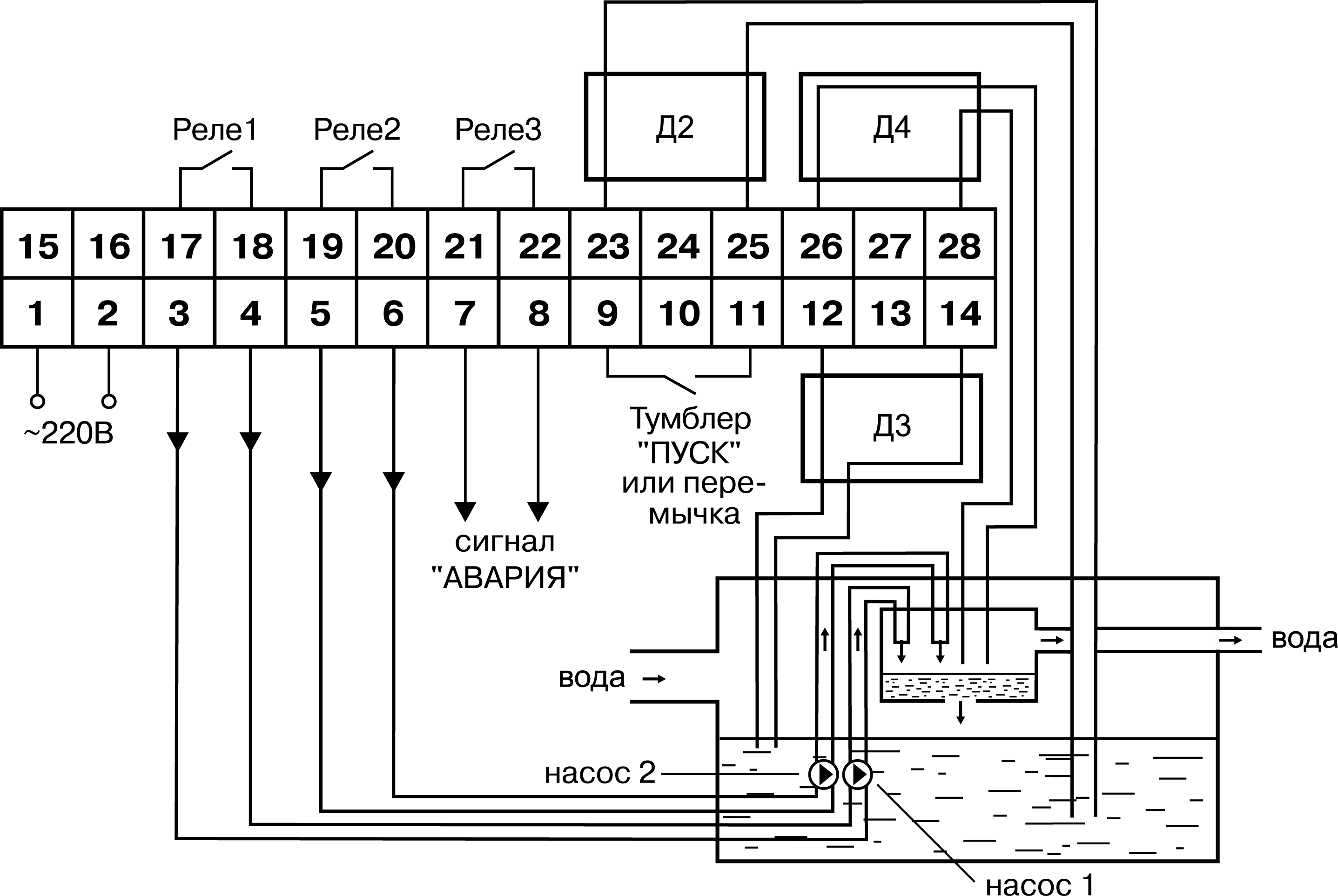
Алгоритм 14 (для одной магистрали и трех насосов)
Алгоритм предназначен для управления тремя насосами, которые работают
парами. Каждый насос имеет свой датчик наличия потока, замыкание контактов
которого свидетельствует о нормальной работе насоса. В автоматическом
режиме насосы работают поочередно парами (1-2, 1-3, 2-3, 1-2 и т.
д.) и по истечении заданного времени (например, 12 часов) происходит
переключение работающей пары насосов по схеме, приведенной на рисунке
ниже:

В случае выхода из строя любого из работающих насосов по сигналу
соответствующего датчика давления включается третий резервный насос.
Оставшиеся насосы работают не выключаясь до вмешательства или до выхода
из строя. О выходе насоса из строя сигнализирует миганием соответствующий
светодиод (К1, К2, К3).
Схема подключения САУ-МП к элементам системы приведена на рисунке
ниже.
Тумблер «ПУСК» выполняет функцию дистанционного выключателя, а
также использован для аварийной защиты. Если в дистанционном управлении
нет необходимости, на месте тумблера (вход 4) следует установить перемычку.
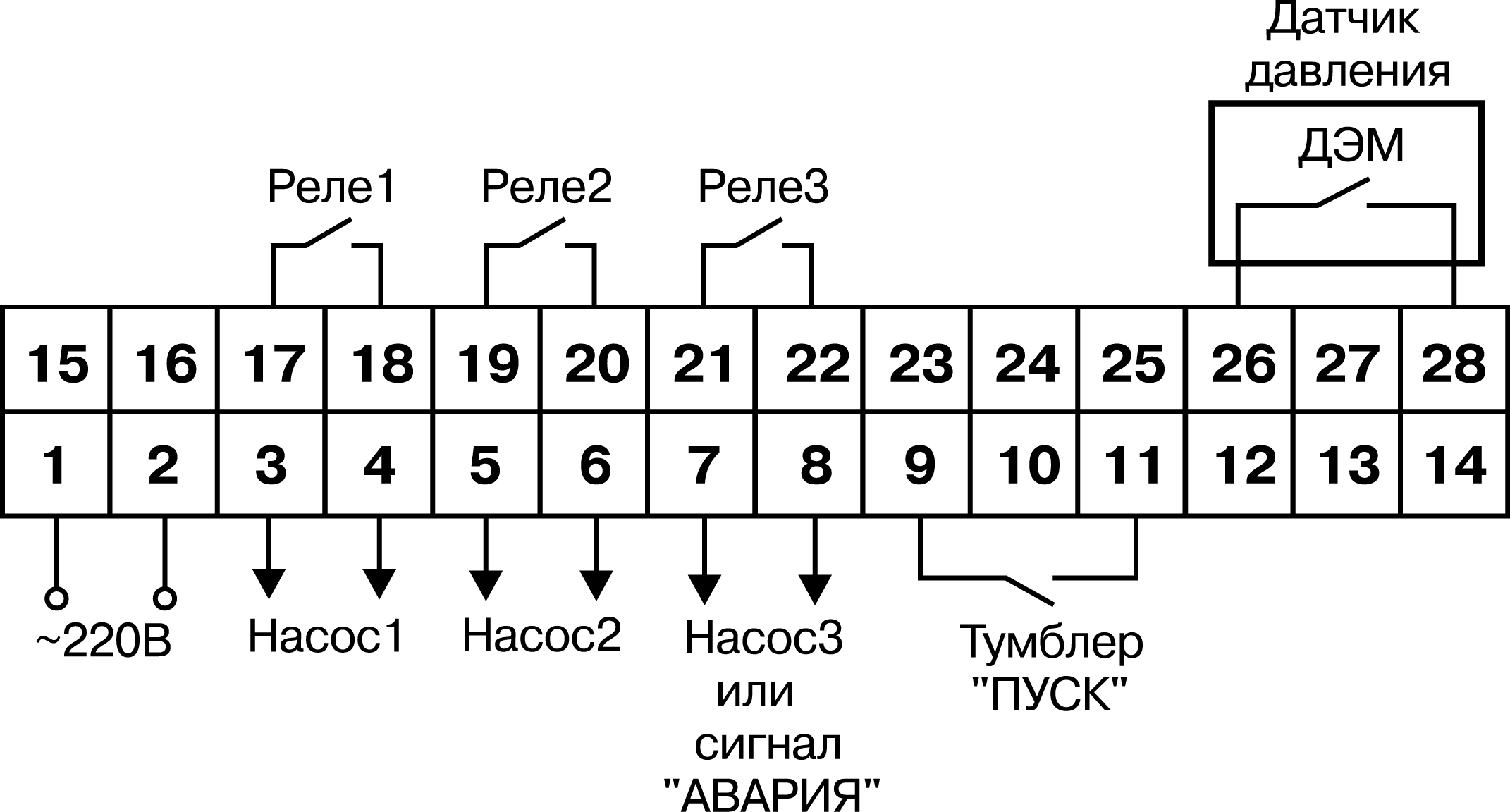
Алгоритм 15 (для магистрали водоснабжения с двумя насосами)
Алгоритм предназначен для управления двумя работающими поочередно
насосами (основным и резервным) в системах водоснабжения, имеющих
в своем составе общий датчик потока.
Отличие данного алгоритма от алгоритма 11 состоит в логике работы
реле 3. Реле включается не только в случае отказа обоих насосов, но
и в случае отказа любого из них.
Схема подключения САУ-МП к элементам системы приведена на рисунке
ниже.
Реле 1 и 2 управляют работой основного и резервного насоса. Реле
3 включает сигнализацию об аварии одного из насосов. Датчик наличия
потока ДЭМ подключается к четвертому входу прибора.
К первому входу подключен тумблер (перемычка), замыкание которого
запускает выполнение алгоритма.
Алгоритм работы:
- После включения питания САУ-МП отрабатывает задержку включения
Т0, затем проверяет состояние входа 1 и, если тумблер замкнут, включает
первый насос. - Если в течение заданного времени в трубе создается необходимое
давление, контакты датчика давления замыкаются, первый насос продолжает
работать. По истечении заданного времени реле 1 выключается и включается
реле 2, управляющее вторым насосом. Если второй насос исправен, контакты
датчика давления ДЭМ останутся замкнутыми, второй насос продолжает
работать. - Через заданное время прибор выключит реле 2 и включит реле 1,
обеспечивая равномерный износ основного и резервного насосов. - Если во время работы одного из насосов контакты датчика давления
ДЭМ разомкнулись на время, большее заданного, или во время пуска двигателя
насоса через заданное время не замкнулись, прибор считает, что произошла
авария запускаемого насоса, выключает его. Неисправный насос выключается,
а соответствующий ему светодиод (К1 или К2) начинает
мигать. - Если в процессе работы оба насоса выли из строя, то оба светодиода
начинают мигать (К1 и К2). Если третий канал задействован
для аварийной сигнализации, реле 3 замыкается и мигает светодиод К3.
Алгоритм 16 (для одного резервуара и двух насосов)
Алгоритм предназначен для управления двумя работающими поочередно
насосами (основным и резервным), имеющими общий датчик наличия потока.
Предусмотрена возможность аварийной сигнализации или включения третьего
насоса. Отличие данного алгоритма от алгоритма 12 состоит в
том, что насосы работают на осушение расходного резервуара, а не на
его наполнение.
Схема подключения САУ-МП к элементам системы приведена на рисунке
ниже.
Датчик верхнего уровня подключается к второму входу прибора, датчик
нижнего уровня – к третьему входу. К первому входу подключен тумблер,
замыкание которого запускает выполнение алгоритма. Датчик наличия
потока ДЭМ подключается к четвертому входу прибора.
Реле 1 и 2 управляют работой основного и резервного насосов.
Работа алгоритма:
- После включения питания САУ-МП отрабатывает задержку включения
Т0, затем проверяет состояние входа 1. Если тумблер замкнут, то прибор
проверяет состояние короткого электрода (вход 2). Если короткий электрод
замкнут, то включается реле 1, управляющее первым насосом. Если в
течение заданного времени в трубе создается необходимое давление,
контакты датчика наличия потока замыкаются и первый насос работает
до осушения датчика нижнего уровня. В следующий раз в случае заливания
датчика верхнего уровня включится реле 2 и второй насос будет осушать
емкость. Таким образом обеспечивается равномерный износ основного
и резервного насоса. - Если во время работы одного из насосов контакты ДЭМ разомкнулись
на время, большее заданного, прибор считает, что произошла авария
и включает резервный насос. Неисправный насос выключается, а соответствующий
ему светодиод (К1 или К2) начинает мигать. - Если в процессе работы вышли из строя оба насоса, то оба светодиода
начинают мигать (К1 и К2). Если третий канал задействован
для аварийной сигнализации, реле 3 замыкается и мигает светодиод К3.
Алгоритм 17 (для одной магистрали и трех насосов)
Алгоритм предназначен для управления тремя насосами, работающими
поочередно. Каждый насос имеет свой датчик наличия потока, замыкание
контактов которого свидетельствует о нормальной работе насоса.
Работа алгоритма:
- В автоматическом режиме одновременно работает только один
насос. По истечении заданного времени работы происходит его выключение
и включение следующего насоса в порядке: Насос 1 → Насос 2 → Насос
3 → Насос 1 → Насос 2 и т. д. (цикл повторяется). -
Во время включения насоса в работу в течение определенного
времени (уставки Т1, Т13 и Т25 для первого, второго и третьего насосов
соответственно) не пконтролируются замыкания контактов датчика давления
данного насоса для того, чтобы насос набрал требуемые обороты. -
Если по окончании данного интервала контакты датчика давления
не замкнулись, то этот насос блокируется, о чем сигнализирует миганием
соответствующий светодиод. После включается следующий по порядку исправный
насос. -
То же самое происходит, если во время работы насоса контакты
его датчика давления размыкаются на время, большее заданного (уставки
Т3, Т15 и Т28 для первого, второго и третьего насосов соответственно). -
В дальнейшем работают два оставшихся исправных насоса.
В случае выхода из строя еще одного насоса, последний исправный насос
работает не выключаясь до вмешательства извне или до выхода из строя.
Алгоритм 18 (для одного резервуара и двух насосов)
Алгоритм предназначен для управления насосной установкой, состоящей
из двух насосов (основного и резервного), которые работают на осушение
емкости. Для контроля уровня жидкости в емкости используется два погружных
кондуктометрических датчика – датчик нижнего уровня Д2, подключенный
к Входу 2, и датчик верхнего уровня Д3, подключенный к Входу 3 (см.
рисунок ниже).
Отличие работы данного алгоритма от других состоит в отсутствии
датчика давления в магистрали, по состоянию контактов которого судят
об исправности насосов. Для определения исправности насосов в данной
установке используется небольшая контрольная емкость, через которую
насосы выкачивают жидкость. В ней установлен датчик уровня на высоте,
до которой один из насосов накачивает жидкость за заданное время.
Если за время, заданное в параметрах t1 или t13, датчик
затопляется, то работающий в данный момент насос считается исправным.
Другой особенностью данной установки является задержка включения
насоса после заливания жидкостью датчика верхнего уровня (Д3).
Работа алгоритма:
- Во время включения питания прибор контролирует состояние входа
3, т. е. проверяет осушение электродов датчика Д3. Если контакты датчика
замкнуты, прибор отсчитывает время Т25, после чего включает насос
1. Если контакты датчика разомкнуты, то прибор ждет замыкания. -
Насос выключается после осушения датчика Д2.
В случае
неисправности основного насоса 1 реле 1 выключается, включается резервный
насос 2, управляемый реле 2. Одновременно включается реле 3, сигнализируя
о неисправности насоса. В случае выхода из строя любого насоса (основного
или резервного) соответствующий светодиод («К1» или «К2») мигает с
частотой один раз в секунду. -
К входу 1 прибора подключен дистанционный включатель (тумблер ПУСК), выключающий работающий насос вне зависимости от состояния
датчиков. В случае включения тумблера ПУСК прибор начинает
работать аналогично работе при включении питания: снимаются блокировки
с неработающих насосов (одного или двух). Если дистанционный выключатель
не нужен, на контакты 9 и 11 следует установить постоянную перемычку
или тумблер.
Алгоритм 20 (поддержание уровня жидкости)
Внимание
Алгоритм работает только в режиме питания датчиков
от источника постоянного тока, встроенного в прибор.
Алгоритм предназначен для поддержания уровня жидкости (долива)
в основной емкости во время перекачки жидкости из любой другой, например,
водозаборной скважины или колодца. Для управления используются датчики
уровней и предусмотрена возможность включения аварийной сигнализации
о переполнении основной емкости (контактами реле 3), а также сигнализации
сухого хода насоса (контактами реле 2).
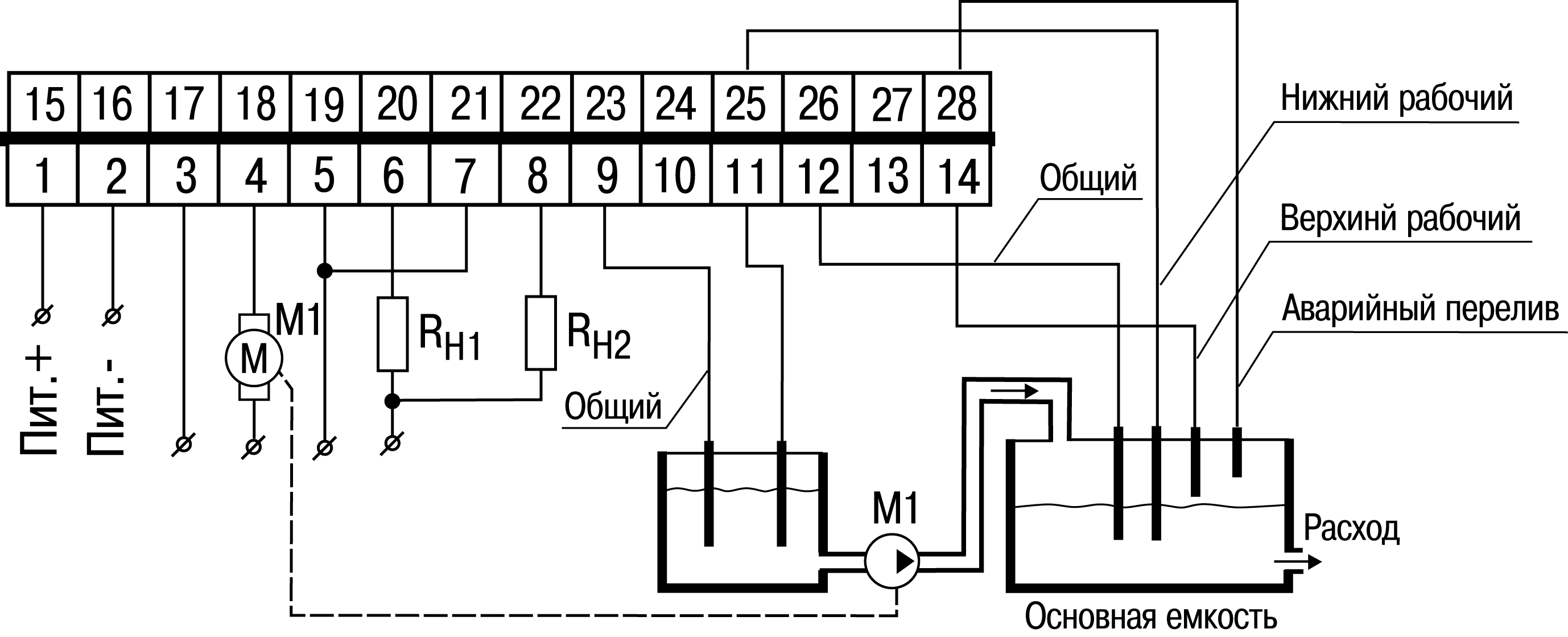
Пятиэлектродный кондуктометрический датчик устанавливается в емкости.
К входу 1 подключается электрод сухого хода, к входам 2 и 3 подключаются
датчики нижнего и верхнего рабочих уровней, соответственно к входу
4 подключается электрод перелива. Пятый электрод функционирует как
общий.
Выход 1 прибора защищает насос от сухого хода (последовательно
включается в цепь управления насосом). Выход 2 включает насос в зависимости
от уровня в емкости (система работает на долив от нижнего до верхнего
рабочего уровня). Выход 3 сигнализирует о переливе.
Для предотвращения преждевременного срабатывания защиты от сухого
хода введены задержки на включение/отключение реле 1 в случае смачивания/осушения
датчика «сухого хода» (Т1, Т2).
Для предотвращения преждевременного срабатывания защиты при переливе
введены задержки на включение/отключение реле 3 в случае смачивания/осушения
датчика «аварийного перелива» (Т25, Т26).
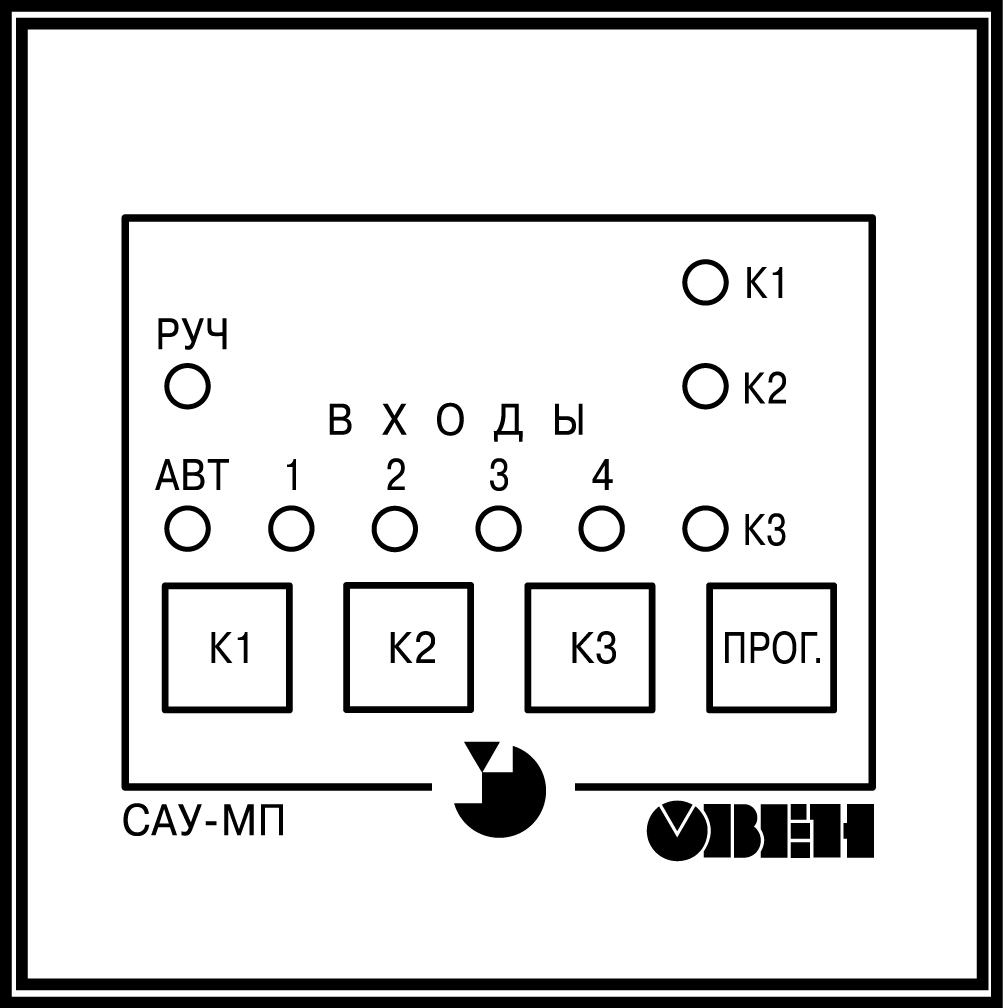
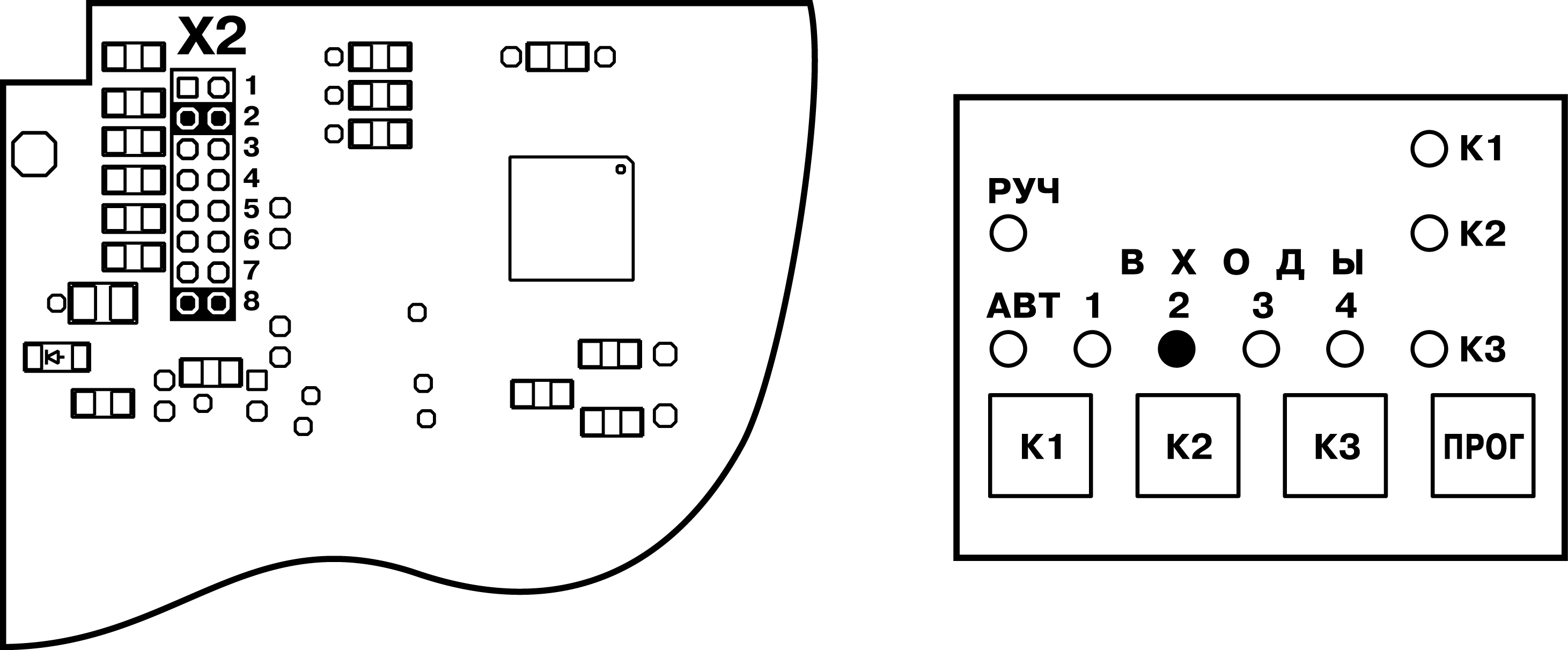
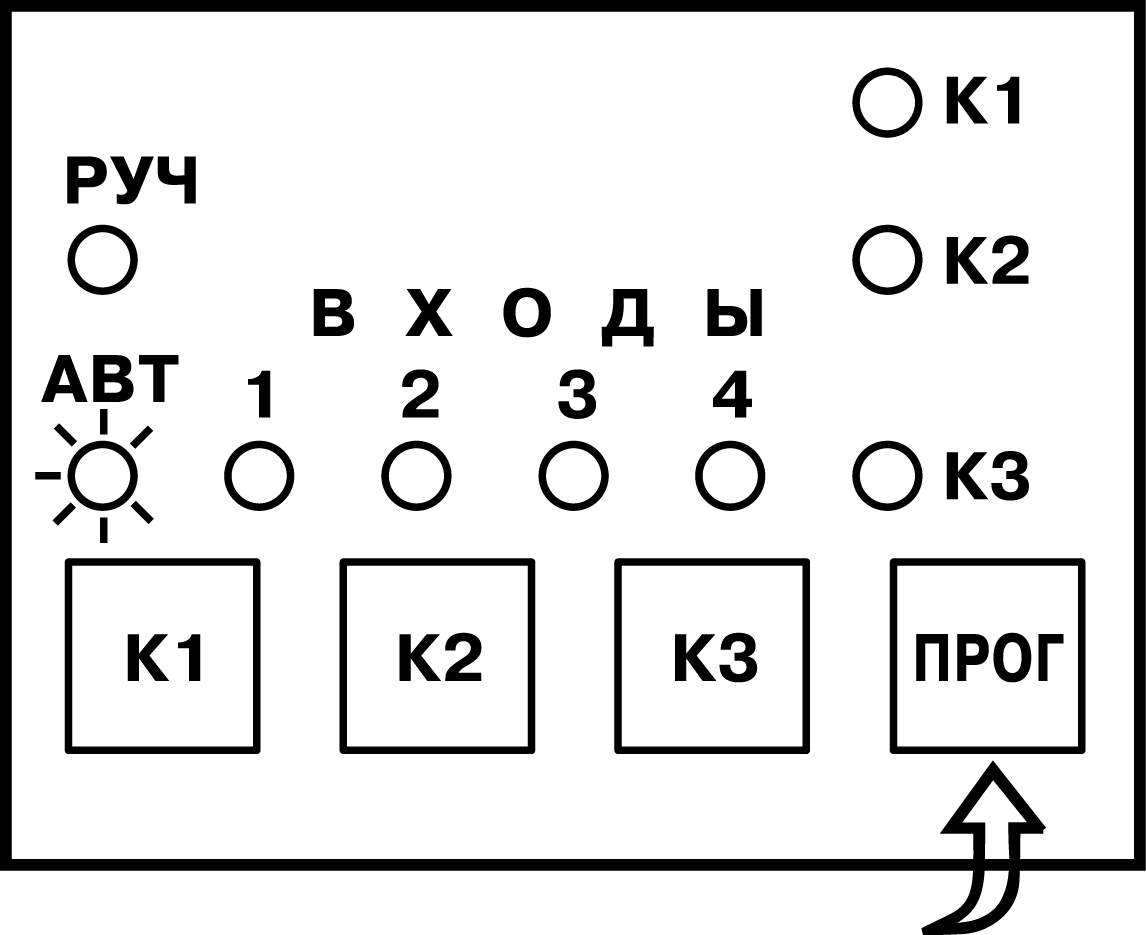
Индикация и управление
На лицевой панели прибора расположены элементы индикации и управления
(см. рисунок ниже):
- девять светодиодов;
- четыре кнопки.
Назначение светодиодов
|
Светодиод |
Состояние |
Значение |
|---|---|---|
| РУЧ |
Светится |
Прибор работает в ручном режиме работы |
| АВТ | Мигает | |
| РУЧ | Мигает | Прибор работает в автоматическом режиме работы |
| АВТ |
Светится |
|
| РУЧ | Мигает | Прибор работает в режиме отсчета задержки начала выполнения алгоритма |
| АВТ | Мигает | |
| Входы 1…4 |
Светится |
Уровень рабочего тела достиг соответствующего датчика |
| К1…К3 |
Светится |
Задействовано соответствующее выходное реле |
Назначение кнопок
|
Кнопка |
Режим эксплуатации прибора |
Значение |
|---|---|---|
 |
Работа | Переключение прибора между режимами — ручным и автоматическим |
| Прием/передача | Прием и запись алгоритма в энергонезависимую память |
|
| Задержка выполнения алгоритма | Переход к выполнению алгоритма |
|
 … …  |
Ручное управление | Управление соответствующим выходным реле |
 |
Прием/передача | Начало передачи алгоритма в другой прибор |
Работа с прибором
Прибор работает в ручном и автоматическом режимах
управления реле.
Если с платы индикации прибора удалены все перемычки, то после
подачи питания прибор переходит в режим отсчета задержки начала выполнения
алгоритма, заданной в уставке Т0 = 16 с. После окончания отсчета или кратковременного нажатия
на кнопку прибор переходит
к выполнению заданного алгоритма (в автоматическом режиме).
Прибор переводится в режим ручного управления нажатием и удержанием
кнопки в течение 3 с.
Во время работы в режиме ручного управления возможно включение
выходных реле прибора нажатием на одноименную кнопку К1, К2 или К3 независимо от состояния датчиков. Реакция на
кнопку происходит после ее отпускания. Длительность нажатия должна
быть не менее 2 с.
Прибор переводится в режим автоматического управления повторным
нажатием кнопки .
Настройка
Общие сведения
Настройка прибора заключается в установке значений опорных напряжений
входных компараторов, коррекции временных параметров и чувствительности
активных датчиков (при использовании их для контроля уровня).
Для настройки прибора следует:
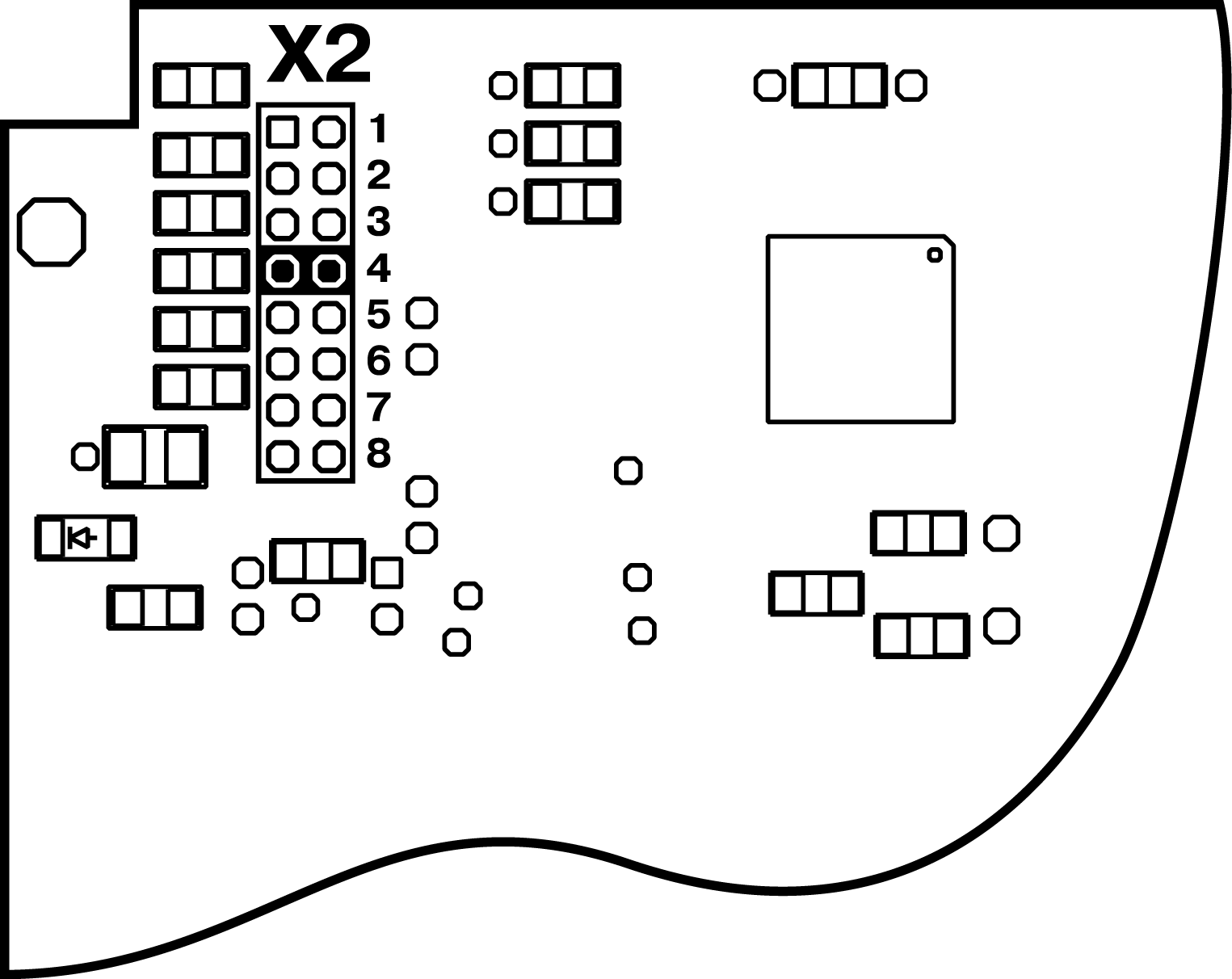
-
Перевести прибор в режим измерения напряжения на входах. Для
этого следует вскрыть обесточенный прибор и установить перемычку на
плате индикации в положение 4 (см. рисунок ниже). Установить перемычки Вх1, Вх2, Вх3 на плате блока питания в положение,
соответствующее используемым датчикам и закрыть корпус прибора.Положение перемычки на плате индикации в режиме измерения напряжения
на входах - Подключить к прибору датчики.
-
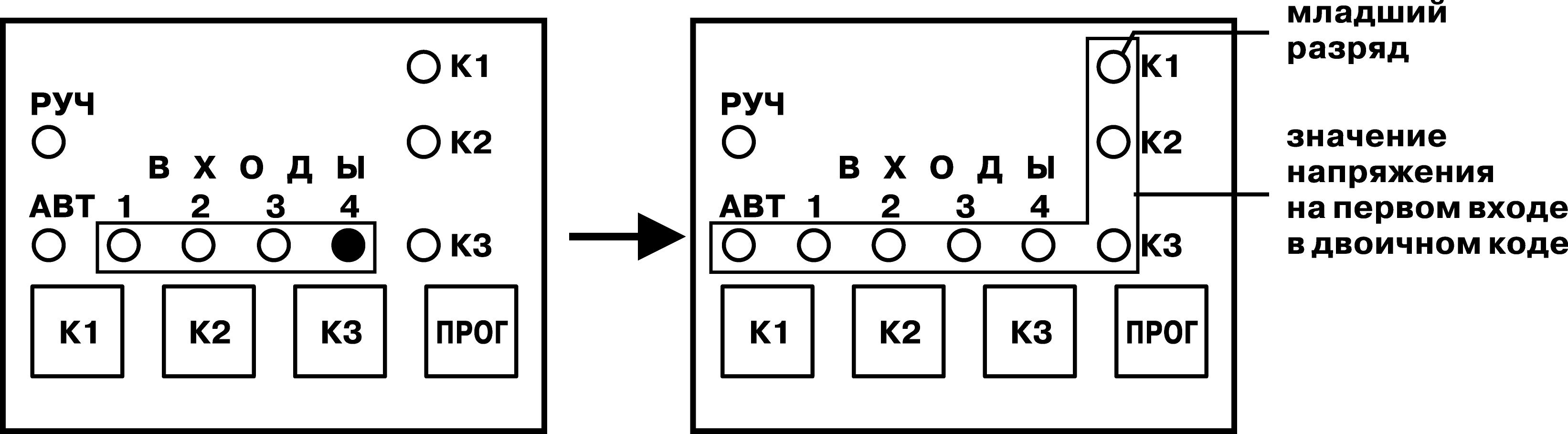
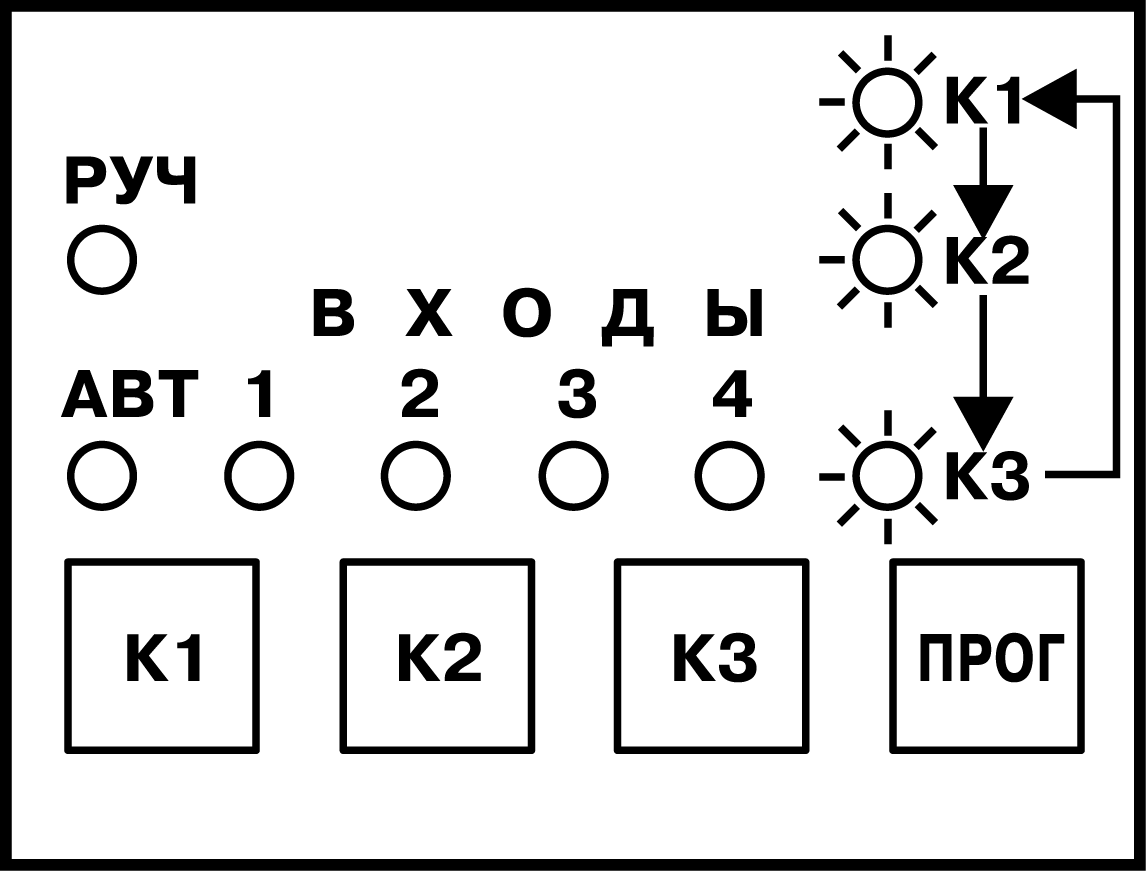
Подать на прибор питание. На передней панели прибора на 1 с
засветится светодиод 4, подтверждающий, что прибор работает
в режиме измерения напряжения на входах. Затем на индикаторах появится
значение напряжения на первом входе. Значение от 0 до 255 выдается
в двоичном коде на индикаторы: К1, К2, К3, ВХОДЫ 4, 3, 2, 1, АВТ, младший разряд на – К1 (см.
рисунок ниже).Индикация режима измерения тока на входах -
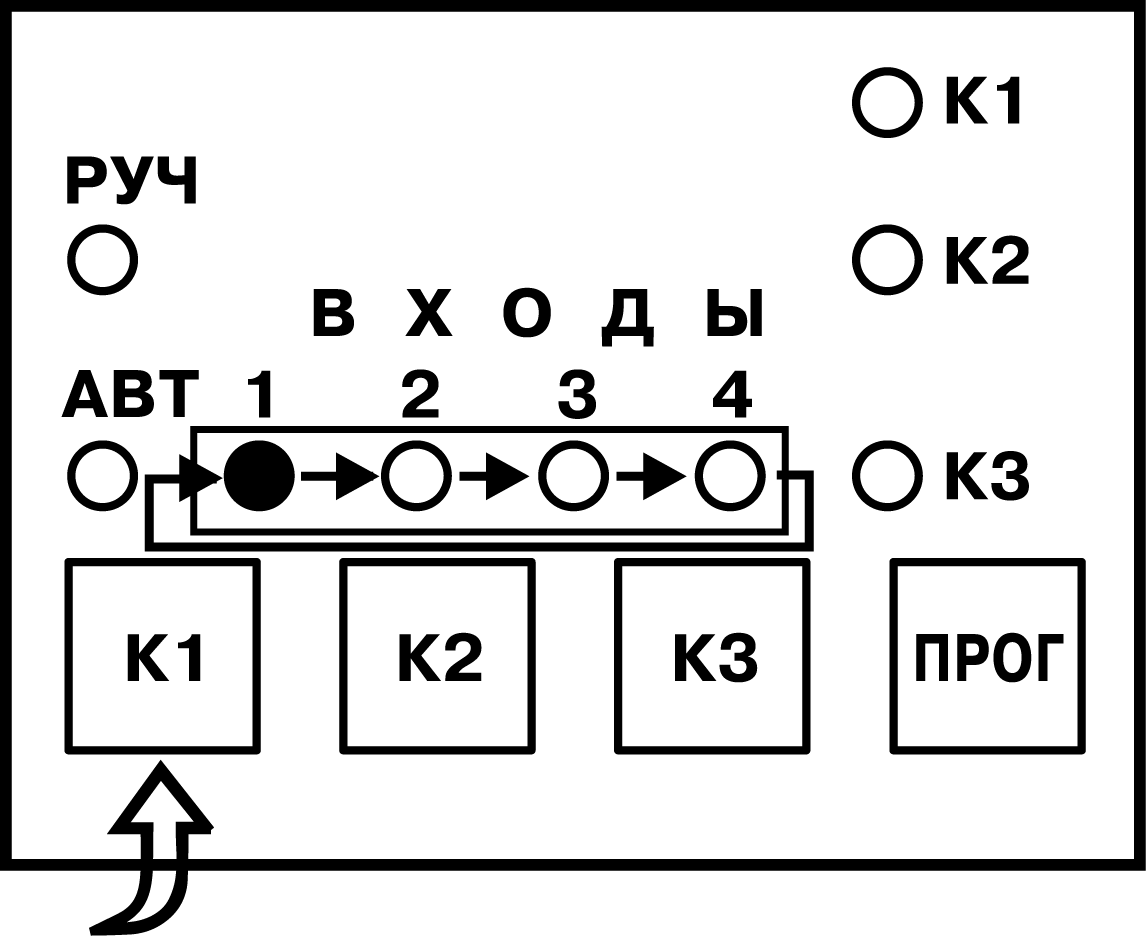
Для выбора следующего входа нажать и удерживать кнопку
. На передней панели по очереди
будут начинать светиться светодиоды 1, 2, 3, 4 и индицировать номер выбранного входа. Отпустить кнопку, когда будет выбран соответствующий
вход и на индикаторах отобразится текущее значение измеренного на
нем напряжения (см. рисунок ниже).Индикация смены входов - Записать показания прибора при затопленных и осушенных кондуктометрических
датчиках, при замкнутых и разомкнутых ключах или при установленных
пороговых значениях выходных сигналов с датчиков. - Снять питание с прибора, установить перемычку на плате индикации
в положение 3 и 8 основываясь на данных полученных измерений, установить
необходимые значения опорных напряжений для входных компараторов. - Снять питание с прибора, удалить перемычки с платы индикации и
вновь подать питание. - В случае использования кондуктометрических или активных датчиков
уровня постепенно заполнить резервуар, контролируя по мере замыкания
датчиков засветку соответствующих светодиодов на лицевой панели прибора. - Если резервуар заполнен, но любой из светодиодов не засвечен,
то следует изменить значение опорного напряжения или переставить перемычку
из положения 2 в положение 3 на нижней плате (при работе
с кондуктометрическими датчиками). - Постепенно опорожнить резервуар, контролируя последовательное
отключение соответствующих светодиодов на лицевой панели прибора. - Для проверки качества настройки следует повторно заполнить и опорожнить
резервуар, контролируя работу входных датчиков по светодиодам. - Вместо терморезистора подключить к соответствующему входу прибора
магазин сопротивлений и проконтролировать величину сопротивления датчика,
при которой срабатывает входное устройство. - В случае необходимости, пользуясь методикой, изложенной в разделе, откорректировать величину опорного
напряжения соответствующего входного устройства.
Прибор готов к эксплуатации.
Подготовка к работе
Предупреждение
Кабель и программное обеспечение для ПК в комплект
поставки не входит.
Порядок подготовки прибора:
- Занести в память прибора требуемые уставки таймеров и опорные
напряжения для входных устройств. - Проверить правильность выполнения алгоритма, имитируя срабатывание
входных датчиков. - Если алгоритм выполняется правильно — следует удалить все перемычки
с коммутационного поля Х2 платы индикации прибора. Прибор готов к
эксплуатации. - Если алгоритм выполняется неправильно, следует произвести его
загрузку из ПК или из другого «эталонного» прибора.
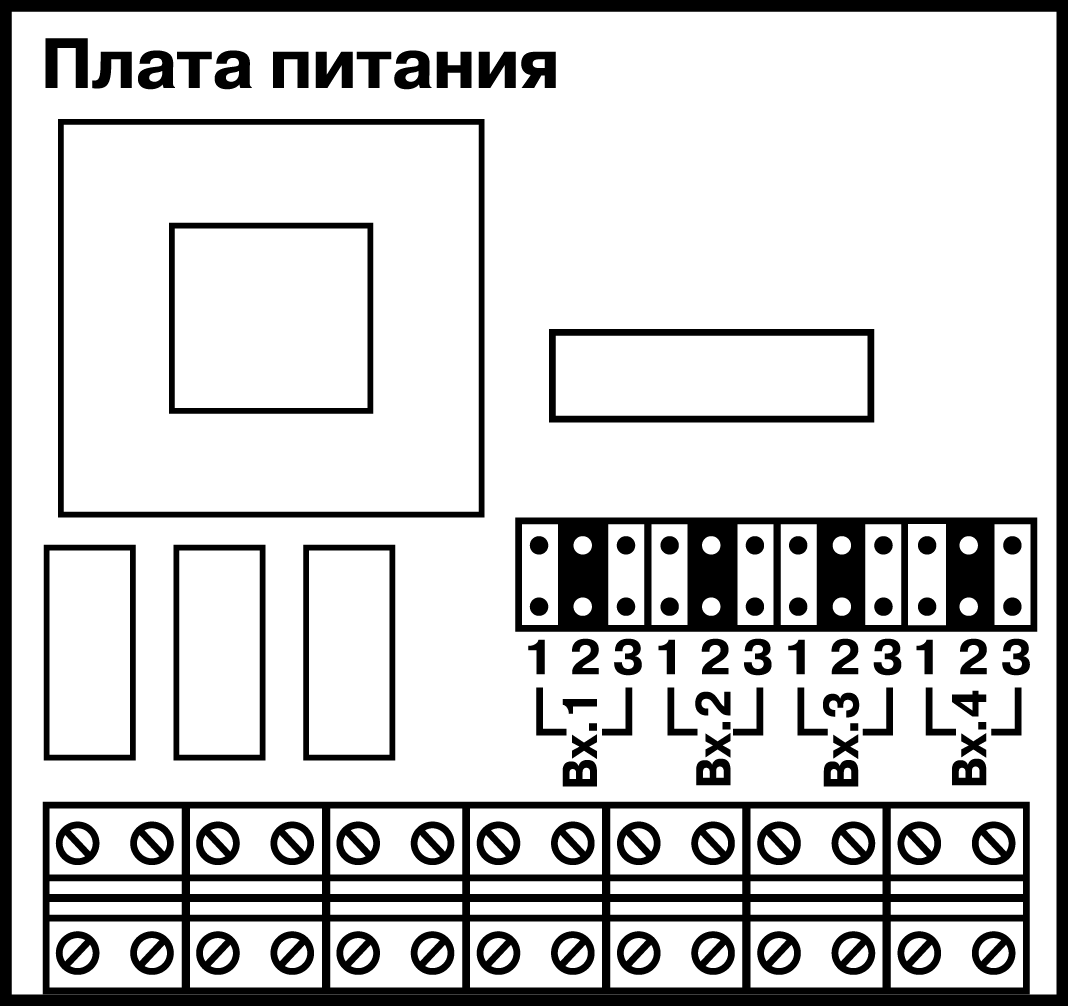
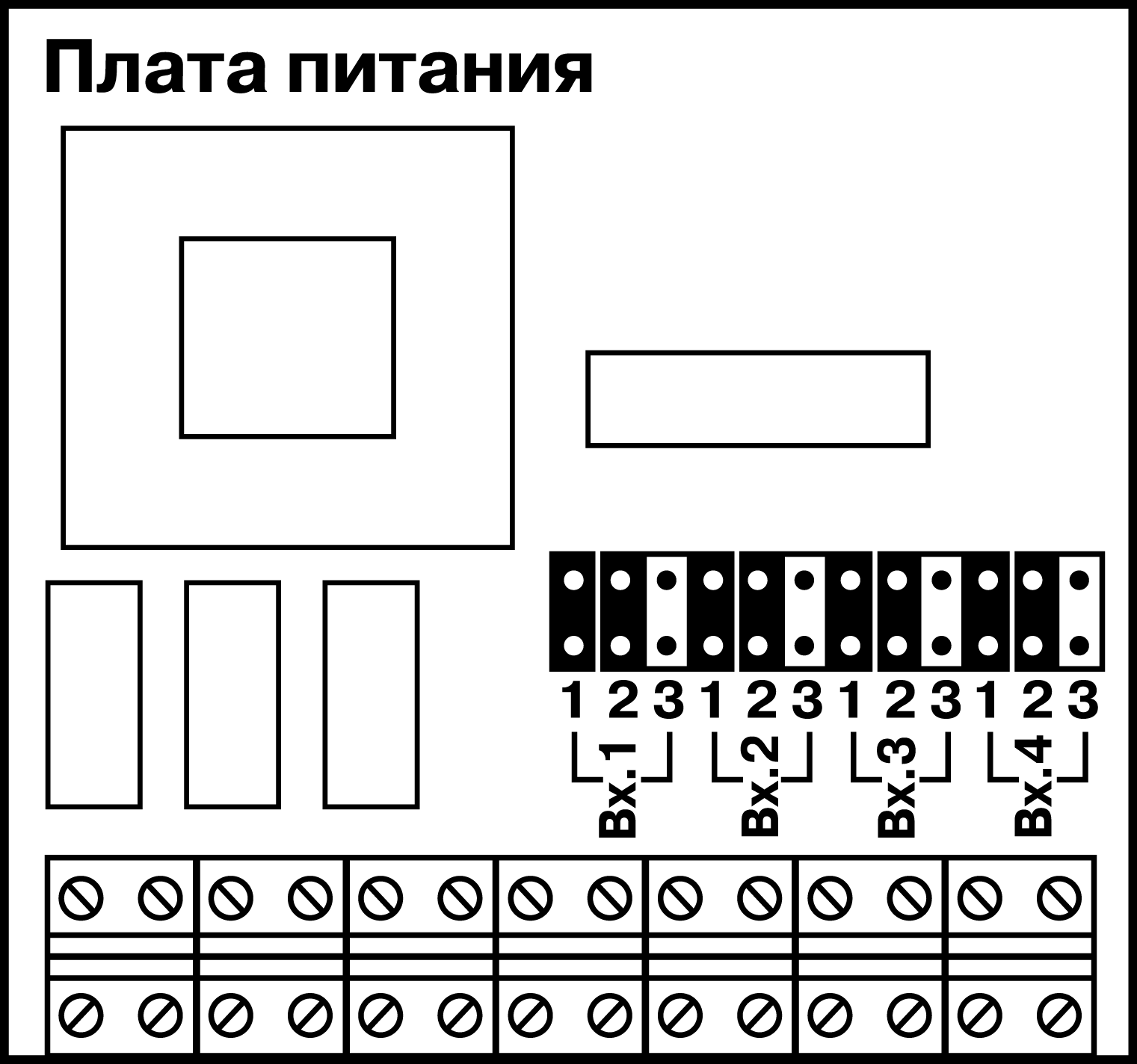
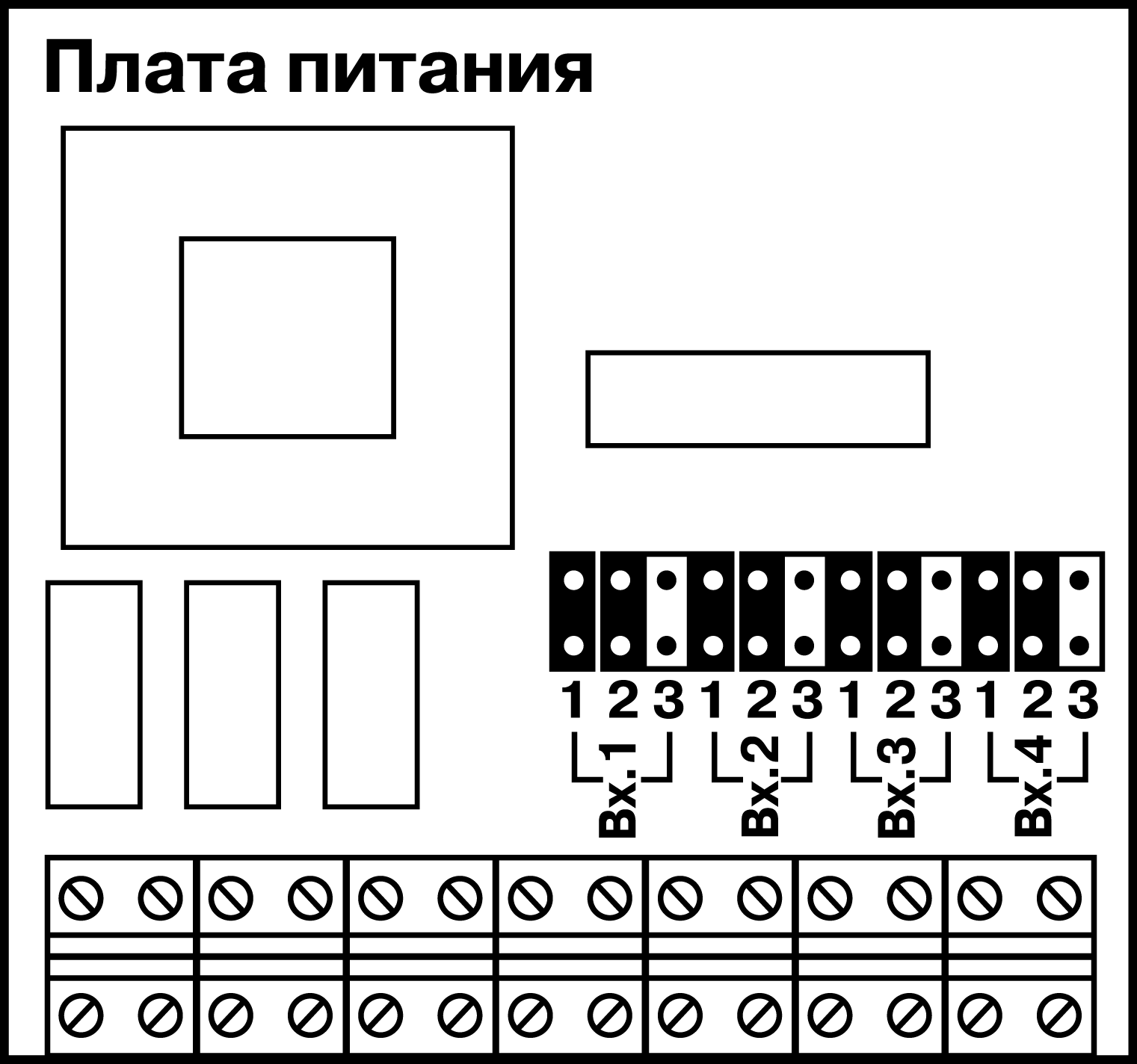
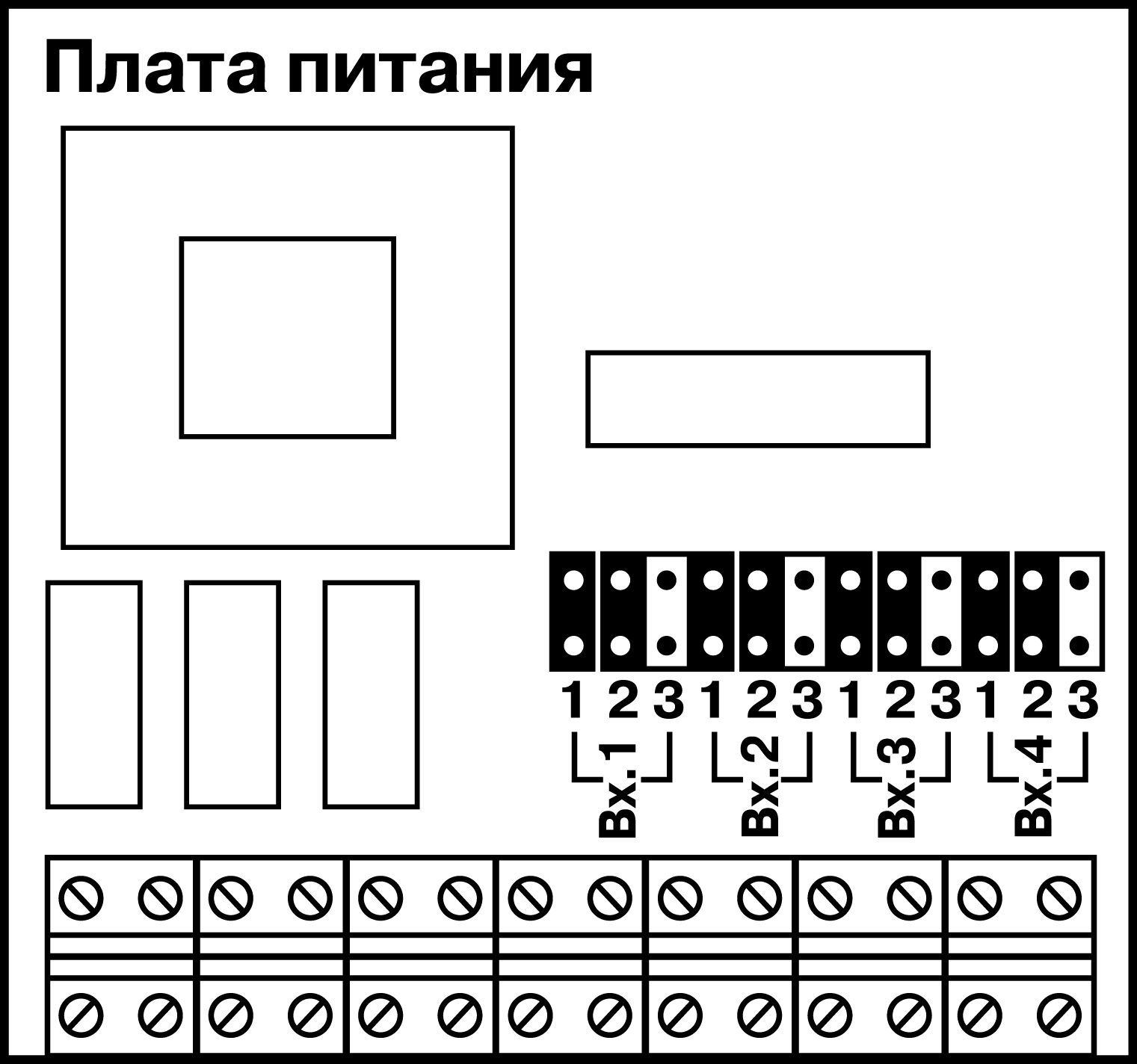
Настройка алгоритма 06
Положение перемычек Вх.1, Вх.2, Вх.3 и Вх.4, требуемое для работы данного алгоритма, показано на рисунке
ниже.
Уставки задержек и их значения:
- для первого насоса – Т1, Т2;
- для второго насоса – Т13, Т14;
- для третьего насоса – Т25, Т26.
Где Т1 = Т13 = Т25 = 7 с (по умолчанию) – время, в течение которого
не происходит изменение сигнала с 0 на 1 (выкл/вкл);
Т2 = Т14 = Т26 = 7 с (по умолчанию) – время, в течение которого
не происходит изменение сигнала с 1 на 0 (вкл/выкл).
Остальные уставки в работе данного алгоритма не используются, поэтому
их значение равно 0.
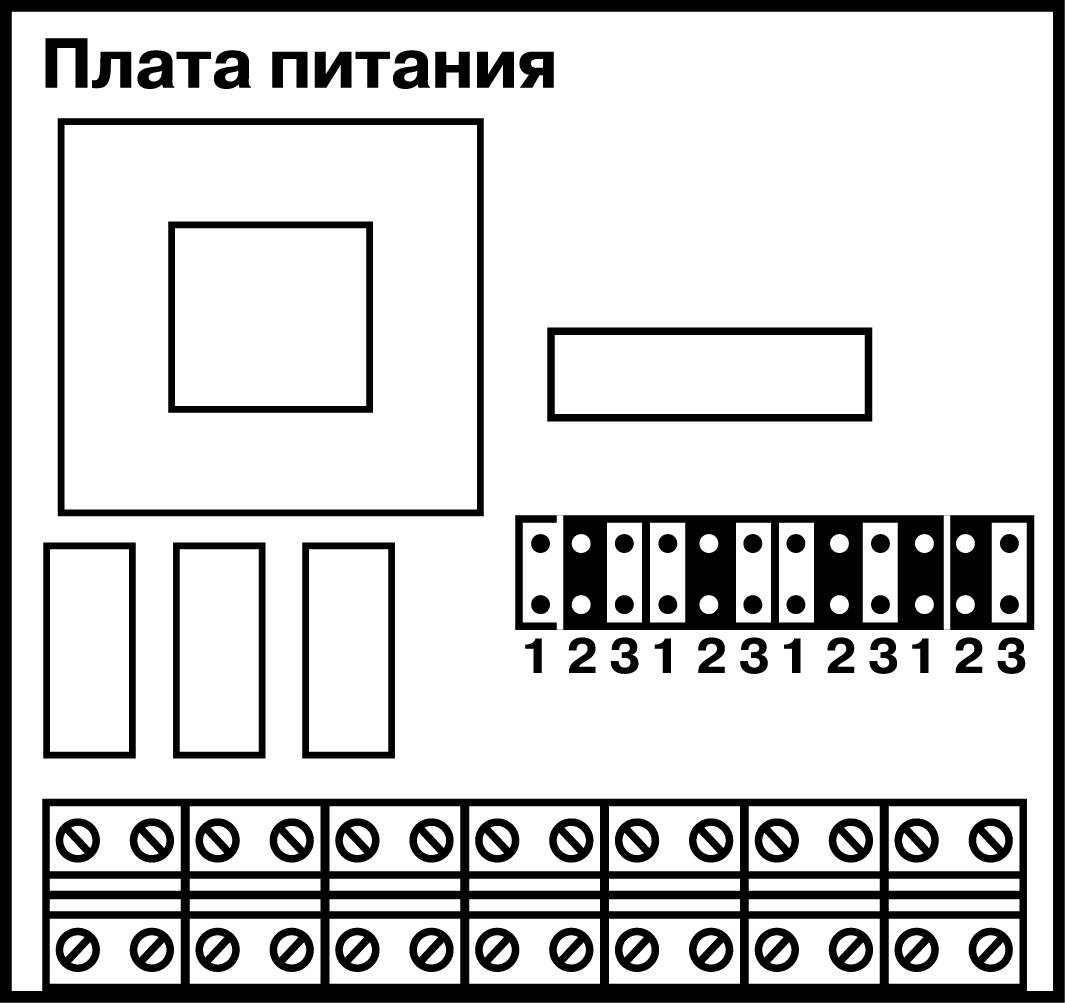
Настройка алгоритма 11
На рисунке ниже показано положение перемычек Вх.1, Вх.2 и Вх.3, требуемое для данного алгоритма.
Уставки задержек и их значения, установленные в приборе по умолчанию,
приведены ниже.
Уставки первого насоса:
- Т1 = 30 с – время, в течение которого во время запуска двигателя
насоса в данном канале не анализируются показания датчика давления; - Т3 = 2 с, Т4 = 2 с – время, в течение которого во время работы
двигателя насоса в данном канале допускаются «провалы» показаний датчика
давления; - Т7 = 1 с, Т8 = 1 с – длительность периодов включенного и выключенного
состояний светодиода насоса во время индикации отказа его двигателя.
Уставки второго насоса:
-
Т13 = 30 с – время, в течение которого во время запуска двигателя
насоса в данном канале не анализируются показания датчика давления; -
Т15 = Т16 = 2 с – время, в течение которого во время работы
двигателя насоса в данном канале допускаются «провалы» показаний датчика
давления; -
Т19 = Т20 = 1 с – длительность периодов включенного и выключенного
состояний светодиода насоса во время индикации отказа его двигателя.
Уставки, общие для прибора:
-
Т25 = 45 с, Т26 = 50 с – «учебные» значения, время работы первого
и второго насосов, для реальной работы должны иметь значения, например,
по 24 часа.
Настройка алгоритма 12
На рисунке ниже показано положение перемычек Вх.1, Вх.2, Вх.3 и Вх.4, требуемое для данного алгоритма.
Уставки задержек и их значения, установленные в приборе по умолчанию,
приведены ниже.
Уставки первого насоса:
- Т1 = 30 с – время, в течение которого во время запуска двигателя
насоса в данном канале не анализируются показания датчика давления;
- Т3 = Т4 = 2 с – время, в течение которого во время работы двигателя
насоса в данном канале допускаются «провалы» показаний датчика давления; - Т7 = Т8 = 1 с – длительность периодов включенного и выключенного
состояния светодиода насоса во время индикации отказа его двигателя.
Уставки второго насоса:
- Т13 = 30 с – время, в течение которого во время запуска двигателя
насоса в данном канале не анализируются показания датчика давления; - Т15 = Т16 = 2 с – время, в течение которого во время работы двигателя
насоса в данном канале допускаются «провалы» показаний датчика давления; - Т19 = Т20 = 1 с – длительность периодов включенного и выключенного
состояния светодиода канала во время индикации отказа его двигателя.
Уставки, общие для прибора:
- для правильного выполнения алгоритма должны быть установлены значения
Т27 = 1 с, Т28 = 0 с.
Настройка алгоритма 13
На рисунке ниже показано положение перемычек Вх.1, Вх.2 и Вх.3, требуемое для данного алгоритма.
Уставки задержек и их значения, установленные в приборе по умолчанию,
приведены ниже.
Уставки первого насоса:
- Т1 = 30 с – время, в течение которого при запуске двигателя насоса
в данном канале не анализируются показания датчика давления; - Т3 = Т4 = 2 с – время, в течение которого во время работы двигателя
насоса в данном канале допускаются «провалы» показаний датчика давления; - Т5 = 3 с – задержка включения напряжения на двигатель по отношению
к включению сигнала на переключение «треугольник — звезда» во время
пуска двигателя; - Т7 = 1 с, Т8 = 1 с – длительность периодов включенного и выключенного
состояния светодиода насоса во время индикации отказа его двигателя
насоса.
Уставки второго насоса:
- Т13 = 30 с – время, в течение которого во время запуска двигателя
насоса в данном канале не анализируются показания датчика давления; - Т15 = Т16 = 2 с – время, в течение которого во время работы двигателя
насоса в данном канале допускаются «провалы» показаний датчика давления; - Т17 = 3 с – задает задержку включения напряжения на двигатель
по отношению к включению сигнала на переключение «треугольник — звезда»
во время пуска двигателя; - Т19 = Т20 = 1 с – длительность периодов включенного и выключенного
состояний светодиода канала насоса во время индикации отказа его двигателя.
Уставки, общие для прибора:
- задержки Т25 = Т27 = 20 с – отвечают за интервал времени, в течение
которого во время запуска двигателя насоса выдается сигнал переключения
«треугольник — звезда» в первом и втором каналах; - Т29 = 45 с, Т30 = 50 с – задают интервалы времени работы первого
и второго насосов соответственно. Для реальной работы должны иметь
значения, например, по 24 часа.
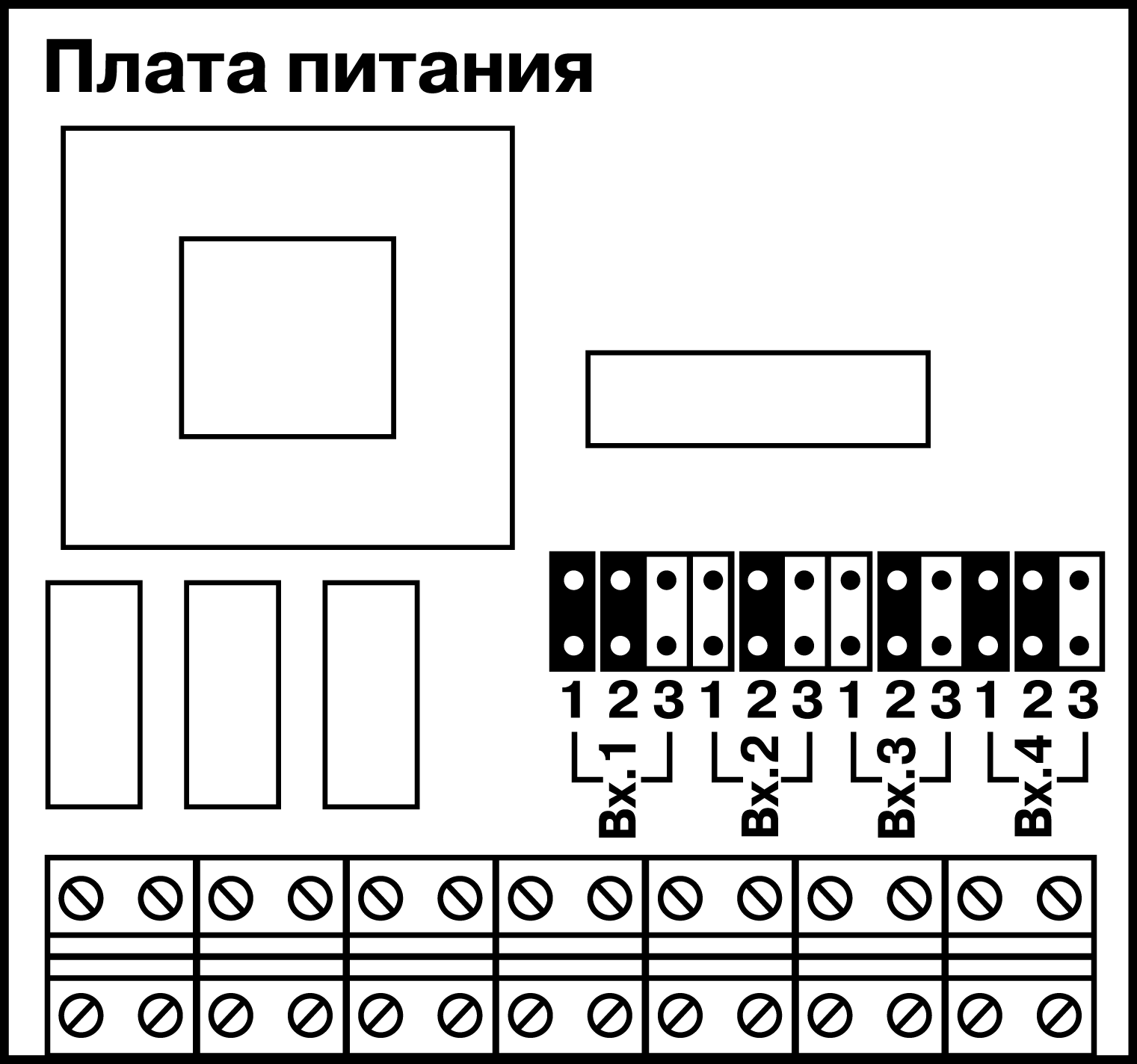
Настройка алгоритма 14
Расположение перемычек Вх.1, Вх.2, Вх.3, Вх.4, требуемое для работы данного алгоритма на рисунке ниже.
Уставки задержек и их значения, установленные в приборе по умолчанию,
приведены ниже.
Уставки первого насоса:
- Т1 = 30 с – время, в течение которого не анализируются показания
датчика давления Д1 во время запуска двигателя; - Т3 = Т4 = 2 с – время, в течение которого допускается кратковременное
замыкание и размыкание контактов датчика давления («провалы» показаний)
во время работы насоса; - Т7 = Т8 = 1 с – длительность периодов включенного и выключенного
состояний светодиода «К1» во время индикации отказа насоса.
Уставки второго насоса:
- Т13 = 30 с – время, в течение которого не анализируются показания
датчика давления Д2 во время запуска двигателя; - Т15 = Т16 = 2 с – время, в течение которого допускается кратковременное
замыкание и размыкание контактов датчика давления («провалы» показаний)
во время работы прибора; - Т19 = Т20 = 1 с – длительность периодов включенного и выключенного
состояний светодиода «К2» во время индикации отказа насоса.
Уставки третьего насоса:
- Т25 = 30 с – время, в течение которого не анализируются показания
датчика давления Д3 во время запуска двигателя; - Т27 = Т28 = 2 с – время, в течение которого допускается кратковременное
замыкание и размыкание контактов датчика давления («провалы» показаний)
во время работы насоса; - Т35 = Т36 = 1 с – длительность периодов включенного и выключенного
состояний светодиода «К3» во время индикации отказа насоса.
Уставки, общие для прибора:
- Т31 = Т32 = 30 с – длительность периодов работы насосов;
- Т33 = Т34 = 2 ∙ Т31 – задержки, необходимые для обеспечения правильной
работы алгоритма прибора; - Т9 = 5 с – время, в течение которого происходит задержка включения
первого насоса после включения второго насоса; - Т2 = Т14 = Т26 = 0, так как данные уставки в работе алгоритма
не используются.
Настройка алгоритма 15
На рисунке ниже показано положение перемычек Вх.1, Вх.2 и Вх.3, требуемое для данного алгоритма.
Уставки задержек и их значения, установленные в приборе по умолчанию,
приведены ниже.
Уставки первого насоса:
- Т1 = 30 с – время, в течение которого во время запуска двигателя
насоса в данном канале не анализируются показания датчика давления; - Т3 = Т4 = 2 с – время, в течение которого во время работы двигателя
насоса в данном канале допускаются «провалы» показаний датчика давления; - Т7 = Т8 = 1 с – длительность периодов включенного и выключенного
состояний светодиода насоса при индикации отказа его двигателя.
Уставки второго насоса:
- Т13 = 30 с – время, в течение которого во время запуска двигателя
насоса в данном канале не анализируются показания датчика давления; - Т15 = Т16 = 2 с – время, в течение которого во время работы двигателя
насоса в данном канале допускаются «провалы» показаний датчика давления; - Т19 = Т20 = 1 с – длительность периодов включенного и выключенного
состояний светодиода насоса во время индикации отказа его двигателя.
Уставки, общие для прибора:
- Т25 = 45 с, Т26 = 50 с – интервалы времени работы насосов первого
и второго каналов. Для реальной работы должны иметь значения, например,
по 24 часа.
Настройка алгоритма 16
На рисунке ниже показано положение перемычек Вх.1, Вх.2, Вх.3 и Вх.4, требуемое для данного алгоритма.
Уставки задержек и их значения, установленные в приборе по умолчанию,
приведены ниже.
Уставки первого насоса:
- Т1 = 30 с – время, в течение которого во время запуска двигателя
насоса в данном канале не анализируются показания датчика давления; - Т3 = Т4 = 2 с – интервал времени, в течение которого во время
работы двигателя насоса в данном канале допускаются «провалы» показаний
датчика давления; - Т7 = Т8 = 1 с – длительность периодов включенного и выключенного
состояний светодиода насоса во время индикации отказа его двигателя.
Уставки второго насоса:
- Т13 = 30 с – время, в течение которого во время запуска двигателя
насоса в данном канале не анализируются показания датчика давления; - Т15 = Т16 = 2 с – время, в течение которого во время работы двигателя
насоса в данном канале допускаются «провалы» показаний датчика давления; - Т19 = Т20 = 1 с – длительность периодов включенного и выключенного
состояний светодиода насоса во время индикации отказа его двигателя.
Уставки, общие для прибора: для правильного выполнения алгоритма
должны быть установлены значения Т27 = 1 с, Т28 = 0 с.
Настройка алгоритма 17
Положение перемычек такое же, как в настройке алгоритма
06.
Уставки задержек и их значения, установленные в приборе по умолчанию,
приведены ниже.
Уставки первого насоса:
- Т1 = 10 с – время, в течение которого не контролируется состояние
датчика давления во время включения насоса; - Т3 = Т4 = 2 с – время, в течение которого допускается кратковременное
размыкание (замыкание) контактов датчиков давления во время работы
насоса; - Т7 = Т8 = 1 с – длительность периодов включенного и выключенного
состояния светодиода насоса во время индикации отказа данного насоса; - Т9–Т12 = 0, так как данные уставки в работе алгоритма не используются.
Уставки второго насоса:
- Т13 = 10 с – время, в течение которого не контролируется состояние
датчика давления во время включения насоса; - Т15 = Т16 = 2 с – время, в течение которого допускается размыкание
контактов датчика давления во время работы насоса; - Т19 = Т20 = 1 с – длительность периодов включенного и выключенного
состояния светодиода насоса во время индикации отказа данного насоса; - Т9–Т12 = 0, так как данные уставки в работе алгоритма не используются.
Уставки третьего насоса:
- Т25 = 10 с – время, в течение которого не контролируется состояние
датчика давления при включении насоса; - Т27 = Т28 = 2 с – время, в течение которого допускается размыкание
контактов датчика давления во время работы насоса; -
Т29 – время, в течение которого задерживается сигнал блокировки
в случае отказа третьего насоса, необходимое для правильной работы
алгоритма прибора;ВниманиеЗадержку Т29 изменять категорически
не рекомендуется! - Т35 = Т36 = 1 с – длительность периодов включенного и выключенного
состояний светодиода насоса во время индикации отказа данного насоса.
Уставки, общие для прибора:
-
Т31 = Т32 – длительность периодов работы насосов;
ПредупреждениеОбычно Т31 = 12…24 часа.
- Т33 = Т34 = Т31 – задержки, необходимые для правильной работы
алгоритма прибора.
Настройка алгоритма 18
Уставки задержек и их значения, установленные в приборе по умолчанию,
приведены ниже.
Уставки первого насоса:
- Т1 = 30 с – время, в течение которого допускается незаливание
электродов датчика Д4 во время работы данного насоса (время на разгон
насоса и заполнение емкости); - Т3 = Т15 = 5 с – время, в течение которого допускается кратковременное
замыкание (размыкание) контактов датчика Д4 («антидребезг») при работе
данного насоса.
Уставки второго насоса:
- Т13 = 30 с – время, в течение которого допускается незаливание
электродов датчика Д4 во время работы данного насоса (время на разгон
насоса и заполнение емкости); - Т4 = Т16 = 5 с – время, в течение которого допускается кратковременное
замыкание (размыкание) контактов датчика Д4 («антидребезг») во время
работы данного насоса.
Уставки, общие для прибора:
- Т0 = 16 с – время от момента включения питания прибора до начала
выполнения алгоритма. Начать выполнять алгоритм до окончания задержки
можно нажатием кнопки ПРОГ; - Т25 = 35 с – время от момента заливания датчика Д2 верхнего уровня
до включения насоса (столь малое значение используется для проверки
функционирования прибора перед монтажом на насосную установку;
Значения остальных задержек изменять не рекомендуется.
Чтобы избежать поляризации датчиков и, вследствие этого, резкого
снижения их чувствительности датчики следует запитать от прибора переменным
напряжением. Для правильной работы прибора на переменном токе на коммутационной
плате прибора следует установить перемычки 3 для всех входов
(Вх.1, Вх.2, Вх.3 и Вх.4).
Настройка алгоритма 20
На рисунке ниже указано положение перемычек Вх.1, Вх.2, Вх.3 и Вх.4.
Уставки задержек и их значения, установленные в приборе по умолчанию,
приведены ниже:
- Т1 = 5 c – время, в течение которого не происходит замыкания реле
1 во время смачивания датчика «сухого хода»; - T2 = 5 c – время, в течение которого допускается осушение электродов
датчика «сухого хода» при работе насоса; - Т25 = 5 с – время от момента заливания датчика аварийного перелива
до замыкания реле 3; - Т26 = 5 с – время от момента осушения датчика аварийного перелива
до размыкания реле 3.
Копирование алгоритмов
Общие сведения
После включения прибора в одном из режимов программирования (режимы
с 1 по 3) на четырех красных светодиодах 1, 2, 3, 4 в течение 2 с
индицируется номер режима. Затем прибор начинает работу в соответствующем
режиме.
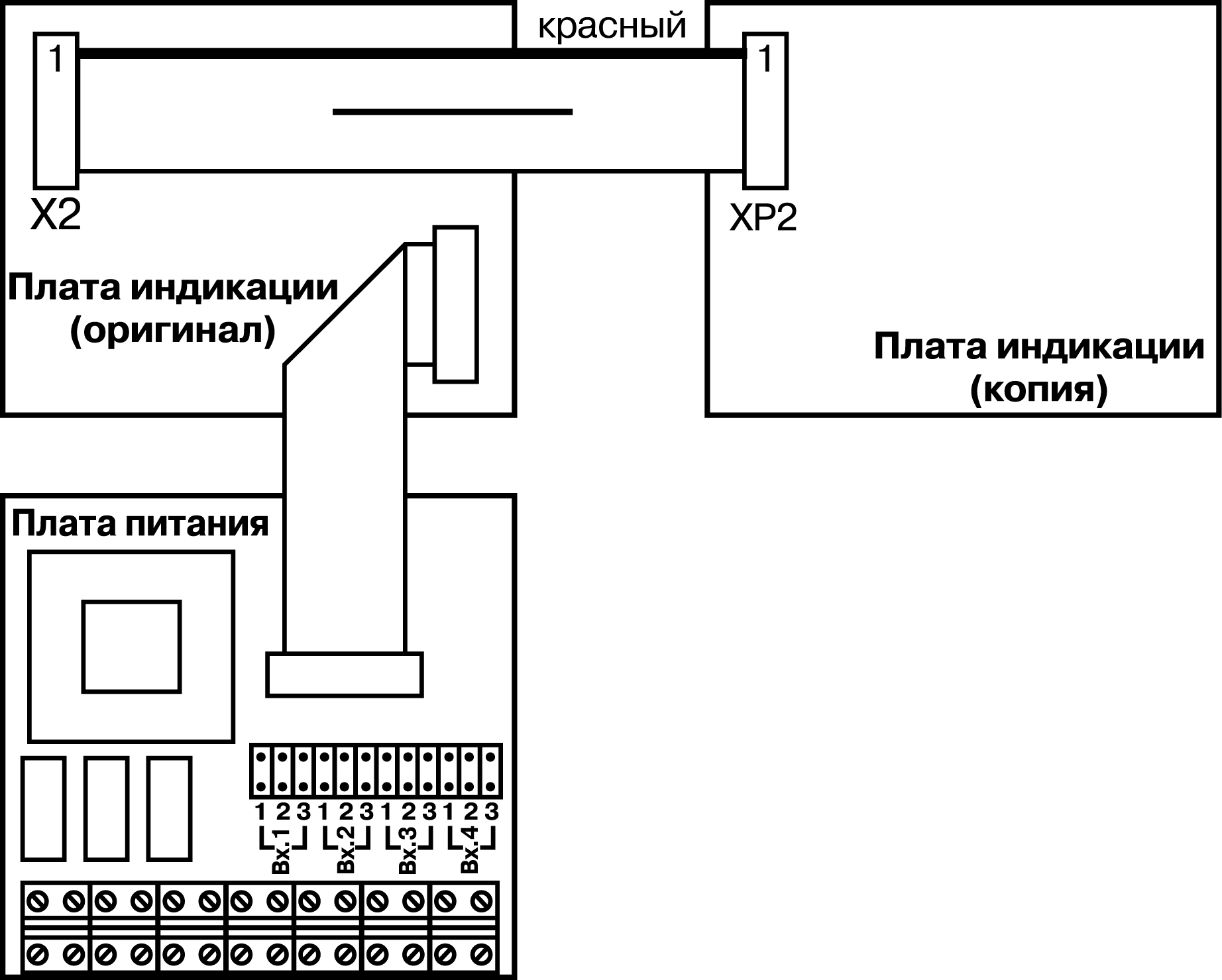
Копирование алгоритма из одного прибора в другой
Для копирования алгоритма из одного прибора в другой следует:
- Отсоединить плату индикации программируемого прибора от платы
питания. -
Соедините платы специальным кабелем № 1, как показано на рисунке
ниже.Соединение плат при копировании алгоритма ВниманиеСоединение производить только с обесточенными приборами.
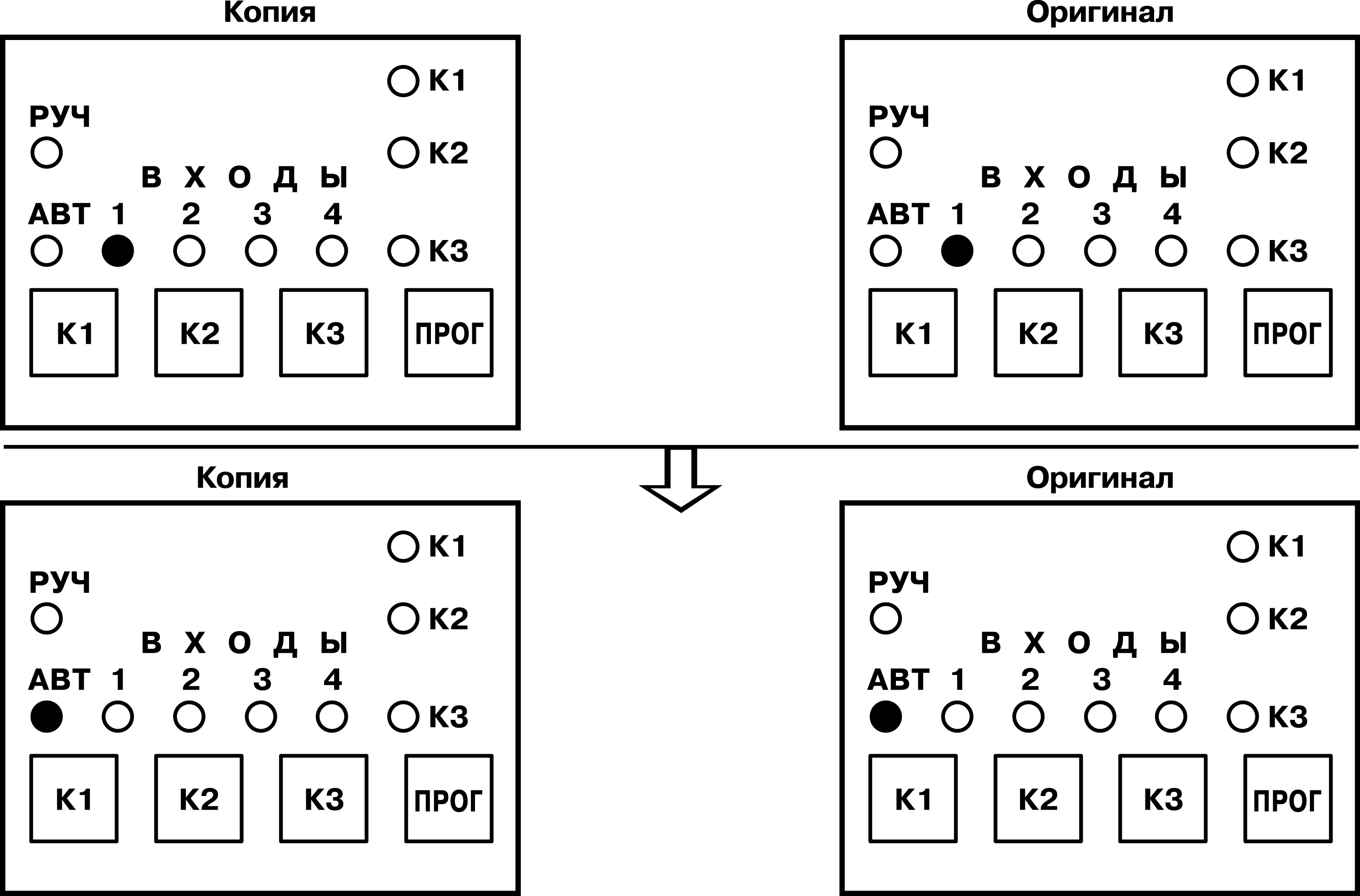
-
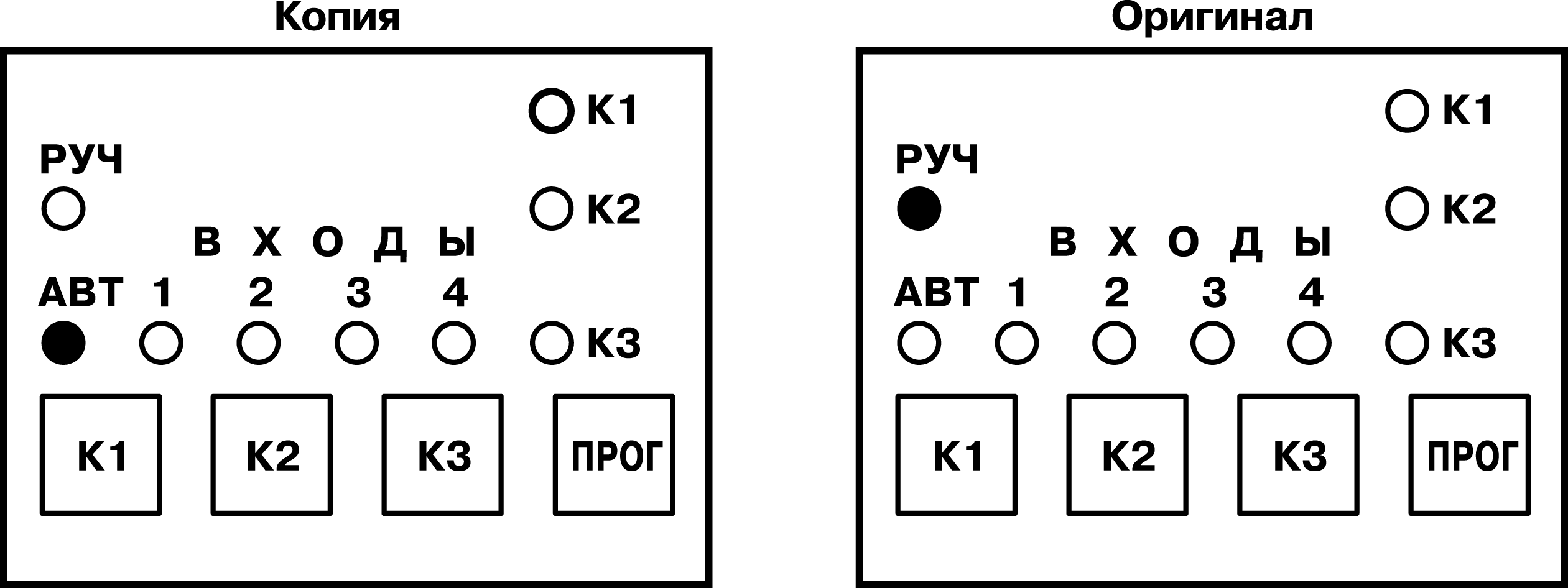
Подать питание на эталонный прибор.
На 1 с засветится
светодиод 1, индицируя номер режима, после чего оба прибора готовы
к приему алгоритма, о чем свидетельствует светящийся светодиод АВТ (см. рисунок ниже).Индикация при копировании -
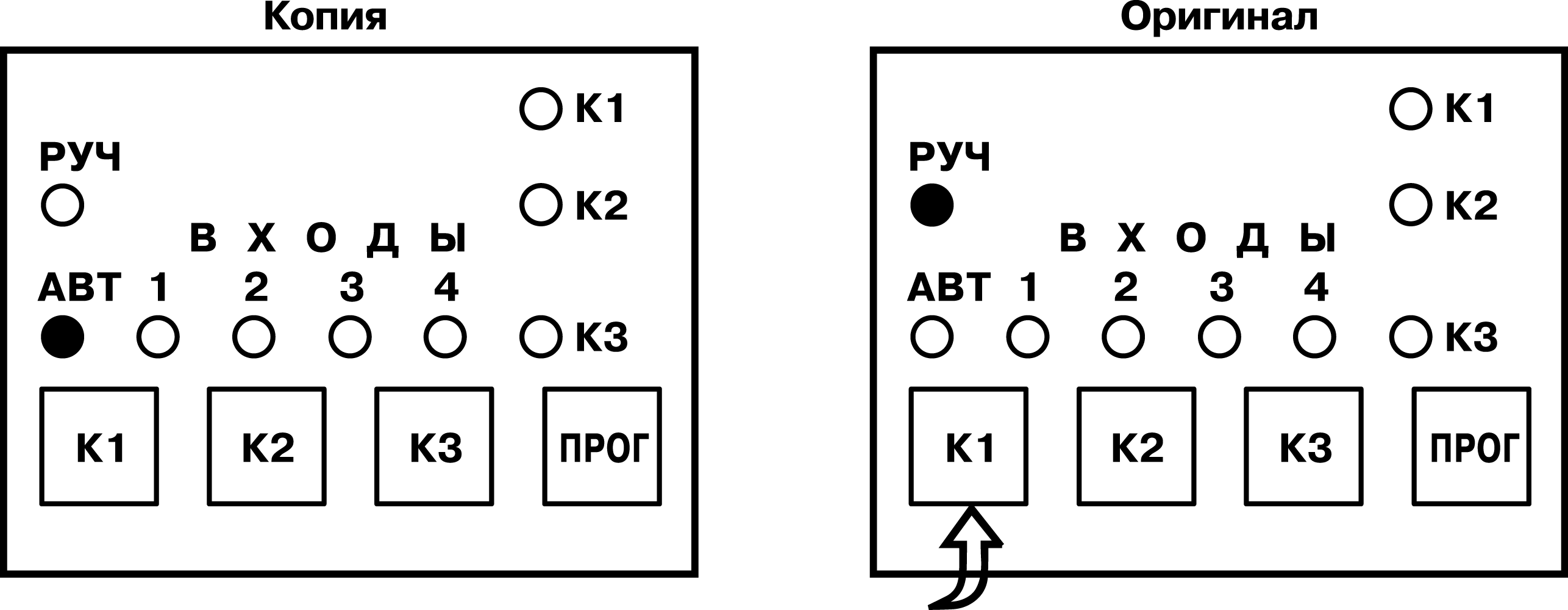
Нажатием на кнопку
перевести образцовый прибор в режим передачи. На панели прибора
включится светодиод РУЧ (см. рисунок ниже).Индикация
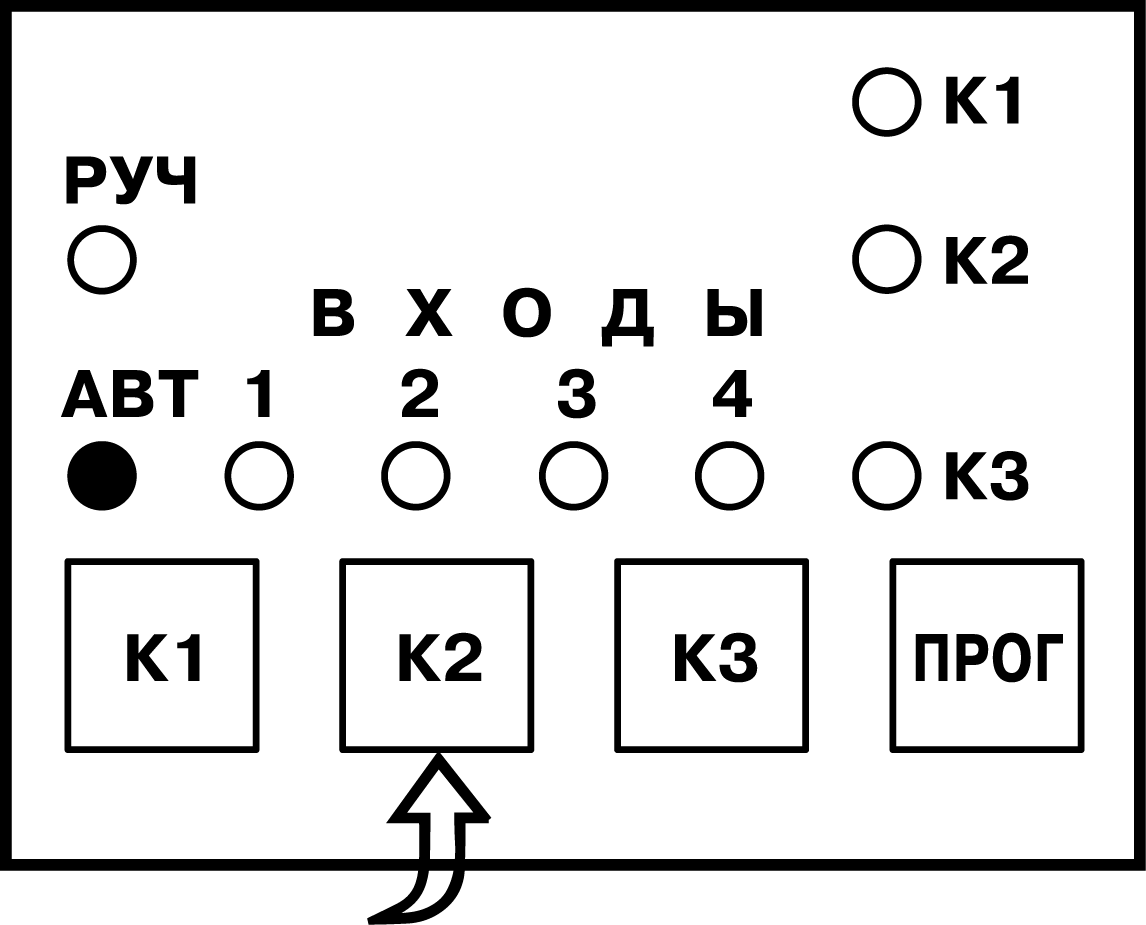
при передаче алгоритма -
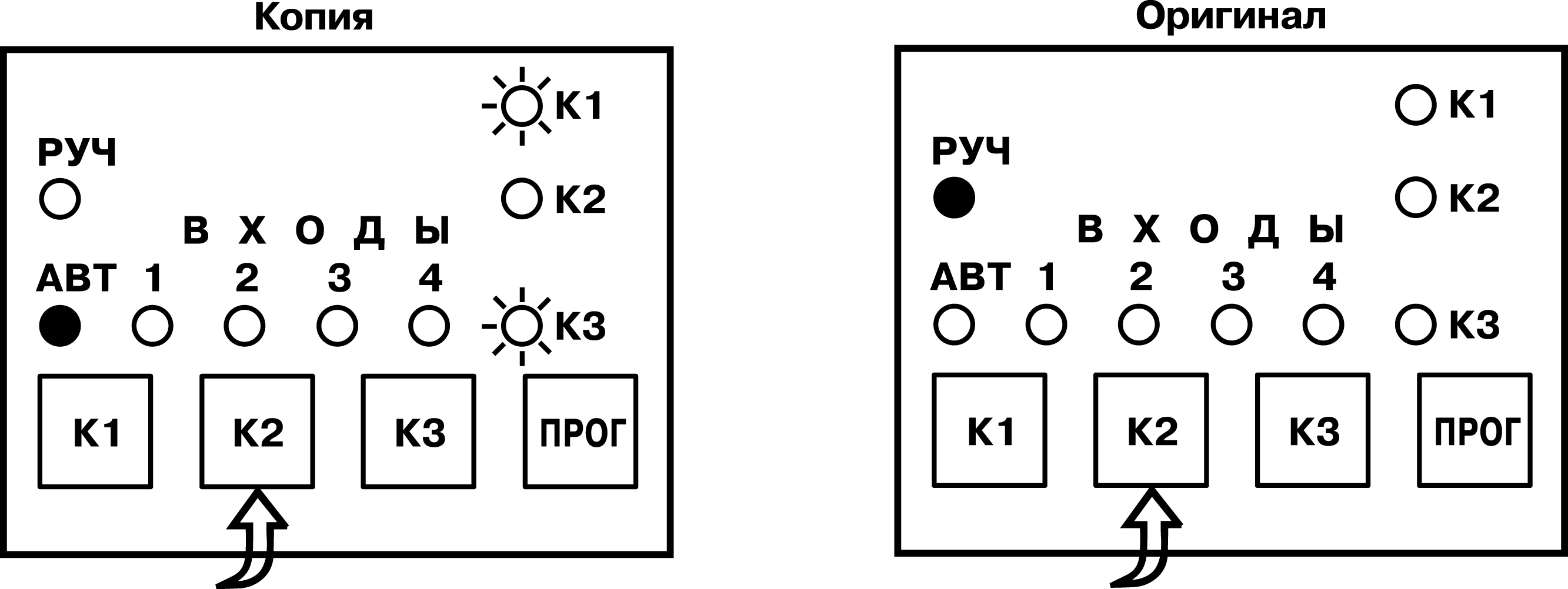
На принимающем приборе нажать кнопку
(см. рисунок ниже), чтобы перевести
прибор в режим ожидания приема. Режим индицируется поочередным миганием
светодиодов К1 и К3. Затем нажать кнопку. После этого загорится светодиод К3.Индикация при передаче алгоритма -
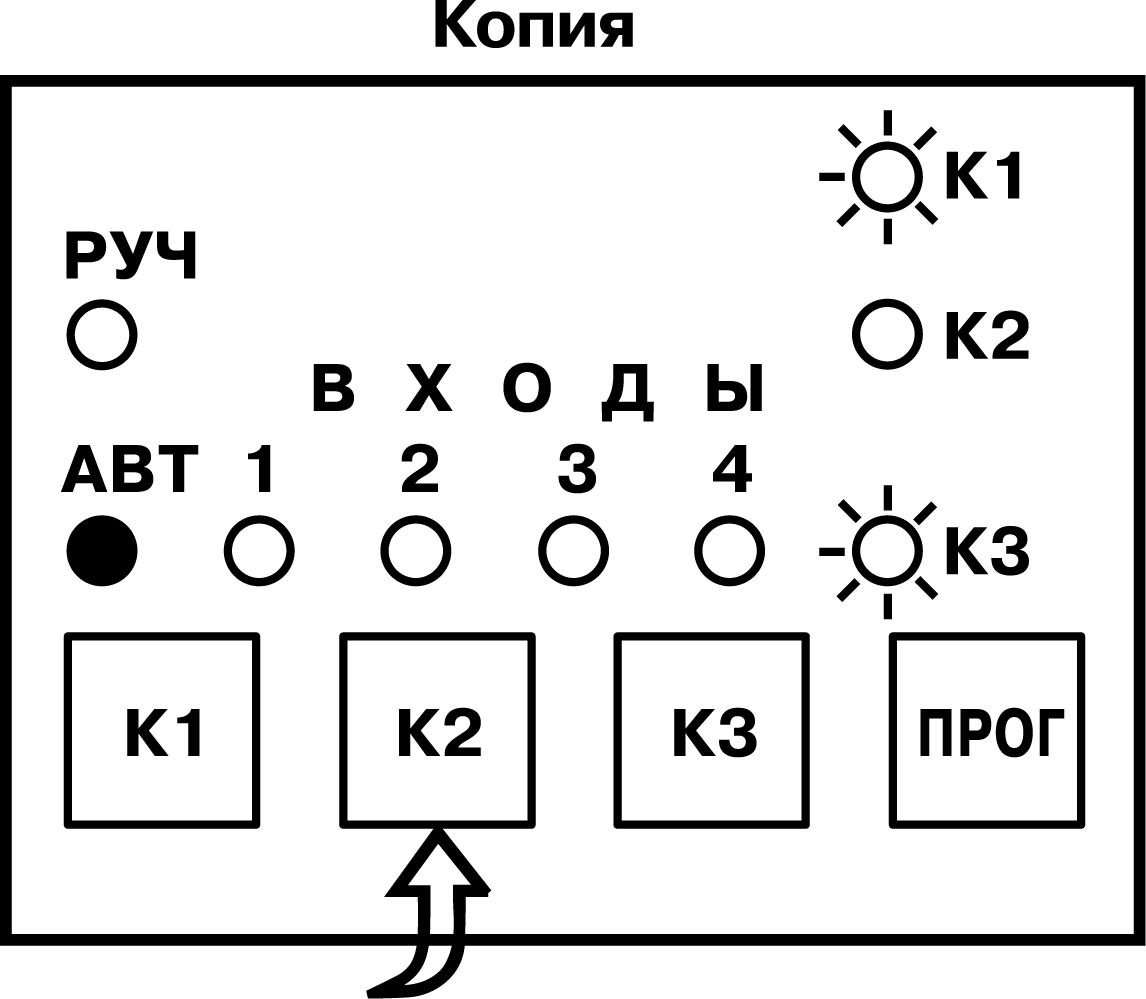
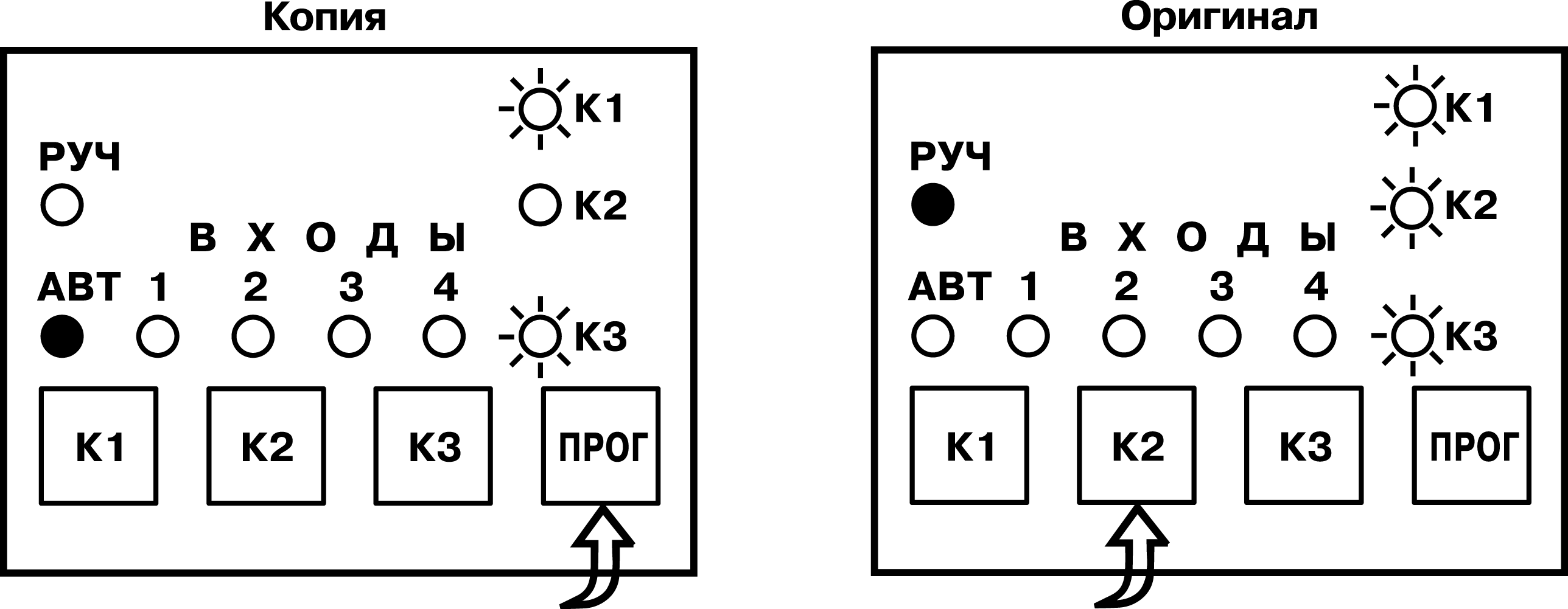
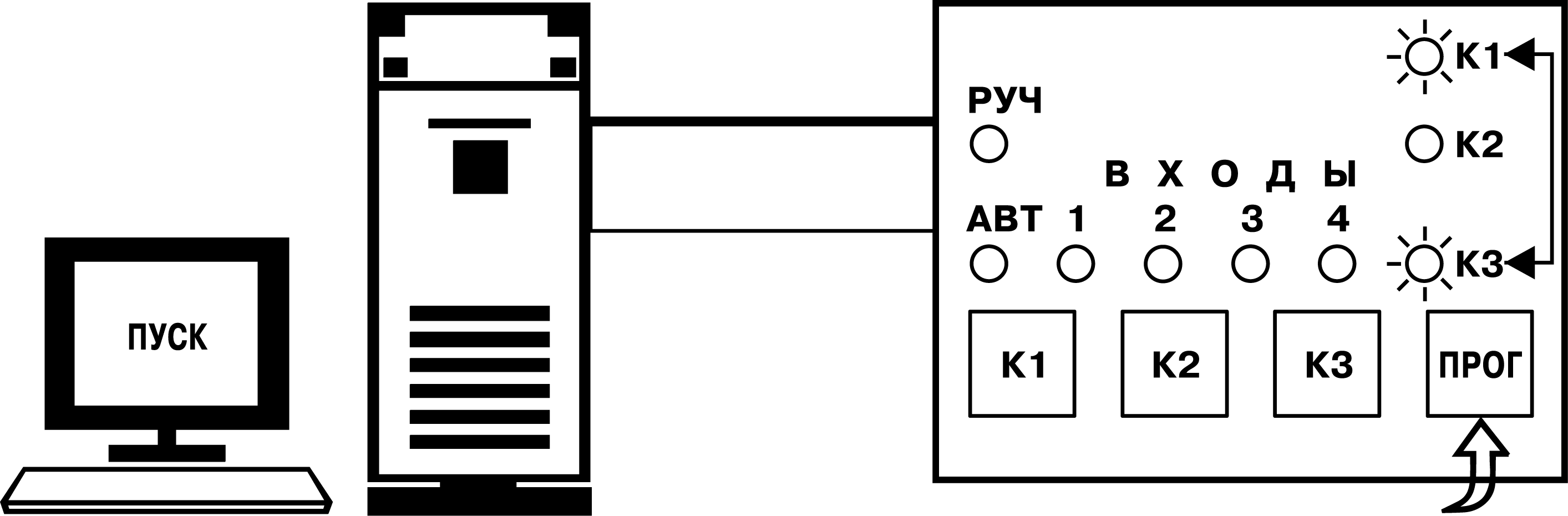
На передающем приборе нажать кнопку
, чтобы перевести прибор в режим
начала передачи. В течение четырех секунд на передающем приборе будут
непрерывно гореть светодиоды К1, К2 и К3 после
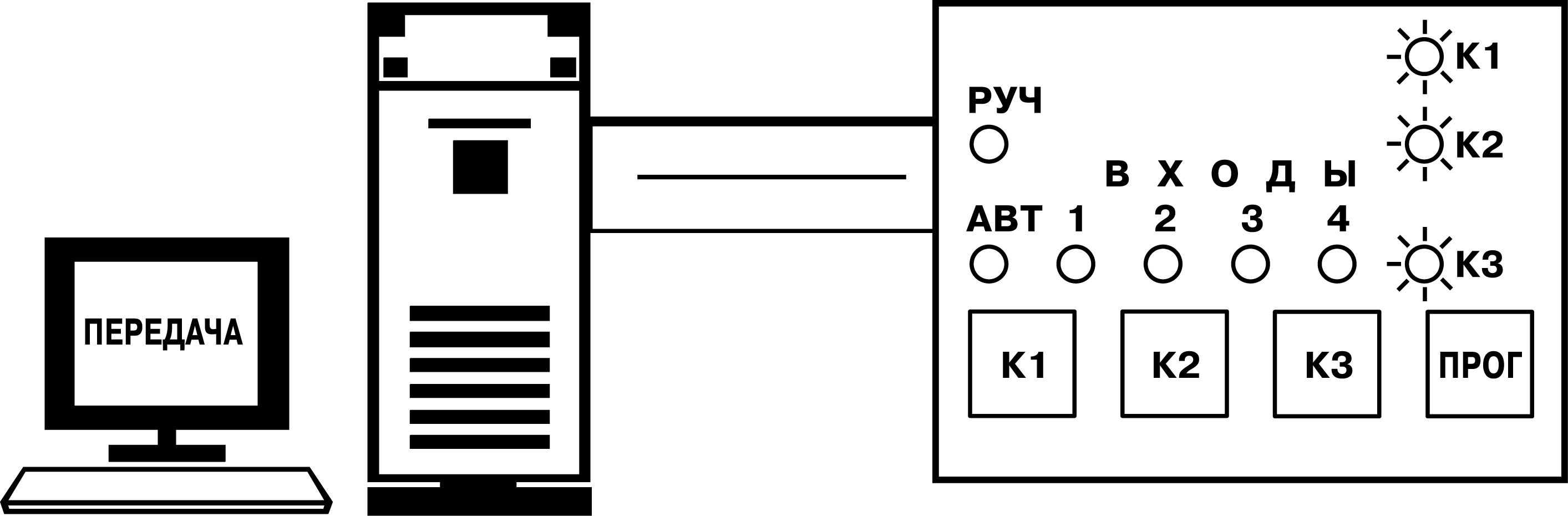
чего начнется передача, сопровождаемая одновременным миганием светодиодов К1, К2 и К3 (см. рисунок ниже).Индикация
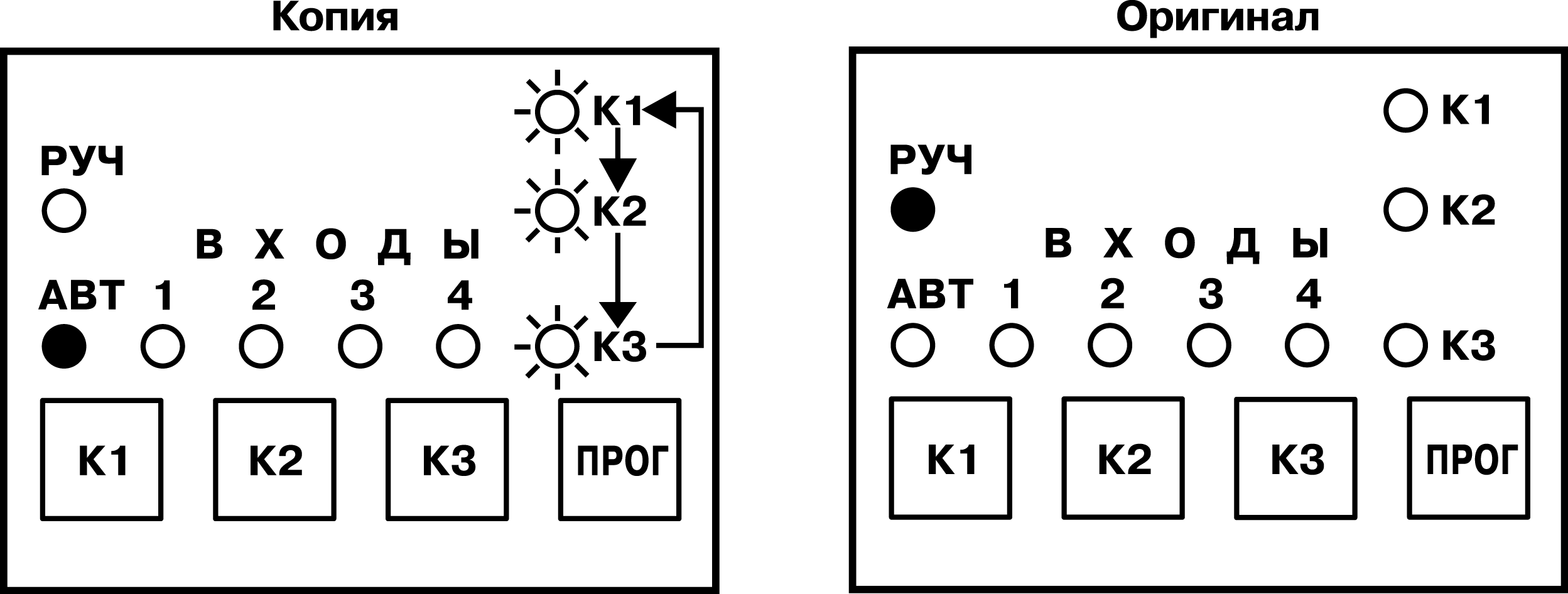
при передаче алгоритмаПосле передачи каждого блока данных синхронно
мигают светодиоды К1, К2 и К3 на обоих приборах
(см. рисунок ниже).Индикация при передаче алгоритма -
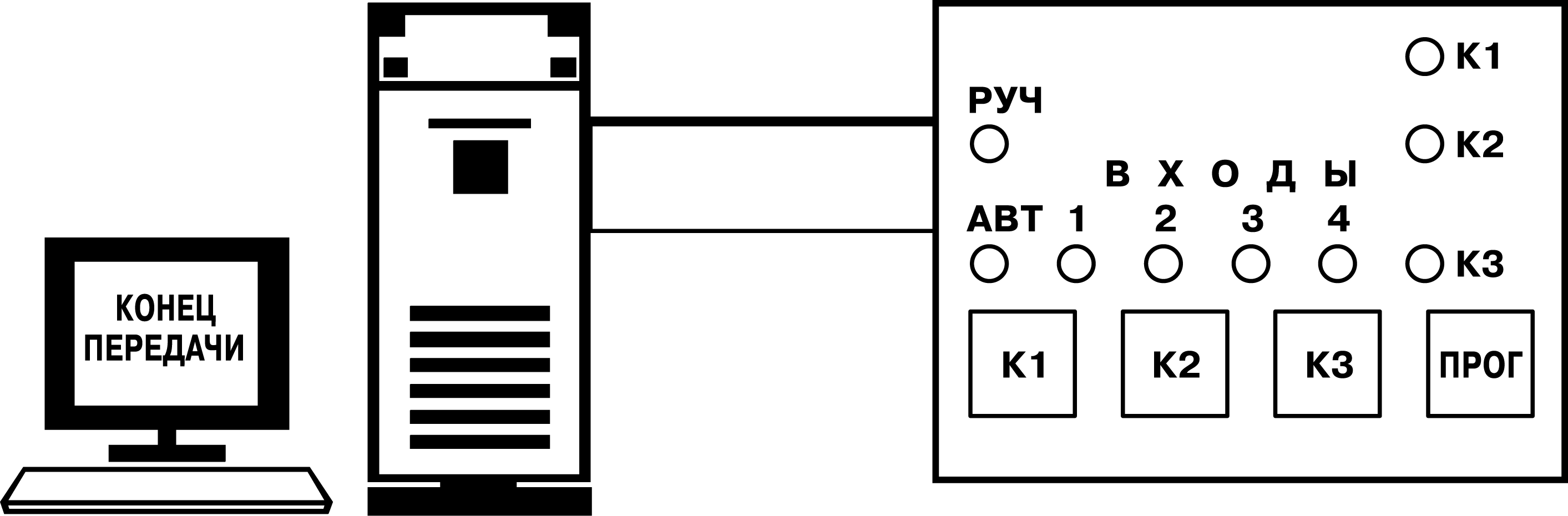
После успешного окончания передачи прекратится мигание светодиодов К1, К2, К3 (см. рисунок ниже).
Индикация
при передаче алгоритма -
Если после окончания передачи светодиоды К1, К2 и К3 принимающего прибора мигают по очереди (см. рисунки
ниже), операцию записи алгоритма необходимо повторить.Индикация при ошибке передачи

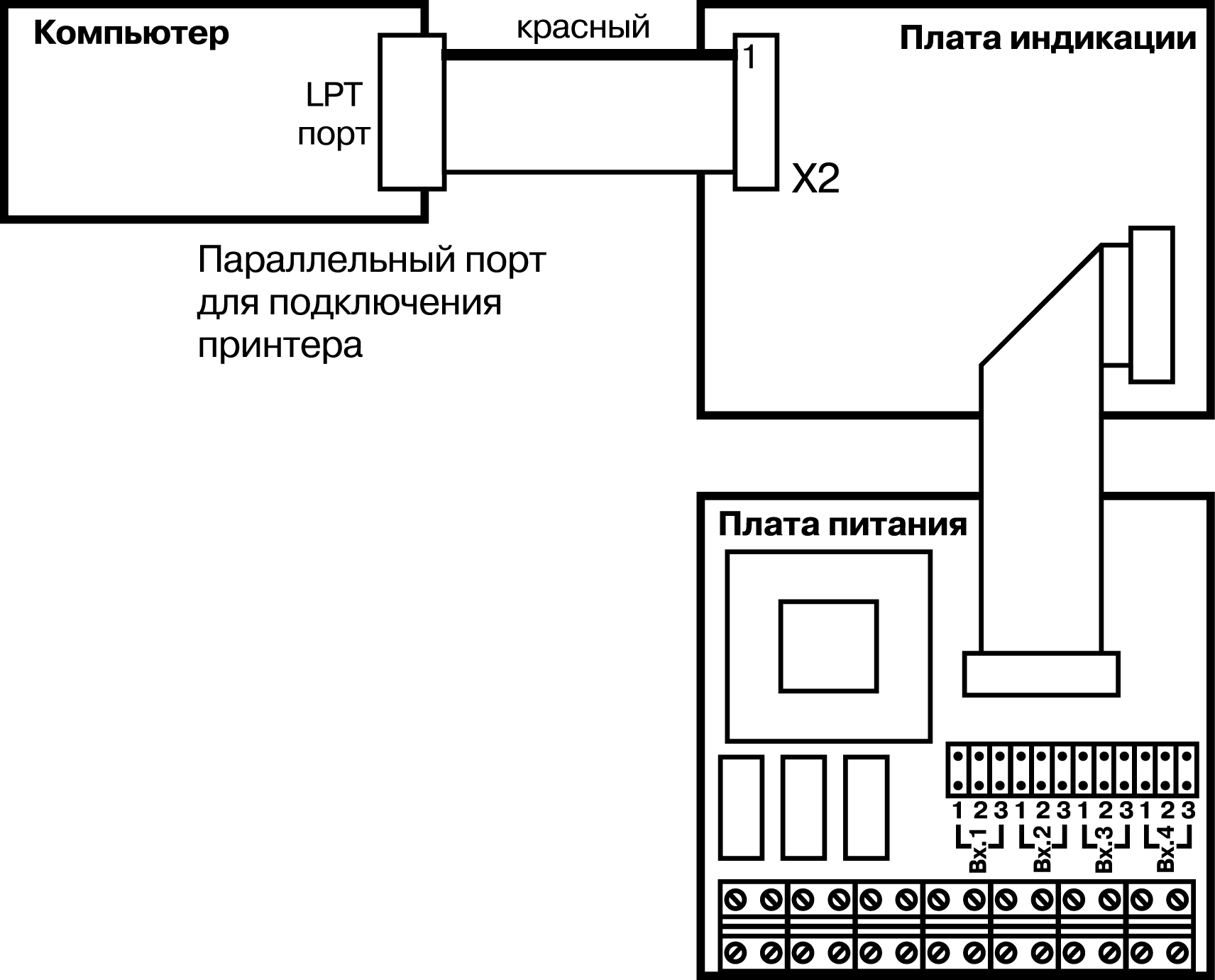
Копирование алгоритма с компьютера в прибор
Для копирования алгоритма из компьютера в прибор следует:
-
Соединить параллельный порт компьютера с прибором специальным
кабелем № 2, как показано на рисунок ниже.Подключение
при копировании в ПКВниманиеСоединение производить только с обесточенным
прибором и компьютером. -
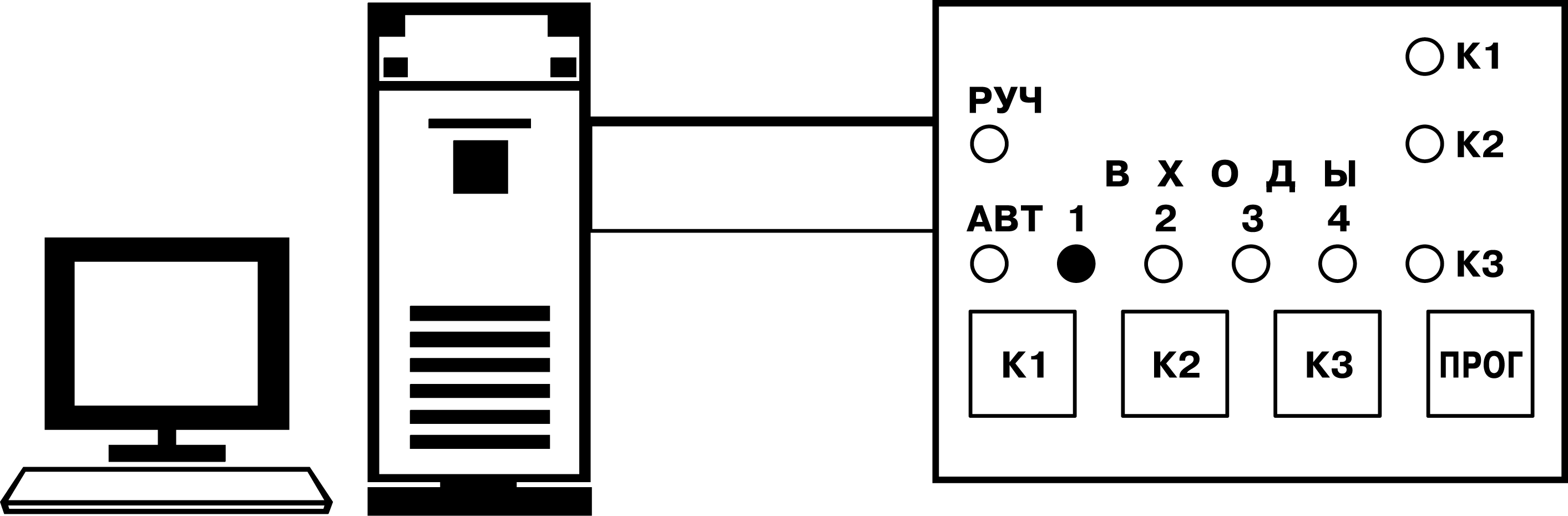
Подать питание на прибор и включить компьютер (рисунок ниже).
Индикация при копировании в ПК На четырех красных
светодиодах 1, 2, 3, 4 САУ-МП в течение 2 с индицируется номер режима,
после чего прибор переходит в режим приема алгоритма, о чем свидетельствует
светящийся светодиод АВТ (см. рисунок ниже).Индикация
при копировании в ПК -
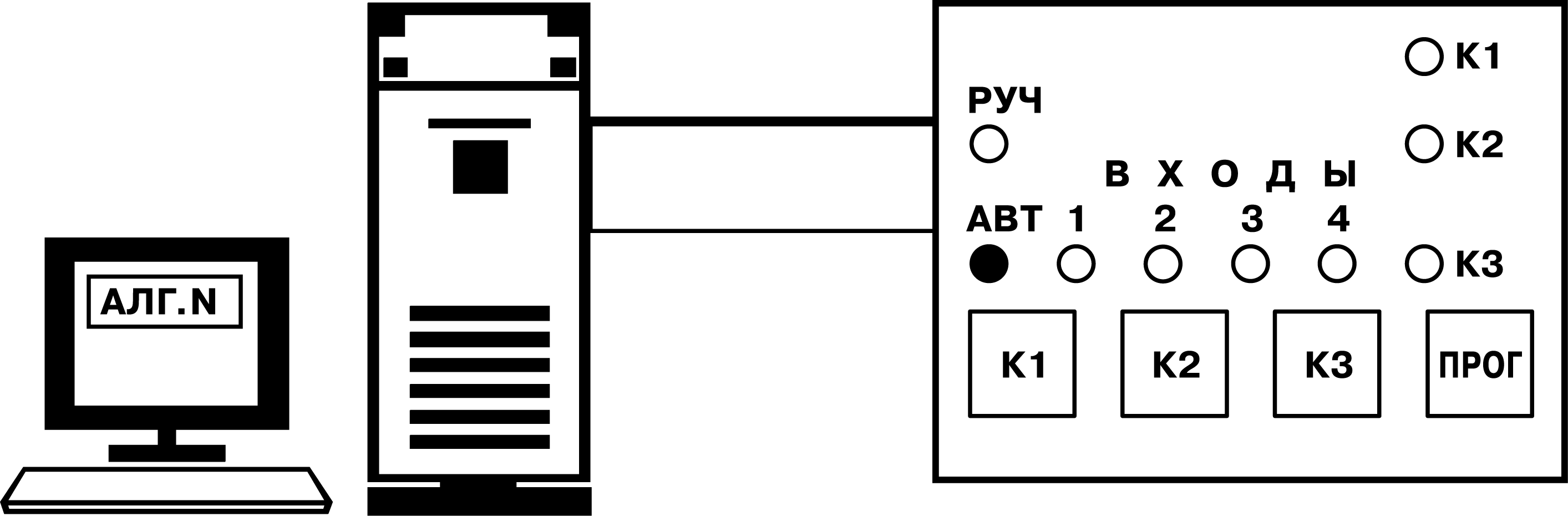
Запустить на компьютере программу загрузки алгоритмов для САУ-МП.
С помощью инструкции к программе выбрать из меню нужный алгоритм (см.
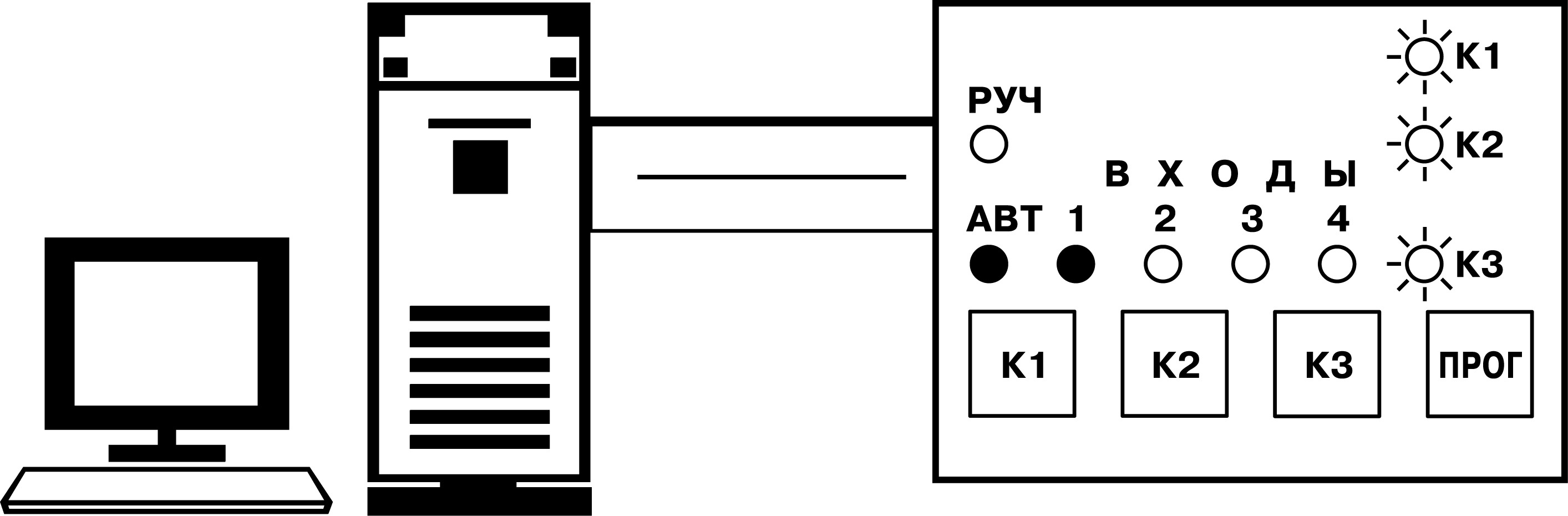
рисунок ниже).Индикация при копировании в ПК -
На принимающем приборе нажмите кнопку К2, чтобы перевести его
в режим ожидания приема, который индицируется поочередным миганием
светодиодов К1 и К3 (рисунок ниже).Индикация при копировании
в ПК -
Нажать кнопку Прог (см. рисунок ниже). После чего следует дать
компьютеру команду передачи данных.Индикация при копировании
в ПКПо мере поступления очередного блока данных синхронно
мигают светодиоды К1, К2 и К3 (см. рисунок ниже).Индикация
при копировании в ПК -
После успешного окончания передачи прекратится мигание светодиодов
К1, К2 и К3 (см. рисунок ниже).Индикация при копировании
в ПК -
Если после окончания передачи светодиоды К1, К2 и К3 принимающего
прибора мигают по очереди (см. рисунок ниже), операцию записи алгоритма
необходимо повторить.Индикация при ошибке копирования
в ПКВ случае успешного окончания процесса снимите питание с прибора и
отсоедините кабель от разъема Х2.
Изменение уставок таймеров
Для изменения уставок таймеров следует:
-
Установить на коммутационном поле Х2 платы индикации перемычки
в положение 2 и 8Установка перемычек - Подать питание на прибор. На четырех красных светодиодах 1, 2,
3, 4 в течение 2 с индицируется номер режима, после чего на индикаторах
прибора отобразится текущее значение уставки Т0. -
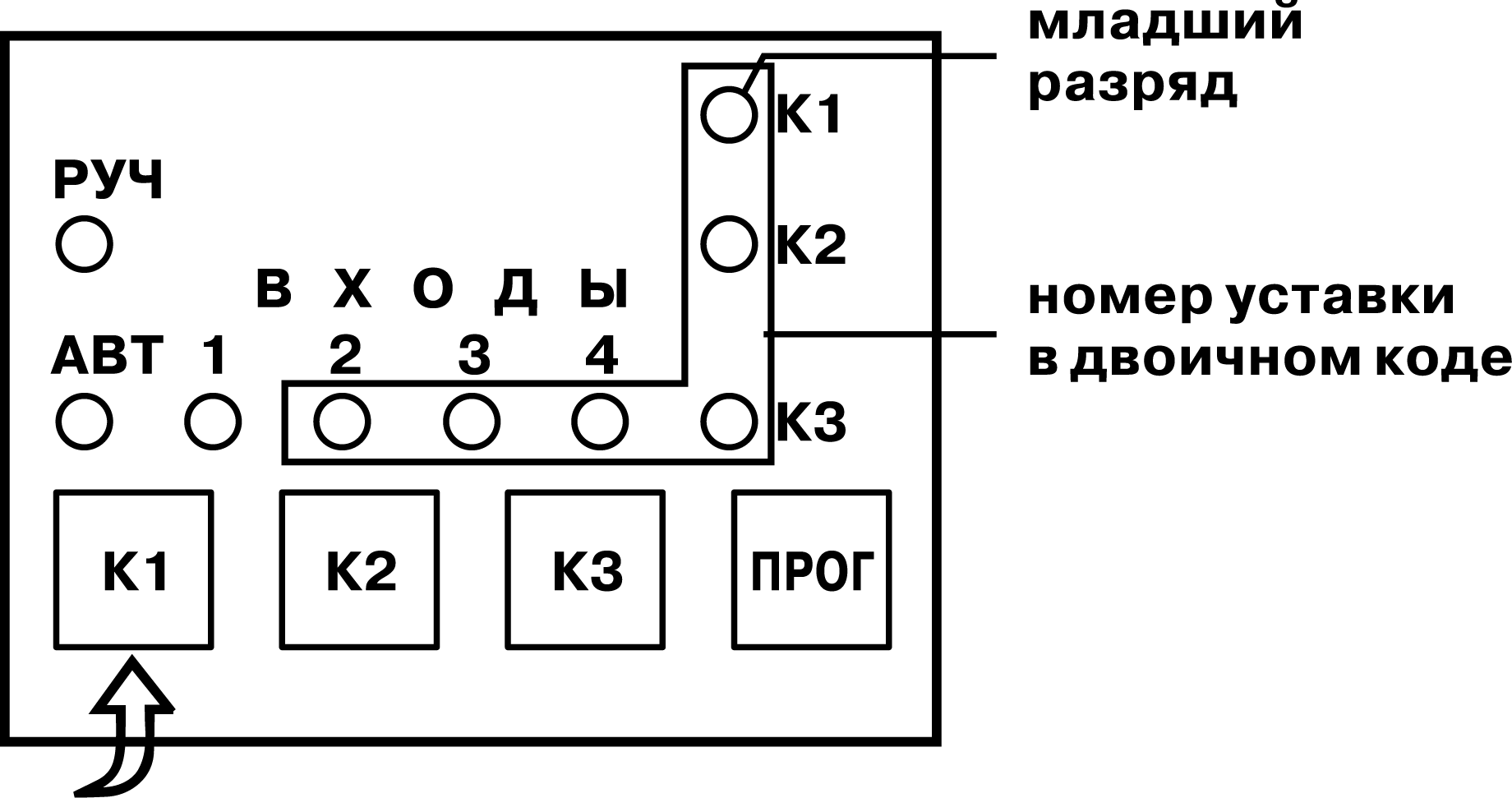
Для выбора уставки нажать и удерживать кнопку K1. На светодиодах
отобразится номер уставки в двоичном коде. Во время удержания кнопки
K1 отображаемый код начнет увеличиваться от 0 до 36. Если одновременно
с кнопкой K1 нажать кнопку K2, то значение кода начнет уменьшаться.Индикация при настройке таймеров В Приложении А приводится таблица перевода десятичного
кода в двоичный. -
Отпустить кнопку в тот момент, когда на индикаторах будет высвечен
номер нужной уставки. После того, как кнопка K1 будет отпущена, на
индикаторах появится текущее значение уставки в формате, показанном
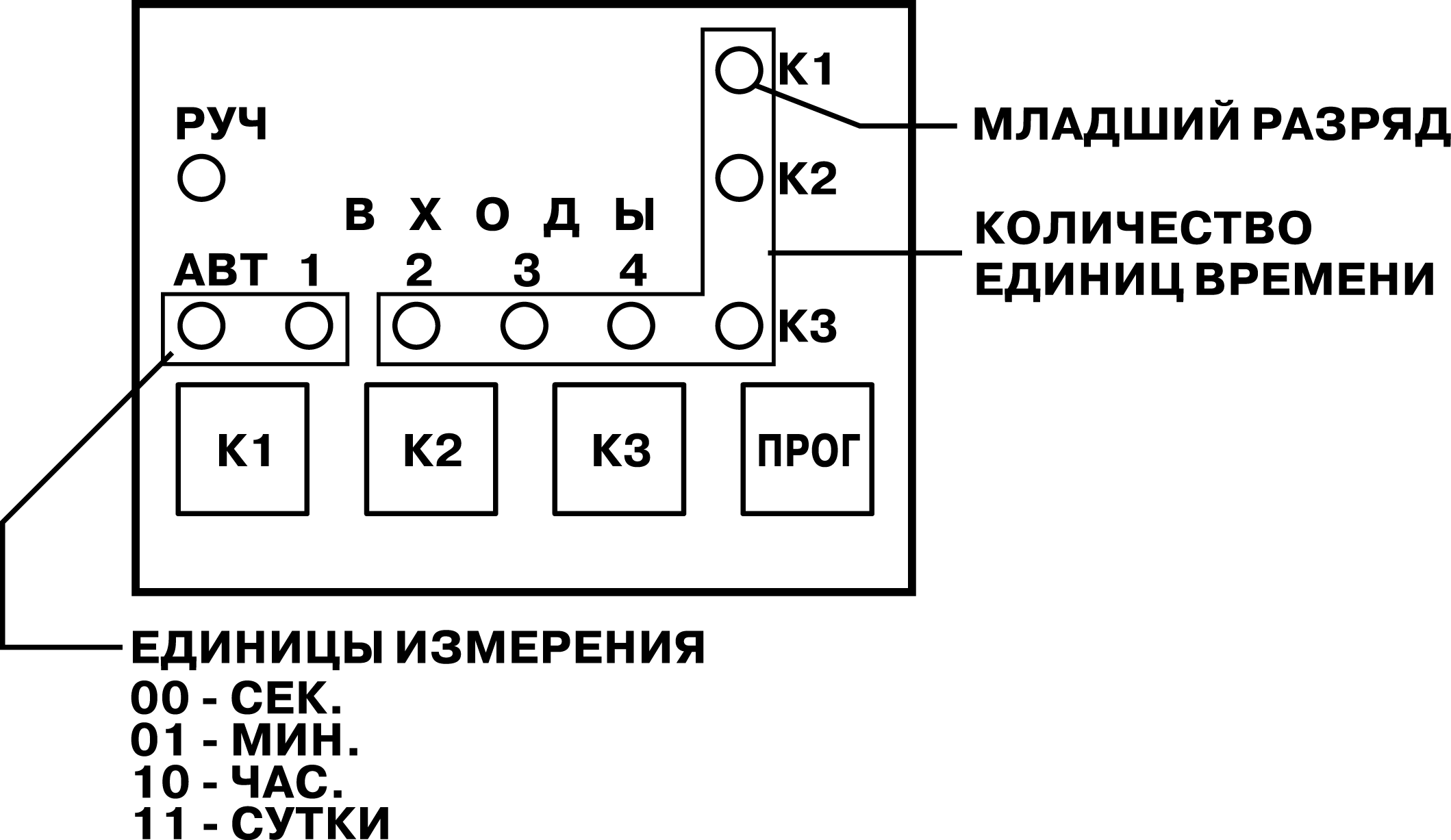
на рисунке ниже.Индикация при настройке таймеров В двух
старших разрядах кодируется единица измерения времени: секунда, минута,
час или сутки. В младших шести – количество этих единиц. - Для выбора единицы измерения времени нажать и удерживать кнопку
ПРОГ – значение старшего разряда начнет изменяться. Кнопку ПРОГ следует
отпустить в тот момент, когда разряд будет в нужном состоянии. -
Для установки следующего разряда вновь нажать и удерживать
кнопку ПРОГ.Индикация при настройке таймеров - Аналогично устанавливаются по очереди все разряды выбранной уставки.
- Для выбора следующей уставки следует нажать и удерживать кнопку
К1. - После окончания установки обесточить прибор и удалить все перемычки
с коммутационного поля Х2.
Изменение опорных напряжений входных компараторов
Для изменения опорных напряжений входных компараторов следует:
-
Установить на коммутационном поле Х2 платы индикации перемычки
в положение 3 и 8.Коммутационное
поле - Подать питание на прибор. На четырех красных светодиодах 1, 2,
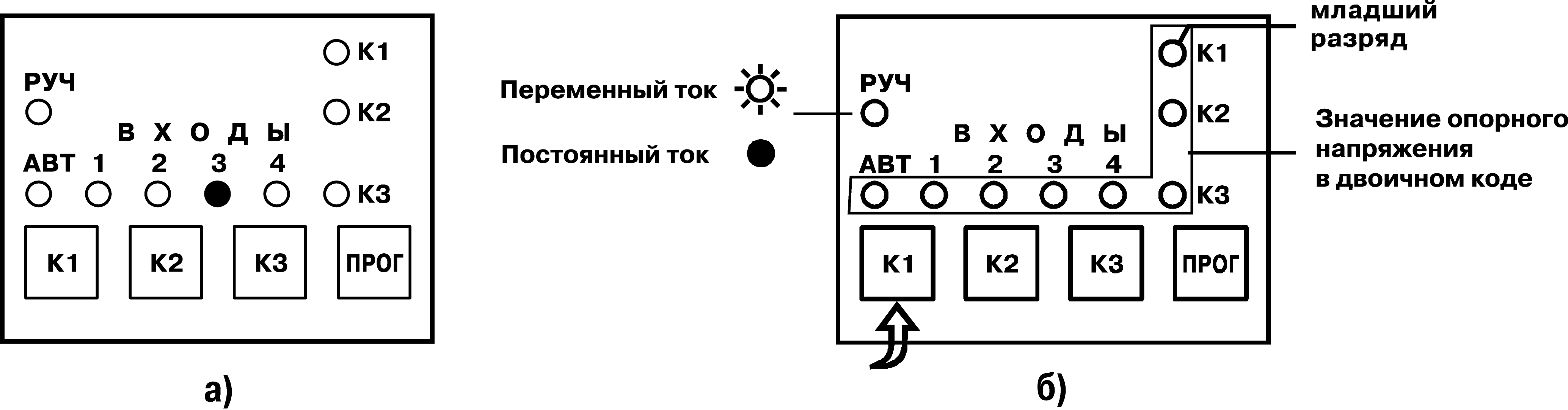
3, 4 в течение 2 с индицируется номер режима (рисунок, а, б), после чего на индикаторах отобразится текущее значение опорного
напряжения первого входного устройства и род тока, обрабатываемого
данным входом. - Если светодиод РУЧ мигает, то ток переменный, если горит
непрерывно, то постоянный (рисунок, б). Остальные восемь светодиодов
в двоичном коде от 0 до 255 (К1 – младший разряд) отображают в условных
единицах значение напряжения, при котором срабатывает входное устройство.Изменение опорного
напряженияДля выбора входного устройства следует нажать и удерживать кнопку
К1. Светодиоды Входы 1, 2, 3, 4 начнут поочередно светиться.
Отпустить кнопку в тот момент, когда включится светодиод, соответствующий
выбранному входу – на индикаторах отобразится текущее значение опорного
напряжения. -
Для изменения значения опорного напряжения нажать и удерживать
кнопку ПРОГ – значение старшего разряда начнет изменяться. Отпустить
кнопку ПРОГ в тот момент, когда разряд будет в нужном состоянии. -
Для установки следующего разряда вновь нажать и удерживать
кнопку ПРОГ.Аналогично установить по очереди всех разряды.
-
Для выбора следующего входного устройства нажать и удерживать
кнопку К1.После окончания установки обесточить прибор и удалить
все перемычки с коммутационного поля Х2.
Задержки и пороги можно изменять с помощью компьютерной программы
загрузки алгоритма.
Техническое обслуживание
Общие указания
Во время выполнения работ по техническому обслуживанию прибора
следует соблюдать требования безопасности, изложенные в разделе. Техническое обслуживание прибора
проводится не реже одного раза в 6 месяцев и включает следующие процедуры:
-
проверка крепления прибора;
-
проверка винтовых соединений;
-
удаление пыли и грязи с клеммника прибора.
Следует регулярно осматривать кондуктометрические зонды, используемые
в качестве датчиков уровня, и в случае необходимости чистить рабочие
части их электродов от налета, оказывающего изолирующее действие.
Периодичность осмотра зависит от состава рабочей жидкости и содержания
в ней нерастворимых примесей.
Маркировка
На корпус прибора нанесены:
- наименование прибора;
- степень защиты корпуса по ГОСТ 14254;
- напряжение и частота питания;
- потребляемая мощность;
- класс защиты от поражения электрическим током по ГОСТ 12.2.007.0;
- знак соответствия требованиям ТР ТС (ЕАС);
- страна-изготовитель;
- заводской номер прибора и год выпуска.
На потребительскую тару нанесены:
- наименование прибора;
- знак соответствия требованиям ТР ТС (ЕАС);
- страна-изготовитель;
- заводской номер прибора и год выпуска.
Упаковка
Упаковка прибора производится в соответствии
с ГОСТ 23088-80 в потребительскую тару, выполненную из коробочного
картона по ГОСТ 7933-89.
Упаковка прибора при пересылке почтой
производится по ГОСТ 9181-74.
Комплектность
| Наименование | Количество |
|---|---|
| Прибор | 1 шт. |
| Паспорт и Гарантийный талон | 1 экз. |
| Руководство по эксплуатации | 1 экз. |
| Комплект крепежных элементов | 1 к-т. |
|
Кабель САУ-МП П-П (поставляется по |
1 шт. |
|
Кабель САУ-МП ПК-П (поставляется по |
1 шт. |
Предупреждение
Изготовитель оставляет за собой право внесения
дополнений в комплектность прибора.
Транспортирование и хранение
Прибор должен транспортироваться в закрытом транспорте любого вида.
В транспортных средствах тара должна крепиться согласно правилам,
действующим на соответствующих видах транспорта.
Условия транспортирования должны соответствовать
условиям 5 по ГОСТ 15150-69 при температуре окружающего воздуха от
минус 25 до плюс 55 °С с соблюдением мер защиты от ударов и вибраций.
Прибор следует перевозить в транспортной таре поштучно или в контейнерах.
Условия хранения в таре на складе изготовителя
и потребителя должны соответствовать условиям 1 по ГОСТ 15150-69. В воздухе не должны присутствовать агрессивные примеси.
Прибор следует хранить на стеллажах.
Гарантийные обязательства
Изготовитель гарантирует соответствие прибора требованиям ТУ при
соблюдении условий эксплуатации, транспортирования, хранения и монтажа.
Гарантийный срок эксплуатации – 24 месяца со дня продажи.
В случае выхода прибора из строя в течение гарантийного срока при
соблюдении условий эксплуатации, транспортирования, хранения и монтажа
предприятие-изготовитель обязуется осуществить его бесплатный ремонт
или замену.
Порядок передачи прибора в ремонт содержится в паспорте и в гарантийном
талоне.
Таблица перевода десятичного кода в двоичный
|
0 |
00000000 |
64 |
01000000 |
128 |
10000000 |
192 |
11000000 |
|||
|
1 |
00000001 |
65 |
01000001 |
129 |
10000001 |
193 |
11000001 |
|||
|
2 |
00000010 |
66 |
01000010 |
130 |
10000010 |
194 |
11000010 |
|||
|
3 |
00000011 |
67 |
01000011 |
131 |
10000011 |
195 |
11000011 |
|||
|
4 |
00000100 |
68 |
01000100 |
132 |
10000100 |
196 |
11000100 |
|||
|
5 |
00000101 |
69 |
01000101 |
133 |
10000101 |
197 |
11000101 |
|||
|
6 |
00000110 |
70 |
01000110 |
134 |
10000110 |
198 |
11000110 |
|||
|
7 |
00000111 |
71 |
01000111 |
135 |
10000111 |
199 |
11000111 |
|||
|
8 |
00001000 |
72 |
01001000 |
136 |
10001000 |
200 |
11001000 |
|||
|
9 |
00001001 |
73 |
01001001 |
137 |
10001001 |
201 |
11001001 |
|||
|
10 |
00001010 |
74 |
01001010 |
138 |
10001010 |
202 |
11001010 |
|||
|
11 |
00001011 |
75 |
01001011 |
139 |
10001011 |
203 |
11001011 |
|||
|
12 |
00001100 |
76 |
01001100 |
140 |
10001100 |
204 |
11001100 |
|||
|
13 |
00001101 |
77 |
01001101 |
141 |
10001101 |
205 |
11001101 |
|||
|
14 |
00001110 |
78 |
01001110 |
142 |
10001110 |
206 |
11001110 |
|||
|
15 |
00001111 |
79 |
01001111 |
143 |
10001111 |
207 |
11001111 |
|||
|
16 |
00010000 |
80 |
01010000 |
144 |
10010000 |
208 |
11010000 |
|||
|
17 |
00010001 |
81 |
01010001 |
145 |
10010001 |
209 |
11010001 |
|||
|
18 |
00010010 |
82 |
01010010 |
146 |
10010010 |
210 |
11010010 |
|||
|
19 |
00010011 |
83 |
01010011 |
147 |
10010011 |
211 |
11010011 |
|||
|
20 |
00010100 |
84 |
01010100 |
148 |
10010100 |
212 |
11010100 |
|||
|
21 |
00010101 |
85 |
01010101 |
149 |
10010101 |
213 |
11010101 |
|||
|
22 |
00010110 |
86 |
01010110 |
150 |
10010110 |
214 |
11010110 |
|||
|
23 |
00010111 |
87 |
01010111 |
151 |
10010111 |
215 |
11010111 |
|||
|
24 |
00011000 |
88 |
01011000 |
152 |
10011000 |
216 |
11011000 |
|||
|
25 |
00011001 |
89 |
01011001 |
153 |
10011001 |
217 |
11011001 |
|||
|
26 |
00011010 |
90 |
01011010 |
154 |
10011010 |
218 |
11011010 |
|||
|
27 |
00011011 |
91 |
01011011 |
155 |
10011011 |
219 |
11011011 |
|||
|
28 |
00011100 |
92 |
01011100 |
156 |
10011100 |
220 |
11011100 |
|||
|
29 |
00011101 |
93 |
01011101 |
157 |
10011101 |
221 |
11011101 |
|||
|
30 |
00011110 |
94 |
01011110 |
158 |
10011110 |
222 |
11011110 |
|||
|
31 |
00011111 |
95 |
01011111 |
159 |
10011111 |
223 |
11011111 |
|||
|
32 |
00100000 |
96 |
01100000 |
160 |
10100000 |
224 |
11100000 |
|||
|
33 |
00100001 |
97 |
01100001 |
161 |
10100001 |
225 |
11100001 |
|||
|
34 |
00100010 |
98 |
01100010 |
162 |
10100010 |
226 |
11100010 |
|||
|
35 |
00100011 |
99 |
01100011 |
163 |
10100011 |
227 |
11100011 |
|||
|
36 |
00100100 |
100 |
01100100 |
164 |
10100100 |
228 |
11100100 |
|||
|
37 |
00100101 |
101 |
01100101 |
165 |
10100101 |
229 |
11100101 |
|||
|
38 |
00100110 |
102 |
01100110 |
166 |
10100110 |
230 |
11100110 |
|||
|
39 |
00100111 |
103 |
01100111 |
167 |
10100111 |
231 |
11100111 |
|||
|
40 |
00101000 |
104 |
01101000 |
168 |
10101000 |
232 |
11101000 |
|||
|
41 |
00101001 |
105 |
01101001 |
169 |
10101001 |
233 |
11101001 |
|||
|
42 |
00101010 |
106 |
01101010 |
170 |
10101010 |
234 |
11101010 |
|||
|
43 |
00101011 |
107 |
01101011 |
171 |
10101011 |
235 |
11101011 |
|||
|
44 |
00101100 |
108 |
01101100 |
172 |
10101100 |
236 |
11101100 |
|||
|
45 |
00101101 |
109 |
01101101 |
173 |
10101101 |
237 |
11101101 |
|||
|
46 |
00101110 |
110 |
01101110 |
174 |
10101110 |
238 |
11101110 |
|||
|
47 |
00101111 |
111 |
01101111 |
175 |
10101111 |
239 |
11101111 |
|||
|
48 |
00110000 |
112 |
01110000 |
176 |
10110000 |
240 |
11110000 |
|||
|
49 |
00110001 |
113 |
01110001 |
177 |
10110001 |
241 |
11110001 |
|||
|
50 |
00110010 |
114 |
01110010 |
178 |
10110010 |
242 |
11110010 |
|||
|
51 |
00110011 |
115 |
01110011 |
179 |
10110011 |
243 |
11110011 |
|||
|
52 |
00110100 |
116 |
01110100 |
180 |
10110100 |
244 |
11110100 |
|||
|
53 |
00110101 |
117 |
01110101 |
181 |
10110101 |
245 |
11110101 |
|||
|
54 |
00110110 |
118 |
01110110 |
182 |
10110110 |
246 |
11110110 |
|||
|
55 |
00110111 |
119 |
01110111 |
183 |
10110111 |
247 |
11110111 |
|||
|
56 |
00111000 |
120 |
01111000 |
184 |
10111000 |
248 |
11111000 |
|||
|
57 |
00111001 |
121 |
01111001 |
185 |
10111001 |
249 |
11111001 |
|||
|
58 |
00111010 |
122 |
01111010 |
186 |
10111010 |
250 |
11111010 |
|||
|
59 |
00111011 |
123 |
01111011 |
187 |
10111011 |
251 |
11111011 |
|||
|
60 |
00111100 |
124 |
01111100 |
188 |
10111100 |
252 |
11111100 |
|||
|
61 |
00111101 |
125 |
01111101 |
189 |
10111101 |
253 |
11111101 |
|||
|
62 |
00111110 |
126 |
01111110 |
190 |
10111110 |
254 |
11111110 |
|||
|
63 |
00111111 |
127 |
01111111 |
191 |
10111111 |
255 |
11111111 |
Предупреждающие сообщения
В данном руководстве применяются следующие предупреждения:
Опасность
Ключевое слово ОПАСНОСТЬ сообщает о непосредственной
угрозе опасной ситуации, которая приведет к смерти или серьезной
травме, если ее не предотвратить.
Внимание
Ключевое слово ВНИМАНИЕ сообщает о потенциально
опасной ситуации, которая может привести к небольшим травмам.
Предупреждение
Ключевое слово ПРЕДУПРЕЖДЕНИЕ сообщает о потенциально
опасной ситуации, которая может привести к повреждению имущества.
Примечание
Ключевое слово ПРИМЕЧАНИЕ обращает внимание на полезные
советы и рекомендации, а также информацию для эффективной и безаварийной
работы оборудования.
| Ограничение ответственности |
|
Ни при |
Работа с устройством
Устройство ОВЕН САУ – МП может
работать в ручном (включен
светодиод «РУЧ» и мигает «АВТ») и
автоматическом (включен светодиод
«АВТ» и мигает «РУЧ») режимах управления
реле.
Если с платы индикации устройства
удалены все перемычки, то после подачи
питания 220 В 50 Гц оно переходит в режим
отсчета задержки начала выполнения
алгоритма, заданной в уставке Т0 = 16 с.
Этот режим индицируется синхронно
мигающими светодиодами «РУЧ» и «АВТ».
После окончания отсчета задержки или
кратковременного нажатия на кнопку
«ПРОГ» устройство переходит к выполнению
заданного алгоритма (автоматический
режим). При этом светодиод «АВТ» горит
непрерывно, а светодиод «РУЧ» мигает с
частотой 1 Гц.
Перевод устройства в режим ручного
управления осуществляется нажатием и
удержанием в течение 3 с кнопки «ПРОГ».
После перехода в этот режим светодиод
«РУЧ» горит непрерывно, а «АВТ» мигает
с частотой 1 Гц.
При работе в режиме ручного управления
возможно включение выходных реле прибора
при нажатии на одноименную кнопку «К1»,
«К2», «К3», или независимо от состояния
датчиков. Реакция на кнопку происходит
после ее отпускания. Длительность
нажатия должна быть не менее 2-х с.
Перевод прибора в режим автоматического
управления производится повторным
нажатием кнопки «ПРОГ».
Контроль за состоянием входов
осуществляется по светодиодам «ВХОДЫ
1, 2, 3, 4», а за состоянием выходов по
светодиодам «К1», «К2» и «К3».
При выполнении работ по техническому
обслуживанию следует соблюдать меры
безопасности. Периодически, но не реже
одного раза в 6 месяцев производить
осмотр устройства. При осмотре
контролировать:
– качество крепления устройства;
– отсутствие на приборе и клеммнике
пыли, грязи, а также посторонних предметов;
– качество подключения внешних связей.
Обнаруженные при осмотре недостатки
устранять.
При использовании в качестве датчиков
уровня кондуктометрических зондов
осуществлять их регулярный осмотр и
очистку рабочих частей электродов от
изолирующих налетов, шлаков и т.п.
Периодичность осмотра зависит от состава
рабочей жидкости и количества в ней
нерастворимых примесей. При работе с
активными датчиками периодически, но
не реже одного раза в 6 месяцев производить
их осмотр, проверку качества крепления,
а также очистку рабочих поверхностей
от пыли и грязи.
Схема подключения устройства ОВЕН
САУ – МП для настенного крепления
приведена на рис. 5.13.
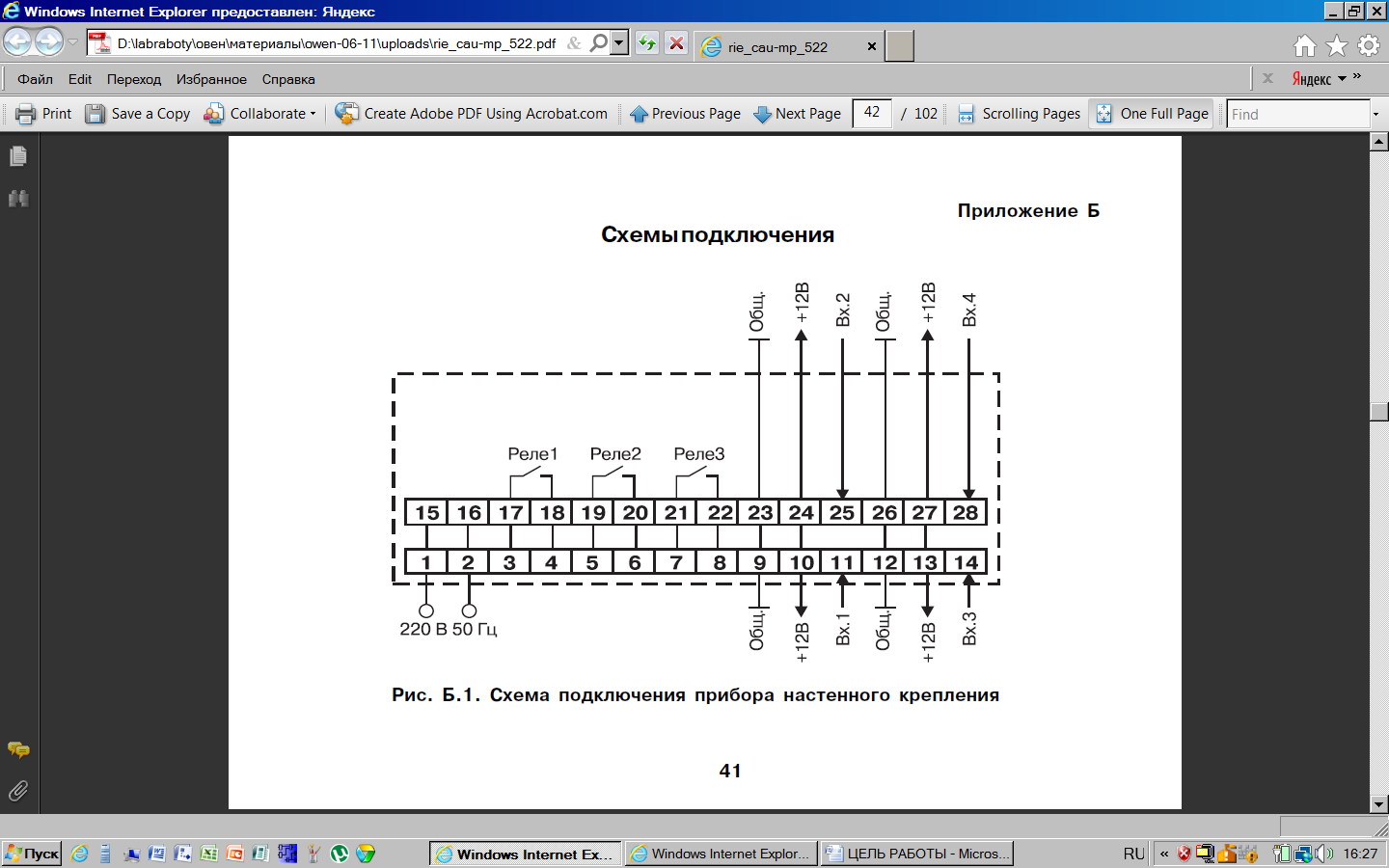
Рис. 5.13. Схема подключения устройства
ОВЕН САУ – МП
Методика записи и копирования алгоритмов, изменения опорных напряжений входных компараторов и уставок таймеров
После включения устройства в одном из
режимов программирования (режимы с 1 по
3) на четырех красных светодиодах «1»,
«2», «3», «4» в течение 2 с индицируется
номер режима. Затем устройство начинает
работу в соответствующем режиме.
Режим 1. Копирование алгоритма из одного устройства в другое
Отсоединить плату индикации программируемого
устройства от платы питания. Соединить
платы специальным кабелем № 1.
Внимание! Соединение производить
только при выключенном питании устройств.
Подать питание на «образцовое» устройство.
На 1 с загорится светодиод «1» , индицируя
номер режима, после чего оба устройства
готовы к приему алгоритма, о чем
свидетельствует горящий светодиод
«АВТ» (рис. 5.14).
Кнопкой «К1»переведите «образцовое»
устройство в режим передачи. При этом
на нем загорится светодиод «РУЧ» (рис.
5.15).
На принимающем устройстве нажать кнопку
«К2» (рис. 5.16), чтобы перевести устройство
в режим ожидания приема. Режим индицируется
поочередным миганием светодиодов «»К1»
и «К3». Затем нажмите кнопку «ПРОГ».
После этого загорится светодиод «К3».
На передающем устройстве нажмите кнопку
«К2», чтобы перевести устройство в режим
начала передачи. В течение 4-х с на
передающем устройстве будут непрерывно
гореть светодиоды «К1», «К2» и «К3» после
чего начнется передача, сопровождаемая
одновременным миганием светодиодов
«К1», «К2» и «К3» (рис. 5.17).
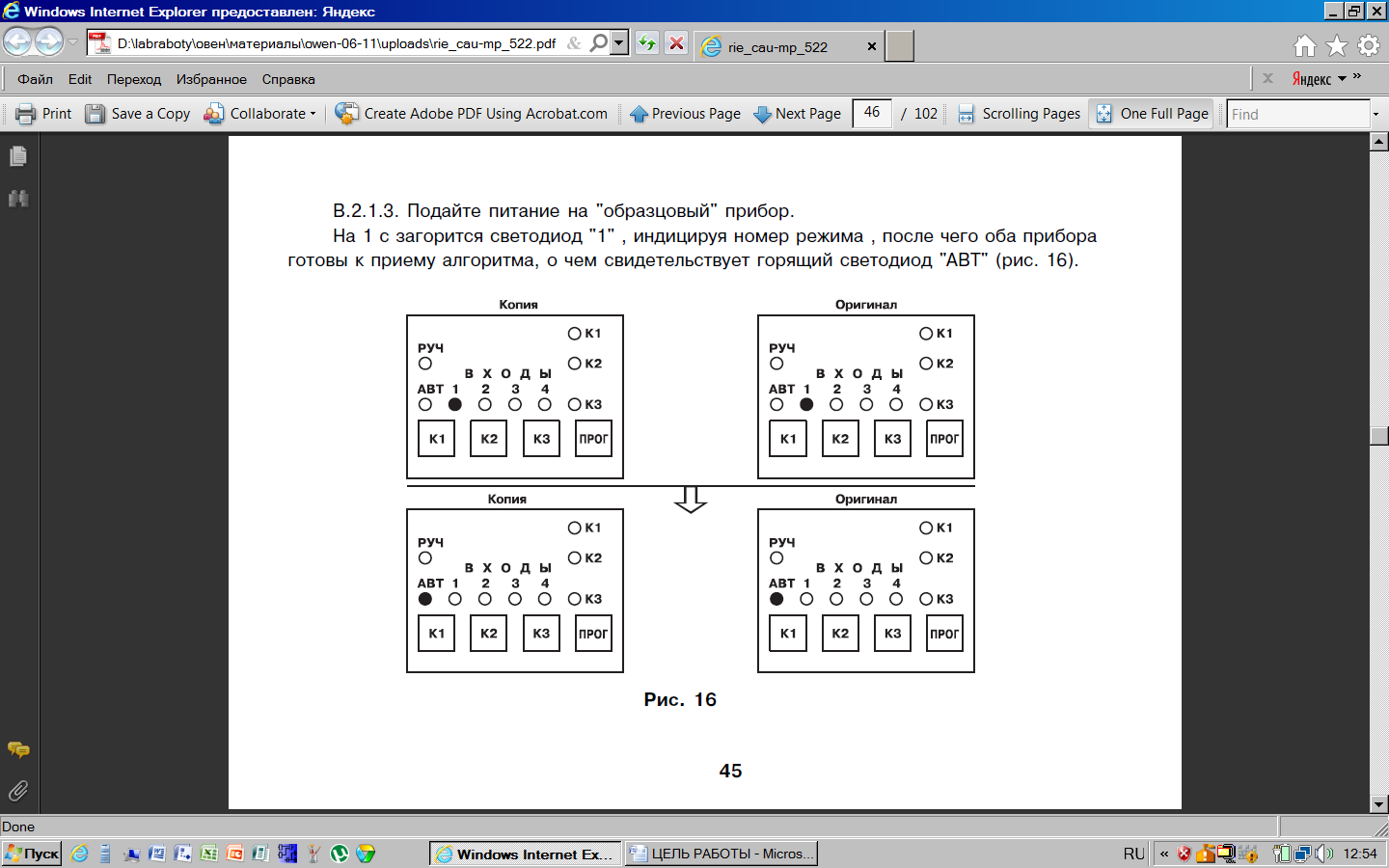
Рис. 5.14. Состояния устройств ОВЕН САУ
– МП при копировании алгоритмов
управления
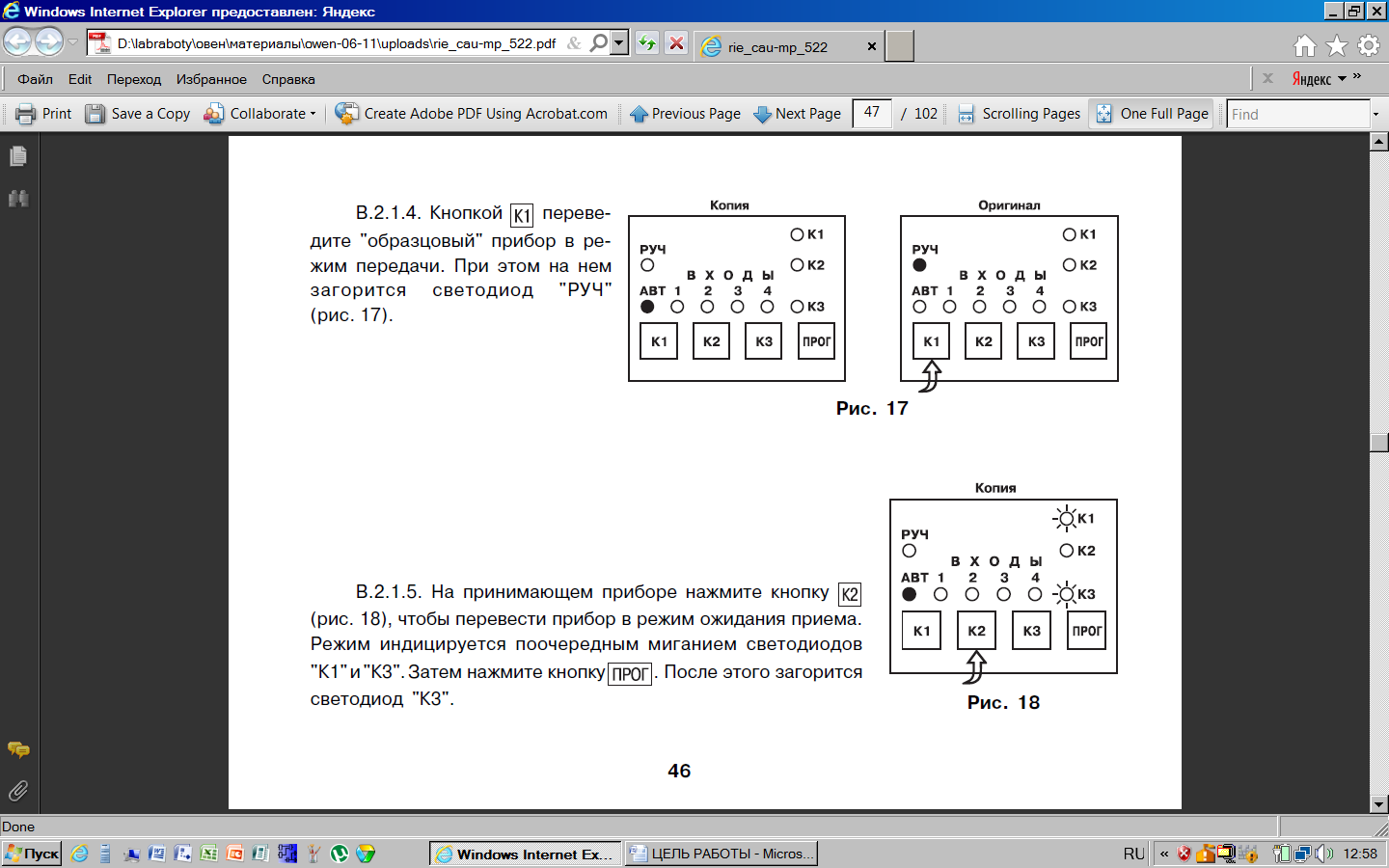
Рис. 5.15. Подготовка устройства ОВЕН
САУ – МП к передаче данных
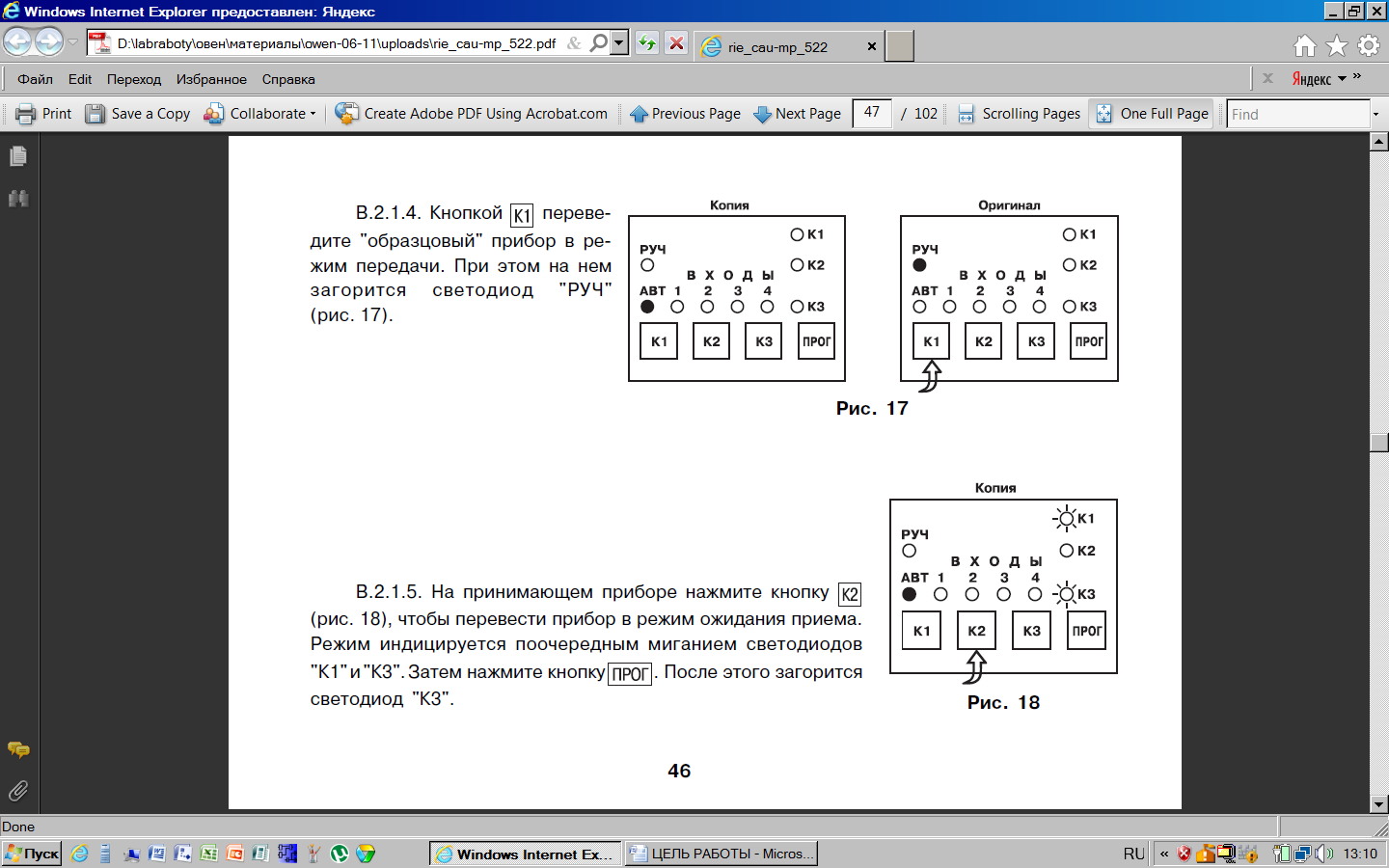
Рис. 5.16. Состояние принимающего устройства
ОВЕН САУ – МП
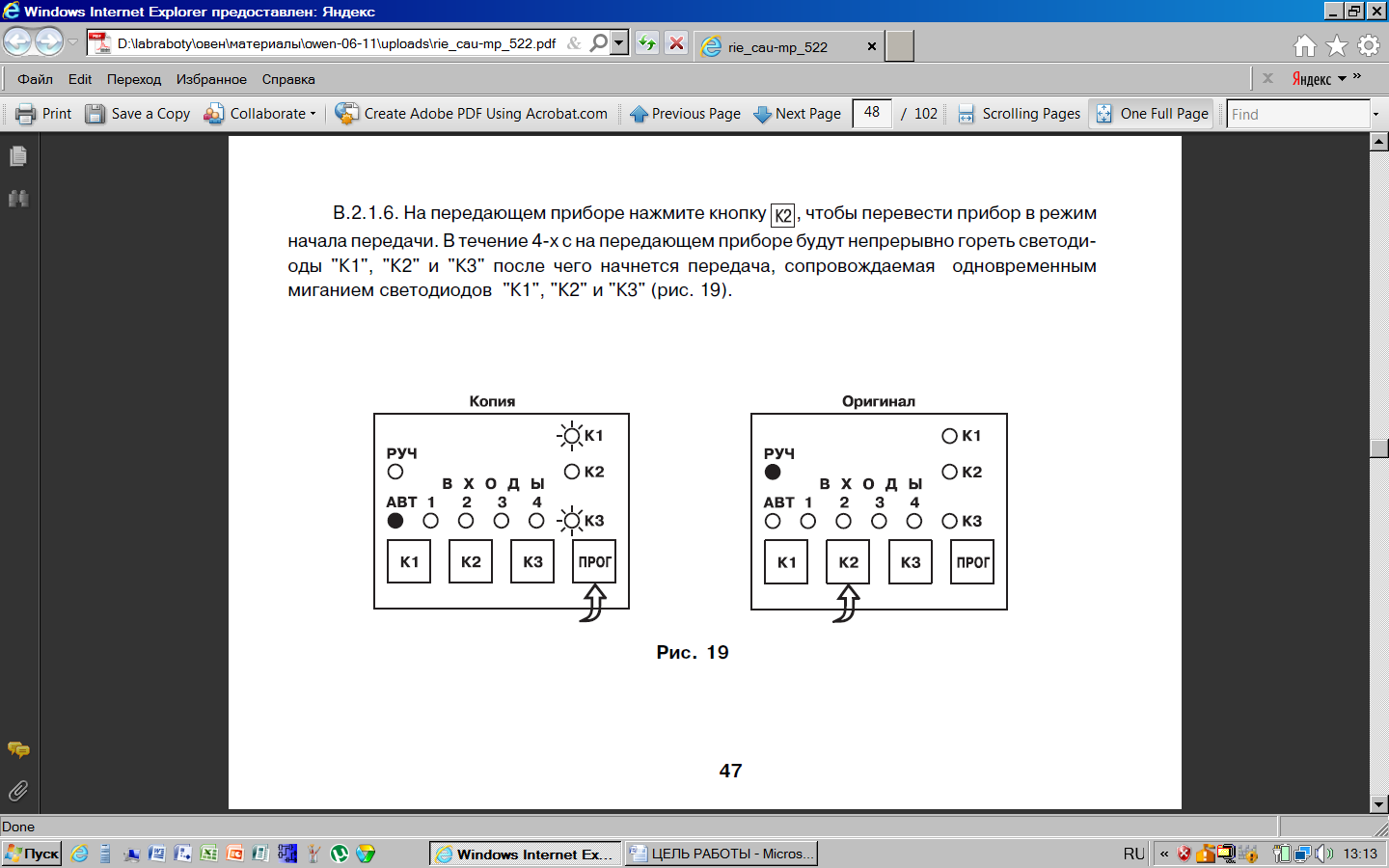
Рис. 5.17. Режим передачи данных в устройствах
ОВЕН САУ – МП
После передачи каждого блока данных
синхронно мигают светодиоды «К1», «К2»
и «К3» на обоих устройствах. После
успешного окончания передачи прекратится
мигание этих светодиодов.
Если после окончания передачи светодиоды
«К1», «К2» и «К3» принимающего устройства
мигают по очереди (рис. 5.18), то операцию
записи алгоритма необходимо повторить.
Копирование алгоритма
из компьютера в устройство
ОВЕН САУ–МП
Соедините параллельный порт компьютера
с устройством специальным кабелем №2.
Внимание! Соединение производить
только при выключенном питании устройства
и компьютера.
Подать питание на устройство и включить
компьютер. На четырех красных светодиодах
«1», «2», «3», «4» устройства ОВЕН САУ –
МП в течение 2 с показывается номер
режима, после чего устройство становится
в режим приема алгоритма, о чем
свидетельствует горящий светодиод
«АВТ» (рис. 5.19).
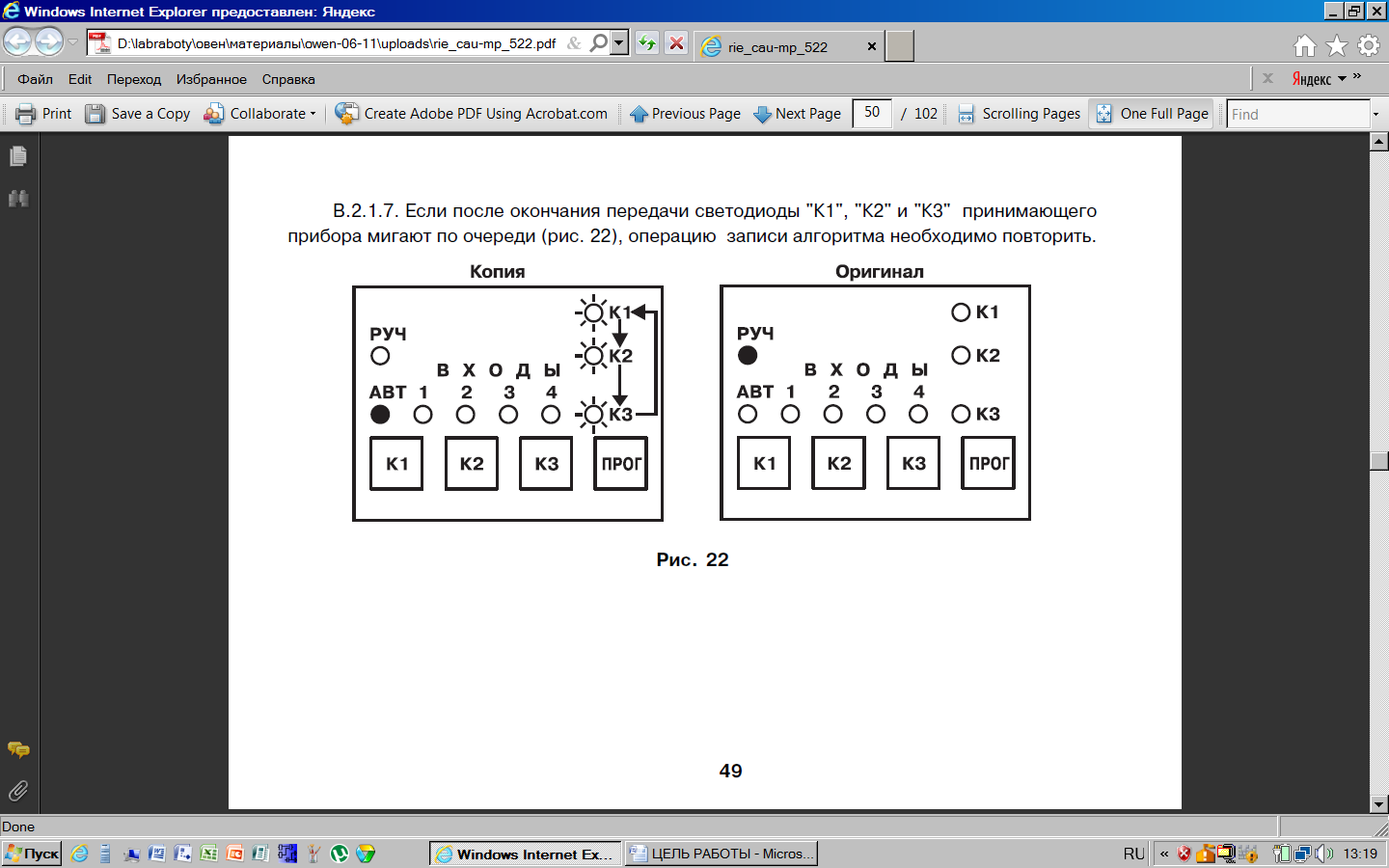
Рис. 5.18. Индикация режима сбоя при
передаче данных
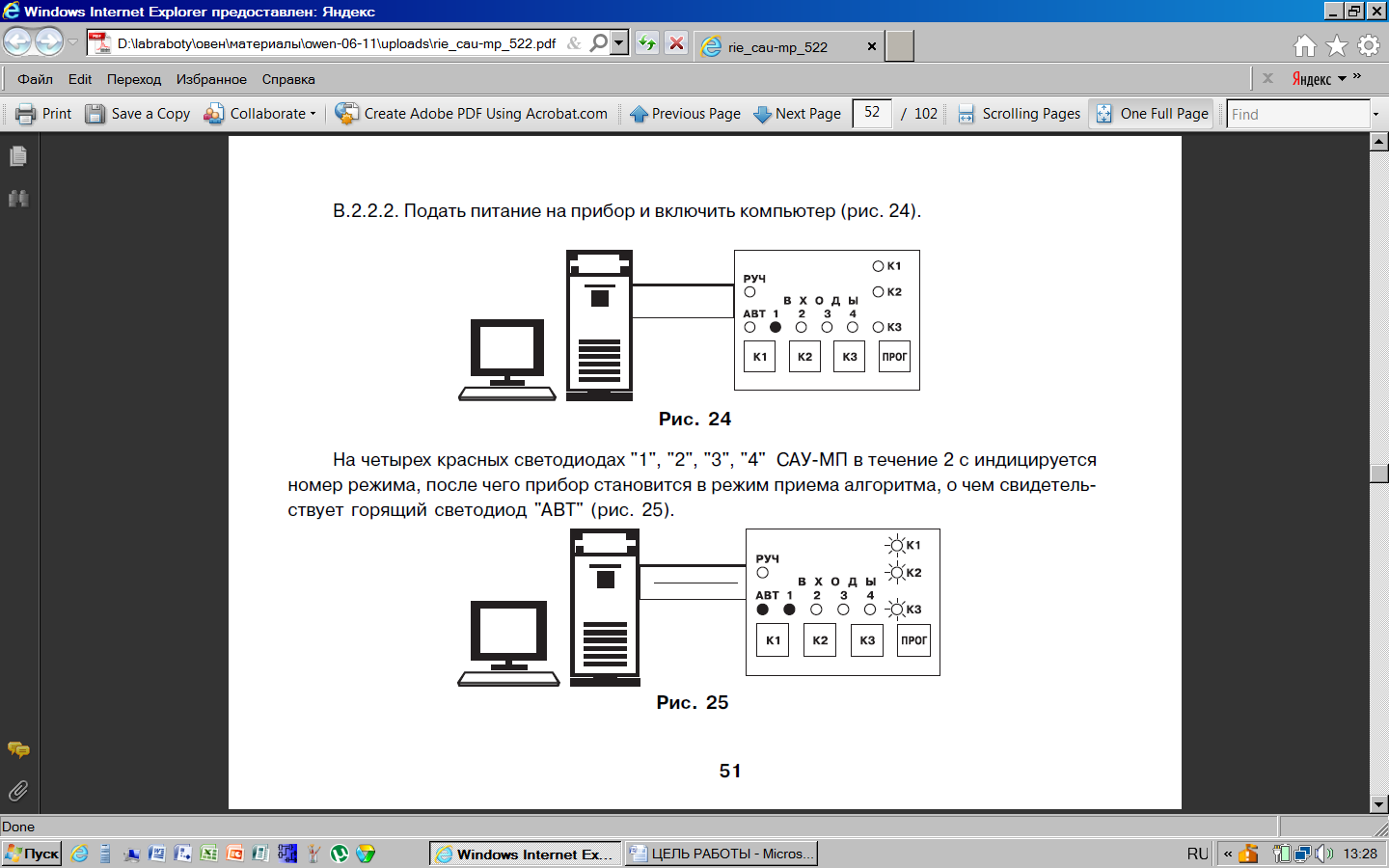
Рис. 5.19. Установка режима приема алгоритма
устройства ОВЕН САУ – МП
Запустить на компьютере программу
загрузки алгоритмов для устройства
ОВЕН САУ – МП. Пользуясь инструкцией
к программе, выбирать на экране компьютера
из меню нужный алгоритм управления. На
устройстве ОВЕН САУ – МП нажать
кнопку «К2», чтобы перевести его в режим
ожидания приема, который показывается
поочередным миганием светодиодов «К1»
и «К3».
Нажать кнопку «ПРОГ» устройства ОВЕН
САУ – МП. После этого дать компьютеру
команду передачи данных. По мере
поступления очередного блока данных
синхронно мигают светодиоды «К1», «К2»
и «К3».
После успешного окончания передачи
прекратится мигание светодиодов «К1»,
«К2» и «К3».
Если после окончания передачи светодиоды
«К1», «К2» и «К3» устройства ОВЕН САУ –
МП мигают по очереди (рис. 5.20), операцию
записи алгоритма необходимо повторить.
В случае успешного окончания процесса
снимите питание с устройства и отсоедините
кабель от разъема Х2.
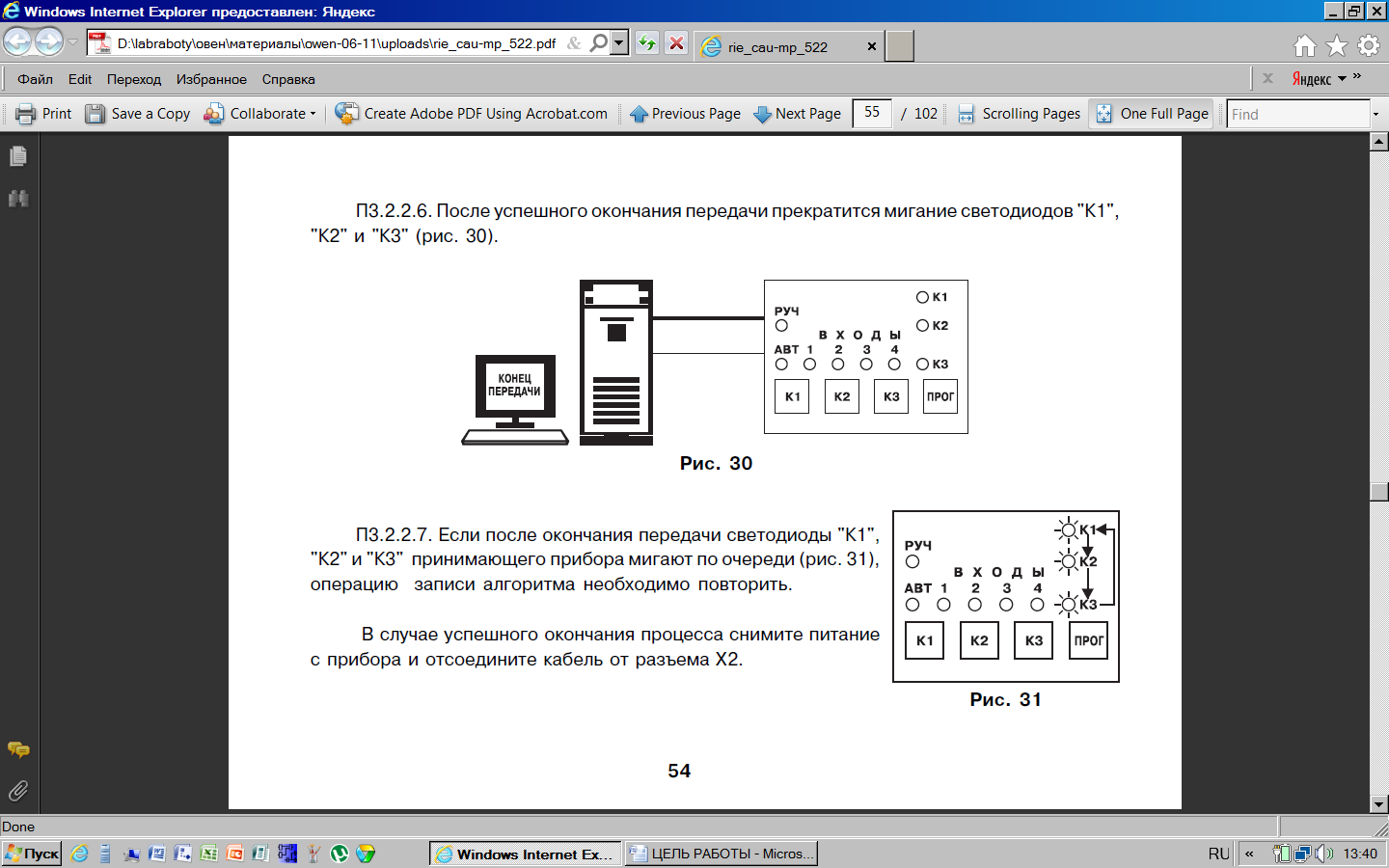
Рис. 5.20. Режим сбоя при передаче алгоритма
в устройство ОВЕН САУ – МП
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #

САУ-МП
Логический контроллер
Руководство по эксплуатации
5
Указания по безопасному применению
В данном руководстве применяются следующие предупреждения:
ОПАСНОСТЬ
Ключевое слово ОПАСНОСТЬ используется для предупреждения о непосредственной
угрозе здоровью. Возможные последствия могут включать в себя смерть, постоянную
или длительную нетрудоспособность.
ПРЕДУПРЕЖДЕНИЕ
Ключевое слово ПРЕДУПРЕЖДЕНИЕ используется, чтобы предупредить о повреждении
имущества и устройств. Возможные последствия могут включать в себя повреждения
имущества, например, прибора или подключенных к нему устройств.
ВНИМАНИЕ
Ключевое слово ВНИМАНИЕ используется, чтобы предупредить о потенциально
опасной ситуации. Возможные последствия могут включать в себя незначительные
травмы.
ПРИМЕЧАНИЕ
Ключевое слово ПРИМЕЧАНИЕ используется для дополнения, уточнения, толкования
основного текста раздела/подраздела и/или пояснения специфических аспектов работы
с прибором.

6
Введение
Настоящее Руководство по эксплуатации предназначено для ознакомления обслуживающего
персонала с устройством, принципом действия, конструкцией, технической эксплуатацией и
обслуживанием САУ-МП, в дальнейшем по тексту именуемого «прибор» или «САУ-МП».
Подключение,
регулировка
и
техобслуживание
прибора
должны
производиться
только
квалифицированными
специалистами
после
прочтения
настоящего
руководства
по
эксплуатации.
Прибор изготавливается в различных модификациях, зашифрованных в коде полного условного
обозначения:
Пример полного названия прибора при заказе:
САУ-МП-Н.11

7
1 Назначение и функции
Прибор предназначен для создания систем автоматизации технологических процессов,
связанных с контролем и поддержанием заданного уровня жидких или сыпучих веществ в
различного рода резервуарах, емкостях, контейнерах и т.п.
САУ-МП используется только в комплекте с датчиками уровня и исполнительными устройствами.
Прибор выпускается согласно ТУ 4217-017-46526536-2009.
Прибор позволяет выполнять следующие функции:
• управление тремя исполнительными механизмами (например, насосами) по выбранному
алгоритму;
• работу с различными по электропроводности жидкостями: водопроводной, загрязненной
водой, молоком и пищевыми продуктами (слабокислотными, щелочными и пр.).
2 Технические характеристики и условия эксплуатации
2.1 Технические характеристики
Таблица 2.1 – Характеристики прибора
Наименование
Значение
Диапазон переменного напряжения питания для всех
типов корпусов:
напряжение
220 (± 10 %) В
частота
50 Гц
Потребляемая мощность, не более
6 ВА
Количество входов
4

8
Продолжение таблицы 2.1
Наименование
Значение
Типы входных датчиков
кондуктометрические зонды;
поплавковые датчики уровня;
активные датчики с выходными ключами
n
–
p
–
n
-типа;
механические контактные устройства;
датчики наличия давления типа ДЭМ
Максимальное допустимое напряжение на входе
5 В
Источник питания активных датчиков:
напряжение источника питания
максимальный ток нагрузки
12 ± 1,2 В
50 мА
Количество встроенных выходных реле
3
Максимально допустимый ток нагрузки,
коммутируемый контактами встроенного реле
8 А при 230 В 50 Гц ( cos φ > 0,4)
Габаритные размеры корпуса (степень защиты со
стороны лицевой панели):
настенного Н
щитового Щ1
105х130х65 мм (IP44)
96x96x65 мм (IP54)
Масса прибора, не более
0,7 кг
Средний срок службы
8 лет
2.2 Условия эксплуатации
Прибор предназначен для эксплуатации при следующих условиях:
• закрытые взрывобезопасные помещения без агрессивных паров и газов;
9
• температура окружающего воздуха от +5 до +50 °С;
• верхний предел относительной влажности воздуха: не более 80 % при +35 °С и более
низких температурах без конденсации влаги;
• атмосферное давление от 84 до 106,7 кПа.
ПРИМЕЧАНИЕ
Требования в части внешних воздействующих факторов являются обязательными, т.к.
относятся к требованиям безопасности.
3 Меры безопасности
ВНИМАНИЕ
На клеммнике присутствует опасное для жизни напряжение величиной до 250 В. Любые
подключения к прибору и работы по его техническому обслуживанию следует
производить только при отключенном питании прибора.
По способу защиты от поражения электрическим током прибор соответствует классу II
по ГОСТ 12.2.007.0-75.
При эксплуатации, техническом обслуживании и поверке необходимо соблюдать требования
ГОСТ 12.3.019-80, Правил эксплуатации электроустановок потребителей и Правил охраны труда
при эксплуатации электроустановок потребителей.
Не допускается попадание влаги на контакты выходного разъема и внутренние электроэлементы
прибора. Запрещено использовать прибор в агрессивных средах с содержанием в атмосфере
кислот, щелочей, масел и т. п.

10
4 Монтаж
4.1 Установка прибора настенного крепления H
Для установки прибора следует выполнить действия:
Рисунок 4.1 – Монтаж прибора
настенного крепления
1. Закрепить кронштейн тремя винтами М4 × 20
на поверхности, предназначенной для
установки прибора (см.
рисунок 4.2
).
ПРИМЕЧАНИЕ
Винты для крепления кронштейна
не входят в комплект поставки.
2. Зацепить крепежный уголок на задней стенке
прибора за верхнюю кромку кронштейна.
3. Прикрепить прибор к кронштейну винтом
из комплекта поставки.
Демонтаж прибора следует производить в обратном
порядке.
ПРИМЕЧАНИЕ
Подключение проводов производится при
снятой крышке прибора. Для удобства
подключения следует зафиксировать
основание прибора на кронштейне
крепежным винтом.

11
Рисунок 4.2 – Габаритные размеры корпуса Н
ПРИМЕЧАНИЕ
Втулки необходимо подрезать в соответствии с диаметром вводного кабеля.

12
4.2 Установка прибора щитового крепления Щ1
Для установки прибора следует выполнить действия:
Рисунок 4.3 – Монтаж прибора
щитового крепления
1. Подготовить на щите управления место
для установки прибора (см.
рисунок 4.4
).
2. Установить прокладку на рамку прибора
для обеспечения степени защиты IP54.
3. Вставить прибор в специально подготовленное
отверстие на лицевой панели щита.
4. Вставить фиксаторы из комплекта поставки
в отверстия на боковых стенках прибора.
5. С усилием завернуть винты М4 х 35
из комплекта поставки в отверстиях каждого
фиксатора так, чтобы прибор был плотно
прижат к лицевой панели щита.
Демонтаж прибора следует производить в обратном
порядке.

13
Рисунок 4.4 – Габаритные размеры корпуса Щ1

14
Рисунок 4.5 – Прибор в корпусе Щ1, установленный в щит толщиной 3 мм
5 Подключение
5.1 Рекомендации по подключению
Для обеспечения надежности электрических соединений рекомендуется использовать медные
многожильные кабели, концы которых перед подключением следует тщательно зачистить,
залудить или использовать кабельные наконечники. Зачистку жил кабелей необходимо
выполнять с таким расчетом, чтобы их оголенные концы после подключения к прибору
не выступали за пределы клеммника. Сечение жил кабелей должно быть не более 1 мм
2
.
15
Общие требования к линиям соединений:
• При прокладке кабелей следует выделить линии связи, соединяющие прибор с датчиком,
в самостоятельную трассу (или несколько трасс), располагая ее (или их) отдельно
от силовых кабелей, а также от кабелей, создающих высокочастотные и импульсные
помехи.
• Для защиты входов прибора от влияния промышленных электромагнитных помех линии
связи прибора с датчиком следует экранировать. В качестве экранов могут быть
использованы как специальные кабели с экранирующими оплетками, так и заземленные
стальные трубы подходящего диаметра. Экраны кабелей с экранирующими оплетками
следует подключить к контакту функционального заземления (FE) в щите управления.
• Следует устанавливать фильтры сетевых помех в линиях питания прибора.
• Следует устанавливать искрогасящие фильтры в линиях коммутации силового
оборудования.
При монтаже системы, в которой работает прибор, следует учитывать правила организации
эффективного заземления:
• все заземляющие линии прокладывать по схеме «звезда», обеспечивая хороший контакт
с заземляемым элементом;
• все заземляющие цепи должны быть выполнены проводами как можно большего сечения;
• запрещается объединять клемму прибора с маркировкой «Общая» и заземляющие линии.
5.2 Порядок подключения
ОПАСНОСТЬ
После распаковки прибора следует убедиться, что при транспортировке прибор не был
поврежден.
16
Если прибор находился длительное время при температуре ниже минус 20 ° С, то перед
включением и началом работ необходимо выдержать его в помещении с температурой,
соответствующей рабочему диапазону, в течение не менее 30 мин.
ПРЕДУПРЕЖДЕНИЕ
Для нормальной эксплуатации насоса, используемого в системе, прибор следует
подключать к сети 230 В 50 Гц через промежуточный автоматический выключатель с
токовой защитой.
Для подключения прибора следует выполнить действия:
1. Подключить прибор к источнику питания.
ВНИМАНИЕ
Перед подачей питания на прибор следует проверить правильность подключения
напряжения питания и его уровень.
2. Подключить линии связи «прибор – датчики» к первичным преобразователям и входам
прибора.
3. Подключить линии связи выходных реле к исполнительным устройствам.
4. Подать питание на прибор.
5. Снять питание.
6. Выполнить настройку прибора.

17
5.3 Назначение клеммника
Рисунок 5.1 – Клеммник прибора в корпусе Н

18
Рисунок 5.2 – Клеммник прибора в корпусе Щ1
5.4 Подключение датчиков
5.4.1 Общие сведения
ПРЕДУПРЕЖДЕНИЕ
Для защиты входных цепей прибора от возможного пробоя зарядами статического
электричества, накопленного на линиях связи «прибор – датчик», перед подключением к
клеммнику прибора их жилы следует на 1 – 2 секунды соединить с винтом
функционального заземления (FE) щита.
При проверке исправности датчика и линии связи необходимо отключить прибор от сети питания.
Во избежание выхода прибора из строя при «прозвонке» связей следует использовать
19
измерительные устройства с напряжением питания не более 4,5 В. При более высоких
напряжениях питания этих устройств отключение датчика от прибора обязательно.
ВНИМАНИЕ
Не допускается прокладка линий связи датчиков уровня с прибором в одной трассе
совместно с силовыми проводами, а также с проводами, несущими высокочастотные
или импульсные токи.
При монтаже внешних соединений следует обеспечить их надежный контакт с клеммником, для
чего рекомендуется зачистить и облудить их концы. Кабельные вводы прибора рассчитаны на
подключение кабелей с наружным диаметром 6 – 12 мм.
При установке датчиков использовать следующие рекомендации:
• Установить датчики уровня жидкости в баке и скважине таким образом, чтобы электроды не
касались металлических стенок. Концы двух длинных электродов каждого датчика
соответствуют нижним уровням воды в баке и скважине, а концы коротких электродов –
верхним уровням.
• Регулирование уровней производится изменением общей высоты установки датчика и
перемещением концов электродов относительно друг друга. Допускается механическое
укорачивание (подрезание) электродов.
• При установке активных датчиков необходимо соблюдать минимальное расстояние между
ними (25 – 30 см) как по вертикали, так и по горизонтали, чтобы избежать взаимного
влияния сигналов.
Каждое входное устройство имеет набор из трех перемычек, которые должны быть удалены или
определенным образом установлены в зависимости от типа подключенного к входу датчика.
Перемычки находятся на задней плате, рядом с входным клеммником прибора.
Функциональная схема одного из четырех входных устройств показана на рисунке ниже.

20
Рисунок 5.3 – Функциональная схема входного устройства
5.4.2 Подключение кондуктометрических зондов
Кондуктометрические зонды
применяются для контроля уровня жидкостей, обладающих
электрической проводимостью. Примеры установки кондуктометрических зондов на объектах
представлены на рисунке ниже.

21
Рисунок 5.4
ПРИМЕЧАНИЕ
При контроле уровня в металлическом резервуаре его корпус следует использовать в
качестве общего электрода.
По мере заполнения резервуара электроды соприкасаются с жидкостью, происходит замыкание
электрических цепей между общим и соответствующими сигнальными входами прибора,
фиксируемое входными устройствами как достижение заданных уровней. Схема подключения
кондуктометрического зонда к прибору приведена на рисунке ниже.

22
Рисунок 5.5 – Схема подключения кондуктометрического зонда (с расположением
перемычек)
Для повышения чувствительности и долговечности кондуктометрических зондов необходимо
перевести
соответствующие
входы
прибора
в
режим
питания
датчиков
переменным
напряжением. Для этого необходимо удалить перемычку “1” соответствующего входного
устройства.
При подключении датчика любого другого типа перемычка “1” должна быть установлена.
Для изменения чувствительности входа в зависимости от электропроводности контролируемой
жидкости устанавливается одна из перемычек “2” или “3”. Для контроля обычной водопроводной
воды и других жидкостей, обладающих относительно низким сопротивлением, устанавливается
перемычка “2”, для жидкостей, обладающих высоким сопротивлением – перемычка “3”.

23
5.4.3 Датчики с выходными ключами
n
–
p
–
n
-типа
Для нормальной работы САУ-МП выходные ключи датчиков должны (при достижении веществом
контролируемого уровня) переключаться из закрытого состояния в открытое.
Питание активных датчиков осуществляется от встроенного в прибор источника постоянного тока
напряжением 12 В или от внешнего блока питания (рисунок ниже).
Для работы с датчиками этого типа на соответствующем входном устройстве должны быть
установлены перемычки «1» и «2».
Рисунок 5.6 – Схема подключения емкостных выключателей: 1) питание от прибора,
2) питание от внешнего источника
5.4.4 Подключение механических контактных устройств
Механические контактные устройства могут применяться для контроля работоспособности
насосов в системах водоснабжения, а также для контроля уровня различных по физико-
химическому составу жидкостей в устройствах поплавкового типа (например, датчики типа ДЭМ).

24
Вместо датчиков этого типа к входам прибора могут быть подключены кнопочные пульты или
тумблеры, для запуска, остановки или изменения хода выполнения процесса.
Схема подключения датчиков с механическими контактами на выходе приведена на рисунке
ниже.
Рисунок 5.7 – Схема подключения датчиков с механическими контактами на выходе
Для работы с датчиками этого типа на соответствующем входном устройстве должны быть
установлены перемычки «1» и «2».
5.4.5 Подключение позисторов и термисторов
Резисторы, изменяющие свое сопротивление в зависимости от температуры по нелинейному
закону (позисторы, термисторы), часто встраивают, например, в обмотки электродвигателей и
используют в качестве датчиков температуры для защитного отключения установок.

25
Подключение термисторов и позисторов к входам прибора производится по схеме, приведенной
на рисунке ниже. При этом должны быть
установлены перемычки «1» и «2».
Номинал этих
резисторов должен находиться в пределах от 100 Ом до 10 кОм.
Рисунок 5.8 – Подключение термисторов и позисторов
5.4.6 Подключение одного датчика к двум входам
Допускается подключение одного датчика одновременно к нескольким входам прибора.
Например, для установки двух уровней температурной защиты («предупредительный сигнал» и
«защитное отключение») следует установить разные значения опорного напряжения для
компараторов, а затем подключить позистор к двум разным входам прибора по схеме, указанной
на рисунке ниже.

26
Рисунок 5.9 – Параллельное подключение датчика температуры к двум разным входам
6 Эксплуатация
6.1 Принцип работы
Функциональная схема прибора приведена на рисунке ниже.

27
Рисунок 6.1 – Функциональная схема прибора
В состав прибора входят:
•
входные устройства
ВУ1…ВУ4, предназначенные для приема сигналов датчиков,
сравнения величины принятого сигнала с заданным и выдачи на блок программируемой
логики соответствующего логического уровня (0 или 1);
28
•
блок программируемой логики
, предназначенный для формирования сигналов
управления выходными реле по принятым от входных устройств сигналам в соответствии с
записанным в его энергонезависимой памяти алгоритмом, а также для приема и
копирования алгоритма из другого прибора САУ-МП или компьютера;
•
выходные электромагнитные реле
, предназначенные для управления исполнительными
механизмами.
Блок программируемой логики включает в себя:
• четыре программируемых источника опорного напряжения для входных устройств;
• набор функциональных элементов (таймеров, счетчиков, генераторов, триггеров и т.д)
Связи между элементами, необходимые для выполняемого прибором алгоритма, сначала
формируются в компьютере с использованием программного обеспечения. Затем загружаются в
энергонезависимую память САУ-МП через кабель.
Алгоритм,
как
правило,
записывается
в
прибор
на
заводе-изготовителе,
однако,
при
необходимости, допускается его замена по методике, изложенной в разделе
Настройка
.
Блок программируемой логики позволяет выполнять следующие функции:
• выполнение заданного алгоритма;
• прием и запись рабочего алгоритма из компьютера или другого «образцового» прибора;
• копирование алгоритма в другой прибор;
• изменение опорных напряжений входных устройств;
• изменение уставок таймеров;
• ручное управление выходными реле;
• отсчет задержки начала выполнения алгоритма.
29
6.2 Управление исполнительными механизмами
Для
управления
технологическим
оборудованием
прибор
оснащен
тремя
встроенными
электромагнитными реле (8 А, 220 В), которые включаются по командам блока программируемой
логики в соответствие с выполняемым алгоритмом.
6.3 Алгоритмы работы
6.3.1 Алгоритм 06 (для трех резервуаров и трех насосов)
Алгоритм 06 предназначен для управления тремя независимыми насосами, каждый из которых
поддерживает уровень жидкости в одной из трех емкостей по показаниям датчиков уровня Д1 …
Д3 (см. рисунок ниже). Датчики уровня подключены ко входам 1…3.

30
Рисунок 6.2
Прибор работает по двум типам логики: прямой и обратной. Если установлена перемычка на
входе 4, то реализуется прямая логика. Если перемычка на входе 4 отсутствует – обратная
логика.
ПРИМЕЧАНИЕ
Нельзя настроить прибор так, чтобы один насос работал согласно прямой логике, а
остальные – согласно обратной..
При
прямой логике
насос включается при осушении кондуктометрического датчика (размыкании
контактов) и начинает закачивать в бак жидкость, пока ее уровень не повысится до положения
31
уровня установленного датчика (работа на заполнение емкости – заводская установка по
умолчанию).
При
обратной логике
насос включается при затоплении кондуктометрического датчика
(замыкании контактов) и начинает откачивать жидкость из бака, пока ее уровень не понизится до
положения ниже уровня установленного датчика(работа на осушение емкости).
При изменении состояния датчика на время, большее заданного (см. раздел
Настройка
),
происходит включение/выключение насоса согласно заданной логике. При изменении состояния
датчика на время, меньшее уставки задержки, состояние насоса не меняется.
Например, при замыкании контактов датчика на время, большее 7 с (значение уставки задержки
по умолчанию) при прямой логике работающий насос 1 выключается. Включится он, если
контакты датчика Д1 будут разомкнуты дольше 7 с (по умолчанию). Аналогичным образом
работают и другие насосы.
6.3.2 Алгоритм 11 (для магистрали водоснабжения с двумя насосами)
Алгоритм предназначен для управления двумя работающими поочередно насосами (основным и
резервным), имеющими общий датчик наличия потока. В качестве датчика может быть
использован датчик ДЭМ. Предусмотрена возможность аварийной сигнализации или включения
третьего насоса. Схема подключения САУ-МП к элементам системы приведена на рисунке ниже.

32
Рисунок 6.3
Реле 1 и 2 управляют работой основного и резервного насоса. Реле 3 включает сигнализацию об
аварии или третий насос. Датчик наличия потока ДЭМ подключается к четвертому входу
прибора.
К первому входу следует подключить тумблер, замыкание которого запускает выполнение
алгоритма.
Алгоритм работы:
1. После включения питания САУ-МП отрабатывает задержку включения Т0, затем проверяет
состояние входа 1 и, если тумблер замкнут, включает первый насос.
2. Если в течение заданного времени в трубе создается необходимое давление, контакты
датчика наличия потока замыкаются и работает 1-й насос. По истечении заданного
времени реле 1 выключается и включается реле 2, управляющее вторым насосом. Если
33
второй насос исправен, то контакты ДЭМ окажутся замкнуты, и работа насоса будет
продолжена.
3. Через заданное время прибор выключит реле 2 и снова включит реле 1, обеспечивая
равномерный износ основного и резервного насоса.
4. Если во время работы одного из насосов контакты ДЭМ разомкнулись на время, большее
заданного, или во время пуска двигателя насоса через заданное время контакты ДЭМ не
замкнулись, прибор считает, что произошла авария и включает резервный насос. При этом
неисправный насос выключается, а соответствующий ему светодиод (
К1
или
К2
) начинает
мигать.
5. Если в процессе работы вышли из строя оба насоса, то включается третье реле, к
которому подключен третий насос или аварийная сигнализация. В этом случае начинают
мигать оба светодиода
К1
и
К2
. Третье реле будет замкнуто до снятия с прибора питания
или до перезапуска алгоритма тумблером, подключенном ко входу 1.
6.3.3 Алгоритм 12 (для одного резервуара и двух насосов)
Алгоритм предназначен для управления двумя работающими поочередно насосами (основным и
резервным), имеющими общий датчик наличия потока. Предусмотрена возможность аварийной
сигнализации или включения третьего насоса. Схема подключения САУ-МП к элементам
системы приведена на рисунке ниже.

34
Рисунок 6.4
Датчик верхнего уровня подключается к второму входу прибора, датчик нижнего уровня – к
третьему. К первому входу подключен тумблер, замкнутое состояние которого разрешает начать
выполнение алгоритма. Датчик наличия потока ДЭМ подключается к четвертому входу прибора.
Реле1 и 2 управляют работой основного и резервного насоса.
35
Алгоритм работы:
1. После включения питания САУ-МП отрабатывает задержку включения Т0, а затем
проверяет состояние входа1. Если тумблер замкнут, то проверяется состояние длинного
электрода (вход3). Если длинный электрод осушен, то включается реле 1, управляющее
первым насосом.
2. Если в течение заданного времени в трубе создается необходимое давление, контакты
датчика наличия потока замыкаются, и 1-й насос работает до затопления датчика верхнего
уровня. В следующий раз при осушении датчика нижнего уровня включится реле 2, и
заполнять емкость будет второй насос. Таким образом обеспечивается равномерный износ
основного и резервного насоса.
3. Если во время работы одного из насосов контакты ДЭМ разомкнулись на время, большее
заданного, прибор считает, что произошла авария и включает резервный насос.
Неисправный насос выключается, а соответствующий ему светодиод (
К1
или
К2
) начинает
мигать.
4. Если в процессе работы вышли из строя оба насоса, то начинают мигать оба светодиода
К1
и
К2
.
6.3.4 Алгоритм 13 (для магистрали водоснабжения с двумя насосами)
Алгоритм предназначен для управления двумя работающими поочередно насосами (основным и
резервным) в системах водоснабжения, имеющих в своем составе общий датчик наличия потока.
Отличие данного алгоритма
от алгоритма 11 состоит в логике работы реле 3. Реле включается
на заданное время каждый раз при включении или переключении насосов.

36
Рисунок 6.5
Реле 3 в этом алгоритме использовано для переключения схемы питания насосов из звезды в
треугольник на время пуска, если этого требуют условия их эксплуатации, или для создания
паузы между переключением насосов, необходимой для срабатывания отсечных клапанов.
6.3.5 Алгоритм 14 (для одной магистрали и трех насосов)
Алгоритм предназначен для управления тремя насосами, которые работают парами. Каждый
насос имеет свой датчик наличия потока, замыкание контактов которого свидетельствует о
нормальной работе насоса. В автоматическом режиме насосы работают поочередно парами (1-
2, 1-3, 2-3, 1-2 и т. д.) и по истечении заданного времени (например, 12 часов) происходит
переключение работающей пары насосов по схеме, приведенной на рисунке ниже:

37
Рисунок 6.6
В случае выхода из строя любого из работающих насосов по сигналу соответствующего датчика
давления включается третий резервный насос. Оставшиеся насосы работают не выключаясь до
вмешательства оператора или до выхода из строя. О выходе насоса из строя сигнализирует
миганием соответствующий светодиод (
К1
,
К2
,
К3
).
Схема подключения САУ-МП к элементам системы приведена на рисунке ниже.
Рисунок 6.7
Тумблер «ПУСК» выполняет функцию дистанционного выключателя, а также использован для
аварийной защиты. Если в дистанционном управлении нет необходимости, на месте тумблера
(вход 4) следует установить перемычку.

38
6.3.6 Алгоритм 15 (для магистрали водоснабжения с двумя насосами)
Алгоритм предназначен для управления двумя работающими поочередно насосами (основным и
резервным) в системах водоснабжения, имеющих в своем составе общий датчик потока.
Отличие данного алгоритма от алгоритма 11 состоит в логике работы реле 3. Реле включается не
только при отказе обоих насосов, но и при отказе любого из них.
Схема подключения САУ-МП к элементам системы приведена на рисунке ниже.
Рисунок 6.8
Реле 1 и 2 управляют работой основного и резервного насоса. Реле 3 включает сигнализацию об
аварии одного из насосов. Датчик наличия потока ДЭМ подключается к четвертому входу
прибора.
К первому входу подключен тумблер (перемычка), замыкание которого запускает выполнение
алгоритма.
39
Алгоритм работы:
1. После включения питания САУ-МП отрабатывает задержку включения Т0, затем проверяет
состояние входа 1 и, если тумблер замкнут, включает первый насос.
2. Если в течение заданного времени в трубе создается необходимое давление, контакты
датчика давления замыкаются, первый насос продолжает работать. По истечение
заданного времени реле 1 выключается и включается реле 2, управляющее вторым
насосом. Если второй насос исправен, контакты датчика давления ДЭМ останутся
замкнутыми, второй насос продолжает работать.
3. Через заданное время прибор выключит реле 2 и включит реле 1, обеспечивая
равномерный износ основного и резервного насосов.
4. Если во время работы одного из насосов контакты датчика давления ДЭМ разомкнулись на
время, большее заданного, или во время пуска двигателя насоса через заданное время не
замкнулись, прибор считает, что произошла авария запускаемого насоса, выключает его,
Неисправный насос выключается, а соответствующий ему светодиод (
К1
или
К2
) начинает
мигать.
5. Если в процессе работы вышли из строя оба насоса, то начинают мигать оба светодиода
(
К1
и
К2
). Если третий канал задействован для аварийной сигнализации, реле 3
замыкается и мигает светодиод
К3
.
6.3.7 Алгоритм 16 (для одного резервуара и двух насосов)
Алгоритм предназначен для управления двумя работающими поочередно насосами (основным и
резервным), имеющими общий датчик наличия потока. Предусмотрена возможность аварийной
сигнализации или включения третьего насоса.
Отличие данного алгоритма
от алгоритма 12
состоит в том, что насосы работают на осушение расходного резервуара, а не на наполнение.
Схема подключения САУ-МП к элементам системы приведена на рисунке ниже.

40
Рисунок 6.9
Датчик верхнего уровня подключается к второму входу прибора, датчик нижнего уровня – к
третьему. К первому входу подключен тумблер, замыкание которого запускает выполнение
алгоритма. Датчик наличия потока ДЭМ подключается к четвертому входу прибора.
Реле 1 и 2 управляют работой основного и резервного насосов.
Работа алгоритма:
1. После включения питания САУ-МП отрабатывает задержку включения Т0 а затем
проверяет состояние входа 1. Если тумблер замкнут, то проверяется состояние короткого
41
электрода (вход 2). Если короткий электрод замкнут, то включается реле 1, управляющее
первым насосом. Если в течение заданного времени в трубе создается необходимое
давление, контакты датчика наличия потока замыкаются и 1-й насос работает до осушения
датчика нижнего уровня. В следующий раз при заливании датчика верхнего уровня
включится реле 2 и осушать емкость будет второй насос. Таким образом обеспечивается
равномерный износ основного и резервного насоса
2. Если во время работы одного из насосов контакты ДЭМ разомкнулись на время, большее
заданного, прибор считает, что произошла авария и включает резервный насос.
Неисправный насос выключается, а соответствующий ему светодиод (
К1
или
К2
) начинает
мигать.
3. Если в процессе работы вышли из строя оба насоса, то начинают мигать оба светодиода
(
К1
и
К2
). Если третий канал задействован для аварийной сигнализации, реле 3
замыкается и мигает светодиод
К3
.
6.3.8 Алгоритм 17 (для одной магистрали и трех насосов)
Алгоритм предназначен для управления тремя насосами, работающими поочередно. Каждый
насос имеет свой датчик наличия потока, замыкание контактов которого свидетельствует о
нормальной работе насоса.
Работа алгоритма:
1.
В автоматическом режиме
одновременно работает только один насос. По истечении
заданного времени работы происходит его выключение и включение следующего насоса в
порядке: Насос 1 → Насос 2 → Насос 3 → Насос 1 → Насос 2 и т.д. (цикл повторяется).
2. При включении насоса в работу в течение определенного времени (уставки Т1, Т13 и Т25
для 1–го, 2–го и 3–го насосов, соответственно) не производится контроль замыкания
42
контактов датчика давления данного насоса для того, чтобы насос набрал требуемые
обороты.
3. Если же по окончании данного интервала контакты датчика давления не замкнулись, то
происходит блокировка этого насоса, о чем сигнализирует миганием соответствующий
светодиод. После чего включается следующий по порядку из имеющихся исправных
насосов.
4. То же самое происходит, если во время работы насоса контакты его датчика давления
размыкаются на время, большее заданного (уставки Т3, Т15 и Т28 для 1-го, 2-го и 3-го
насосов, соответственно).
5. В дальнейшем работают два оставшихся исправных насоса.
При выходе из строя еще одного насоса последний исправный насос работает не
выключаясь до вмешательства извне или до выхода из строя.
6.3.9 Алгоритм 18 (для одного резервуара и двух насосов)
Алгоритм предназначен для управления насосной установкой, состоящей из двух насосов
(основного и резервного), которые работают на осушение емкости. Для контроля уровня
жидкости в емкости используется два погружных кондуктометрических датчика – датчик нижнего
уровня Д2, подключенный ко Входу 2, и датчик верхнего уровня Д3, подключенный ко Входу 3 (см.
рисунок ниже).

43
Рисунок 6.10
Отличие работы данного алгоритма
от других состоит в отсутствии датчика давления в
магистрали, по состоянию контактов которого судят об исправности насосов. Для определения
исправности насосов в данной установке вместо датчика наличия потока используется
небольшая контрольная емкость, через которую насосы выкачивают жидкость. В ней установлен
датчик уровня на высоте, до которой один из насосов накачивает жидкость за заданное время.
Если за время, заданное в параметрах
t1
или
t13
, датчик затопляется, то работающий в данный
момент насос считается исправным.
44
Другой особенностью данной установки является задержка включения насоса после заливания
жидкостью датчика верхнего уровня (Д3).
Работа алгоритма:
1. При включении питания прибор контролирует состояние входа 3, т.е. проверяет, осушены
электроды датчика Д3, или нет. Если контакты датчика замкнуты, прибор отсчитывает
время Т25, после чего включает насос 1. Если контакты разомкнуты, то ждет замыкания.
2. Выключение насоса производится после осушения датчика Д2.
В случае неисправности основного насоса 1 реле 1 выключается, включается резервный
насос 2, управляемый реле 2. Одновременно включается реле 3, сигнализируя о
неисправности насоса. В случае выхода из строя любого насоса (основного или
резервного) соответствующий светодиод («К1» или «К2») мигает с частотой один раз в
секунду.
3. Ко Входу 1 прибора подключен дистанционный включатель (тумблер
ПУСК
), выключающий
работающий насос вне зависимости от состояния датчиков. При включении данного
тумблера прибор начинает работать аналогично работе при включении питания прибора,
при этом снимаются блокировки с неработающих насосов (одного или двух). При
отсутствии необходимости в дистанционном выключателе на контакты 9 и 11 необходимо
установить постоянную перемычку или тумблер.
6.3.10 Алгоритм 20 (подержание уровня жидкости)
ВНИМАНИЕ
Алгоритм работает только в режиме питания датчиков от источника постоянного тока,
встроенного в прибор.
Алгоритм предназначен для поддержания уровня жидкости (долива) в основной емкости при
перекачке жидкости из любой другой, например, водозаборной скважины или колодца. Для

45
управления используются датчики уровней и предусмотрена возможность включения аварийной
сигнализации о переполнении основной емкости (контактами реле 3), а также сигнализации
сухого хода насоса (контактами реле 2).
Рисунок 6.11
В емкости устанавливается пятиэлектродный кондуктометрический датчик. Ко входу 1
подключается электрод сухого хода, к входам 2 и 3 подключаются датчики нижнего и верхнего
рабочих уровней, соответственно, ко входу 4 подключается электрод перелива. Пятый электрод
осуществляет функцию общего.
Выход 1 прибора осуществляет защиту насоса от сухого хода (последовательно включается в
цепь управления насосом). Выход 2 осуществляет включение насоса в зависимости от уровня в
емкости (система работает на долив от нижнего до верхнего рабочего уровня). Выход 3
осуществляет сигнализацию о переливе.
Для предотвращения преждевременного срабатывания защиты от сухого хода введены задержки
на включение/отключение реле 1 при смачивании/осушении датчика «сухого хода» (
Т1
,
Т2
).

46
Для предотвращения преждевременного срабатывания защиты при переливе введены задержки
на включение/отключение реле 3 при смачивании/осушении датчика «аварийного перелива»
(
Т25
,
Т26
).
6.4 Индикация и управление
На лицевой панели прибора расположены элементы индикации и управления (см. рисунок ниже):
• девять светодиодов;
• четыре кнопки.
Рисунок 6.12 – Лицевая панель прибора

47
Таблица 6.1 – Назначение светодиодов
Светодиод
Состояние
Значение
РУЧ
Светится
Прибор работает в ручном режиме работы
АВТ
Мигает
РУЧ
Мигает
Прибор работает в автоматическом режиме работы
АВТ
Светится
РУЧ
Мигает
Прибор работает в режиме отсчета задержки начала
выполнения алгоритма
АВТ
Мигает
Входы 1
…
4
Светится
Уровень рабочего тела достиг соответствующего датчика
К1
…
К3
Светится
Задействовано соответствующее выходное реле
Таблица 6.2 – Назначение кнопок
Кнопка
Режим эксплуатации
прибора
Значение
Работа
Переключение прибора между режимами — ручным и
автоматическим
Прием/передача
Прием и запись алгоритма в энергонезависимую память
Задержка выполнения
алгоритма
Переход к выполнению алгоритма
…
Ручное управление
Управление соответствующим выходным реле
Прием/передача
Начало передачи алгоритма в другой прибор

48
6.5 Работа с прибором
Прибор САУ-МП работает в
ручном
и
автоматическом
режимах управления реле.
Если с платы индикации прибора удалены все перемычки, то после подачи питания прибор
переходит в режим отсчета задержки начала выполнения алгоритма, заданной в уставке Т0 =
16 сек. После окончания отсчета или кратковременного нажатия на кнопку
прибор переходит
к выполнению заданного алгоритма (
в автоматическом режиме
).
Перевод прибора в
режим ручного управления
осуществляется нажатием и удержанием в
течение 3 с кнопки
.
При работе в режиме ручного управления возможно включение выходных реле прибора при
нажатии на одноименную кнопку
К1
,
К2
или
К3
независимо от состояния датчиков. Реакция на
кнопку происходит после ее отпускания. Длительность нажатия должна быть не менее 2 с.
Перевод прибора в режим автоматического управления производится повторным нажатием
кнопки
.
7 Настройка
7.1 Общие сведения
Настройка
прибора
заключается
в
установке
значений
опорных
напряжений
входных
компараторов, коррекции временных параметров и чувствительности активных датчиков (при
использовании их для контроля уровня).

49
Для настройки прибора следует выполнить действия:
1. Перевести прибор в режим измерения напряжения на входах. Для этого при выключенном
питании вскрыть прибор и установить перемычку на плате индикации в положение 4 (см.
рисунок ниже). Установить перемычки
Вх1
,
Вх2
,
Вх3
на плате блока питания в положение,
соответствующее используемым датчикам и закрыть корпус прибора.
Рисунок 7.1 – Положение перемычки на плате индикации в режиме измерения
напряжения на входах
2. Подключить к прибору датчики.
3. Подать на прибор питание. На передней панели прибора на 1 сек засветится светодиод
4
,
подтверждающий, что прибор работает в режиме измерения напряжения на входах. Затем
на индикаторах появится значение напряжения на первом входе. Значение от 0 до 255
выдается в двоичном коде на индикаторы:
К1
,
К2
,
К3
,
ВХОДЫ 4, 3, 2, 1
,
АВТ
, младший
разряд на –
К1
(см. рисунок ниже).

50
Рисунок 7.2
4. Для выбора следующего входа нажать и удерживать кнопку
. На передней панели по
очереди будут начинать светиться светодиоды
1
,
2
,
3
,
4
, индицируя номер выбранного
входа. Отпустить кнопку
, когда будет выбран соответствующий вход и на индикаторах
отобразится текущее значение измеренного на нем напряжения (рисунок ниже).

51
Рисунок 7.3
5. Записать показания прибора при затопленных и осушенных кондуктометрических
датчиках, при замкнутых и разомкнутых ключах или при установленных пороговых
значениях выходных сигналов с датчиков.
6. Снять питание с прибора, установить перемычку на плате индикации в положение 3 и 8
основываясь на данных полученных измерений, установить необходимые значения
опорных напряжений для входных компараторов.
7. Снять питание с прибора, удалить перемычки с платы индикации и вновь подать питание.
8. При использовании кондуктометрических или активных датчиков уровня произвести
постепенное заполнение резервуара, контролируя по мере замыкания датчиков засветку
соответствующих светодиодов на лицевой панели прибора.
52
9. Если при заполнении резервуара засветки светодиодов (или любого из них) не происходит,
следует изменить значение опорного напряжения или переставить перемычку из
положения
2
в положение
3
на нижней плате (при работе с кондуктометрическими
датчиками)
10. Произвести постепенное опорожнение резервуара, контролируя при этом
последовательное гашение соответствующих светодиодов на лицевой панели прибора.
11. Для проверки качества настройки произвести повторное заполнение и опорожнение
резервуара, контролируя при этом работу входных датчиков по светодиодам.
12. Вместо терморезистора подключите к соответствующему входу прибора магазин
сопротивлений и проконтролируйте величину сопротивления датчика, при которой
срабатывает входное устройство.
13. В случае необходимости, пользуясь методикой, изложенной в разделе
Изменение
опорных напряжений входных компараторов
, откорректировать величину опорного
напряжения соответствующего входного устройства.
Прибор готов к эксплуатации.
7.2 Подготовка к работе
ПРИМЕЧАНИЕ
Кабель для программирования и программное обеспечение для ПК в комплект поставки
не входит.
Порядок действий следующий:
1. Занести в память прибора требуемые уставки таймеров и опорные напряжения для
входных устройств.

53
2. Проверить правильность выполнения алгоритма, имитируя срабатывание входных
датчиков.
3. Если алгоритм выполняется правильно— удалить все перемычки с коммутационного поля
Х2 платы индикации прибора. Прибор готов к эксплуатации.
4. Если алгоритм выполняется неправильно, произвести его загрузку из ПК или из другого
«эталонного» прибора.
7.3 Настройка алгоритма 06
Положение перемычек
Вх1
,
Вх2
,
Вх3
и
Вх4
, требуемое для работы данного алгоритма, показано
на рисунке ниже.
Рисунок 7.4
54
Уставки задержек и их значения:
• для 1-го насоса –
Т1
,
Т2
;
• для 2-го насоса –
Т13
,
Т14
;
• для 3-го насоса –
Т25
,
Т26
.
Здесь
Т1 = Т13 = Т25 = 7 сек (по умолчанию) – время, в течение которого не происходит изменение
сигнала с 0 на 1 (выкл/вкл);
Т2 = Т14 = Т26 = 7 сек (по умолчанию) – время, в течение которого не происходит изменение
сигнала с 1 на 0 (вкл/выкл).
Значения остальных уставок равны 0, поскольку в работе данного алгоритма они не
используются.
7.4 Настройка алгоритма 11
На рисунке ниже показано положение перемычек
Вх1
,
Вх2
и
Вх3
, требуемое для данного
алгоритма.

55
Рисунок 7.5
Уставки задержек и их значения, установленные в приборе по умолчанию, приведены ниже.
Уставки 1-го насоса:
• Т1 = 30 сек – время, в течение которого при запуске двигателя насоса в данном канале не
анализируются показания датчика давления;
• Т3 = 2 сек, Т4 = 2 сек – время, в течение которого при работе двигателя насоса в данном
канале допускаются «провалы» показаний датчика давления;
• Т7 = 1 сек, Т8 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода насоса при индикации отказа его двигателя
56
Уставки 2-го насоса:
• Т13 = 30 сек – время, в течение которого при запуске двигателя насоса в данном канале не
анализируются показания датчика давления;
• Т15 = Т16 = 2 сек – время, в течение которого при работе двигателя насоса в данном канале
допускаются «провалы» показаний датчика давления;
• Т19 = Т20 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода насоса при индикации отказа его двигателя.
Уставки, общие для прибора:
• Т25 = 45 сек, Т26 = 50 сек – «учебные» значения; время работы первого и второго насосов;
для реальной работы должны иметь значения, например, 24 и 24 часа.
7.5 Настройка алгоритма 12
На рисунке ниже показано положение перемычек
Вх1
,
Вх2
,
Вх3
и
Вх4
, требуемое для данного
алгоритма.

57
Рисунок 7.6
Уставки задержек и их значения, установленные в приборе по умолчанию, приведены ниже.
Уставки 1-го насоса:
• Т1 = 30 сек – время, в течение которого при запуске двигателя насоса в данном канале не
анализируются показания датчика давления;
• Т3 = Т4 = 2 сек – время, в течение которого при работе двигателя насоса в данном канале
допускаются «провалы» показаний датчика давления;
• Т7 = 1Т8 = 1 сек – длительность периодов включенного и выключенного состояния
светодиода насоса при индикации отказа его двигателя.
58
Уставки 2-го насоса:
• Т13 = 30 с – время, в течение которого при запуске двигателя насоса в данном канале не
анализируются показания датчика давления;
• Т15 = Т16 = 2 сек – время, в течение которого при работе двигателя насоса в данном канале
допускаются «провалы» показаний датчика давления;
• Т19 = Т20 = 1 сек – длительность периодов включенного и выключенного состояния
светодиода канала при индикации отказа его двигателя.
Уставки, общие для прибора:
• для правильного выполнения алгоритма должны быть установлены значения Т27 = 1 сек,
Т28 = 0 сек.
7.6 Настройка алгоритма 13
На рисунке ниже показано положение перемычек
Вх1
,
Вх2
и
Вх3
, требуемое для данного
алгоритма.

59
Рисунок 7.7
Уставки задержек и их значения, установленные в приборе по умолчанию, приведены ниже.
Уставки 1-го насоса:
• Т1 = 30 сек – время, в течение которого при запуске двигателя насоса в данном канале не
анализируются показания датчика давления;
• Т3 = Т4 = 2 сек – время, в течение которого при работе двигателя насоса в данном канале
допускаются «провалы» показаний датчика давления;
• Т5 = 3 сек – задает задержку включения напряжения на двигатель по отношению к
включению сигнала на переключение «треугольник — звезда» при пуске двигателя;
• Т7 = 1 сек, Т8 = 1 сек – длительность периодов включенного и выключенного состояния
светодиода насоса при индикации отказа его двигателя насоса.
60
Уставки 2-го насоса:
• Т13 = 30 сек – время, в течение которого при запуске двигателя насоса в данном канале не
анализируются показания датчика давления;
• Т15 = Т16 = 2 сек – время, в течение которого при работе двигателя насоса в данном канале
допускаются «провалы» показаний датчика давления;
• Т17 = 3 сек – задает задержку включения напряжения на двигатель по отношению к
включению сигнала на переключение «треугольник — звезда» при пуске двигателя;
• Т19 = Т20 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода канала насоса при индикации отказа его двигателя.
Уставки, общие для прибора:
• задержки Т25 = Т27 = 20 сек – отвечают за интервал времени, в течение которого при
запуске двигателя насоса выдается сигнал переключения «треугольник — звезда» в первом и
втором каналах;
• Т29 = 45 с, Т30 = 50 сек – задают интервалы времени работы 1-го и 2-го насосов,
соответственно; для реальной работы должны иметь значения, например, 24 и 24 часа.
7.7 Настройка алгоритма 14
Расположение перемычек
Вх1
,
Вх2
,
Вх3
,
Вх4
, требуемое для работы данного алгоритма,
приведено на рисунке ниже.

61
Рисунок 7.8
Уставки задержек и их значения, установленные в приборе по умолчанию, приведены ниже.
Уставки 1-го насоса:
• Т1 = 30 сек – время, в течение которого не анализируются показания датчика давления Д1
при запуске двигателя;
• Т3 = Т4 = 2 сек – время, в течение которого допускается кратковременное замыкание и
размыкание контактов датчика давления («провалы» показаний) во время работы насоса;
• Т7 = Т8 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода «К1» при индикации отказа насоса.
62
Уставки 2-го насоса:
• Т13 = 30 сек – время, в течение которого не анализируются показания датчика давления Д2
при запуске двигателя;
• Т15 = Т16 = 2 сек – время, в течение которого допускается кратковременное замыкание и
размыкание контактов датчика давления («провалы» показаний) во время работы прибора;
• Т19 = Т20 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода «К2» при индикации отказа насоса.
Уставки 3-го насоса:
• Т25 = 30 сек – время, в течение которого не анализируются показания датчика давления Д3
при запуске двигателя;
• Т27 = Т28 = 2 сек – время, в течение которого допускается кратковременное замыкание и
размыкание контактов датчика давления («провалы» показаний) во время работы насоса;
• Т35 = Т36 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода «К3» при индикации отказа насоса.
Уставки, общие для прибора:
• Т31 = Т32 = 30 сек – длительность периодов работы насосов;
• Т33 = Т34 = 2Т31 – задержки, необходимые для обеспечения правильной работы алгоритма
прибора;
• Т9 = 5 сек – время, в течение которого происходит задержка включения 1-го насоса после
включения 2-го;
• Т2 = Т14 = Т26 = 0, поскольку в работе данного алгоритма не используются.

63
7.8 Настройка алгоритма 15
На рисунке ниже показано положение перемычек
Вх1
,
Вх2
и
Вх3
, требуемое для данного
алгоритма.
Рисунок 7.9
Уставки задержек и их значения, установленные в приборе по умолчанию, приведены ниже.
Уставки 1-го насоса:
• Т1 = 30 сек – время, в течение которого при запуске двигателя насоса в данном канале не
анализируются показания датчика давления;
• Т3 = Т4 = 2 сек – время, в течение которого при работе двигателя насоса в данном канале
допускаются «провалы» показаний датчика давления;
64
• Т7 = Т8 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода насоса при индикации отказа его двигателя.
Уставки 2-го насоса:
• Т13 = 30 сек – время, в течение которого при запуске двигателя насоса в данном канале не
анализируются показания датчика давления;
• Т15 = Т16 = 2 сек – время, в течение которого при работе двигателя насоса в данном канале
допускаются «провалы» показаний датчика давления;
• Т19 = Т20 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода насоса при индикации отказа его двигателя.
Уставки, общие для прибора:
• Т25 = 45 сек, Т26 = 50 сек – интервалы времени работы насосов первого и второго каналов;
для реальной работы должны иметь значения, например, 24 и 24 часа.
7.9 Настройка алгоритма 16
На рисунке ниже показано положение перемычек
Вх1
,
Вх2
,
Вх3
и
Вх4
, требуемое для данного
алгоритма.

65
Рисунок 7.10
Уставки задержек и их значения, установленные в приборе по умолчанию, приведены ниже.
Уставки 1-го насоса:
• Т1 = 30 сек – время, в течение которого при запуске двигателя насоса в данном канале не
анализируются показания датчика давления;
• Т3 = Т4 = 2 сек – интервал времени, в течение которого при работе двигателя насоса в
данном канале допускаются «провалы» показаний датчика давления;
• Т7 = Т8 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода насоса при индикации отказа его двигателя.
66
Уставки 2-го насоса:
• Т13 = 30 сек – время, в течение которого при запуске двигателя насоса в данном канале не
анализируются показания датчика давления;
• Т15 = Т16 = 2 сек – время, в течение которого при работе двигателя насоса в данном канале
допускаются «провалы» показаний датчика давления;
• Т19 = Т20 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода насоса при индикации отказа его двигателя.
Уставки, общие для прибора:
• для правильного выполнения алгоритма должны быть установлены значения Т27 = 1 сек,
• Т28 = 0 сек.
7.10 Настройка алгоритма 17
Положение перемычек такое же
, как в настройке алгоритма 06.
Уставки задержек и их значения, установленные в приборе по умолчанию, приведены ниже.
Уставки 1-го насоса:
• Т1 = 10 сек – время, в течение которого не контролируется состояние датчика давления при
включении насоса;
• Т3 = Т4 = 2 сек – время, в течение которого допускается кратковременное размыкание
(замыкание) контактов датчиков давления во время работы насоса;
• Т7 = Т8 = 1 сек – длительность периодов включенного и выключенного состояния
светодиода насоса при индикации отказа данного насоса;
• Т9 = … = Т12 = 0, поскольку при работе данного алгоритма они не используются.
67
Уставки 2-го насоса:
• Т13 = 10 сек – время, в течение которого не контролируется состояние датчика давления
при включении насоса;
• Т15 = Т16 = 2 сек – время, в течение которого допускается размыкание контактов датчика
давления во время работы насоса;
• Т19 = Т20 = 1 сек – длительность периодов включенного и выключенного состояния
светодиода насоса при индикации отказа данного насоса;
• Т21 = … = Т24 = 0, поскольку при работе данного алгоритма они не используются.
Уставки 3-го насоса:
• Т25 = 10 сек – время, в течение которого не контролируется состояние датчика давления
при включении насоса;
• Т27 = Т28 = 2 сек – время, в течение которого допускается размыкание контактов датчика
давления во время работы насоса;
• Т29 – время, в течение которого задерживается сигнал блокировки при отказе 3-го насоса;
необходимо для обеспечения правильной работы алгоритма прибора;
ВНИМАНИЕ
Задержку Т29 пользователю изменять категорически не рекомендуется!
• Т35 = Т36 = 1 сек – длительность периодов включенного и выключенного состояний
светодиода насоса при индикации отказа данного насоса.
Уставки, общие для прибора:
• Т31 = Т32 = 30 сек – длительность периодов работы насосов;
68
ПРИМЕЧАНИЕ
Обычно Т31 = 12 … 24 часа.
• Т33 = Т34 = 2Т31 – задержки, необходимые для обеспечения правильной работы алгоритма
прибора.
7.11 Настройка алгоритма 18
Уставки задержек и их значения, установленные в приборе по умолчанию, приведены ниже.
Уставки 1-го насоса:
• Т1 = 30 сек – время, в течение которого допускается незаливание электродов датчика Д4
при работе данного насоса (время на разгон насоса и заполнение емкости);
• Т3 = Т15 = 5 сек – время, в течение которого допускается кратковременное замыкание
(размыкание) контактов датчика Д4 («антидребезг») при работе данного насоса.
Уставки 2-го насоса:
• Т13 = 30 сек – время, в течение которого допускается незаливание электродов датчика Д4
при работе данного насоса (время на разгон насоса и заполнение емкости);
• Т4 = Т16 = 5 сек – время, в течение которого допускается кратковременное замыкание
(размыкание) контактов датчика Д4 («антидребезг») при работе данного насоса.
Уставки, общие для прибора:
• Т0 = 16 сек – время от момента включения питания прибора до начала выполнения
алгоритма; начать выполнять алгоритм до окончания задержки можно нажатием кнопки
ПРОГ.

69
• Т25 = 35 сек – время от момента заливания датчика Д2 верхнего уровня до включения
насоса (столь малое значение используется для проверки функционирования прибора
перед монтажом на насосную установку;
Значения остальных задержек изменять не рекомендуется.
Во избежание поляризации датчиков и, вследствие этого, резкого снижения их чувствительности
датчики запитываются от прибора переменным напряжением. Для правильной работы прибора
на переменном токе необходимо на коммутационной плате прибора установить перемычки
3
для
всех входов (
Вх1
,
Вх2
,
Вх3
и
Вх4
).
7.12 Настройка алгоритма 20
На рисунке ниже указано положение перемычек
Вх1
,
Вх2
,
Вх3
и
Вх4
.
Рисунок 7.11
70
Уставки задержек и их значения, установленные в приборе по умолчанию, приведены ниже.
• Т1= 5 cек – время, в течение которого не происходит замыкания реле 1 при смачивании
датчика «сухого хода»;
• T2= 5 cек – время, в течение которого допускается осушение электродов датчика «сухого
хода» при работе насоса;
• Т25= 5 сек – время от момента заливания датчика аварийного перелива до замыкания реле
3;
• Т26= 5 сек – время от момента осушения датчика аварийного перелива до размыкания реле
3.
7.13 Копирование алгоритмов
7.13.1 Общие сведения
После включения прибора в одном из режимов программирования (режимы с 1 по 3) на четырех
красных светодиодах 1, 2, 3, 4 в течение 2 сек индицируется номер режима. Затем прибор
начинает работу в соответствующем режиме.
7.13.2 Копирование алгоритма из одного прибора в другой
Для копирования алгоритма из одного прибора в другой следует выполнить следующие
действия:
1. Отсоединить плату индикации программируемого прибора от платы питания.
2. Соедините платы специальным кабелем № 1, как показано на рисунке ниже.

71
Рисунок 7.12
ВНИМАНИЕ
Соединение производить только при выключенном питании приборов.
3. Подать питание на эталонный прибор.

72
На 1 сек засветится светодиод 1 , индицируя номер режима , после чего оба прибора
готовы к приему алгоритма, о чем свидетельствует светящийся светодиод
АВТ
(см. рисунок
ниже).
Рисунок 7.13
4. Нажатием на кнопку
переведите образцовый прибор в режим передачи. При этом на
нем загорится светодиод
РУЧ
(см. рисунок ниже).

73
Рисунок 7.14
5. На принимающем приборе нажать кнопку
(см. рисунок ниже), чтобы перевести прибор
в режим ожидания приема. Режим индицируется поочередным миганием светодиодов
К1
и
К3
. Затем нажать кнопку
. После этого загорится светодиод
К3
.

74
Рисунок 7.15
6. На передающем приборе нажать кнопку
, чтобы перевести прибор в режим начала
передачи. В течение четырех секунд на передающем приборе будут непрерывно гореть
светодиоды
К1
,
К2
и
К3
после чего начнется передача, сопровождаемая одновременным
миганием светодиодов
К1
,
К2
и
К3
(см. рисунок ниже).

75
Рисунок 7.16
После передачи каждого блока данных синхронно мигают светодиоды
К1
,
К2
и
К3
на обоих
приборах (см. рисунок ниже).
Рисунок 7.17

76
7. После успешного окончания передачи прекратится мигание светодиодов
К1
,
К2
,
К3
(см.
рисунок ниже).
Рисунок 7.18
8. Если после окончания передачи светодиоды
К1
,
К2
и
К3
принимающего прибора мигают по
очереди (см. рисунки ниже), операцию записи алгоритма необходимо повторить.
Рисунок 7.19

77
7.13.3 Копирование алгоритма из компьютера в прибор
Для копирования алгоритма из компьютера в прибор следует выполнить следующие действия:
1. Соедините параллельный порт компьютера с прибором специальным кабелем №2, как
показано на рисунок ниже.
Рисунок 7.20

78
ВНИМАНИЕ
Соединение производить только при выключенном питании прибора и
компьютера.
2. Подать питание на прибор и включить компьютер (рисунок ниже).
Рисунок 7.21
На четырех красных светодиодах 1, 2, 3, 4 САУ-МП в течение 2 сек индицируется номер
режима, после чего прибор становится в режим приема алгоритма, о чем свидетельствует
светящийся светодиод
АВТ
(рисунок ниже).

79
Рисунок 7.22
3. Запустить на компьютере программу загрузки алгоритмов для САУ-МП. Пользуясь
инструкцией к программе выбрить из меню нужный алгоритм (рисунок ниже).
Рисунок 7.23

80
4. На принимающем приборе нажмите кнопку К2, чтобы перевести его в режим ожидания
приема, который индицируется поочередным миганием светодиодов К1 и К3
(рисунок ниже).
Рисунок 7.24
5. Нажать кнопку Прог (см. рисунок ниже). После этого дайте компьютеру команду передачи
данных.
Рисунок 7.25

81
По мере поступления очередного блока данных синхронно мигают светодиоды К1, К2 и К3
(рисунок ниже).
Рисунок 7.26
6. После успешного окончания передачи прекратится мигание светодиодов К1, К2 и К3 (см.
рисунок ниже).
Рисунок 7.27

82
7. Если после окончания передачи светодиоды К1, К2 и К3 принимающего прибора мигают по
очереди (см. рисунок ниже), операцию записи алгоритма необходимо повторить.
Рисунок 7.28
В случае успешного окончания процесса снимите питание с прибора и отсоедините кабель
от разъема Х2.
7.14 Изменение уставок таймеров
Для изменения уставок таймеров проделать следующие действия:
1. Установить на коммутационном поле Х2 платы индикации перемычки в положение 2 и 8

83
Рисунок 7.29
2. Подать питание на прибор. На четырех красных светодиодах 1, 2, 3, 4 в течение 2 сек
индицируется номер режима, после чего на индикаторах прибора отображается текущее
значение уставки Т0.
3. Для выбора уставки нажать и удерживать кнопку K1. На светодиодах отобразится номер
уставки в двоичном коде. При удержании кнопки K1 отображаемый код начнет
увеличиваться от 0 до 36. Если одновременно с кнопкой K1 нажать кнопку K2, то код начнет
уменьшаться.

84
Рисунок 7.30
В
приложении А
приводится таблица перевода десятичного кода в двоичный.
4. Отпустить кнопку в тот момент, когда на индикаторах будет высвечен номер нужной
уставки. После того как кнопка K1 будет отпущена, на индикаторах появится текущее
значение уставки в формате, показанном на рисунке ниже.

85
Рисунок 7.31
В двух старших разрядах кодируется единица измерения времени: секунда, минута, час
или сутки. В младших шести – количество этих единиц.
5. Для выбора единицы измерения времени нажать и удерживать кнопку ПРОГ – значение
старшего разряда начнет изменяться. Отпустите кнопку ПРОГ в тот момент, когда разряд
будет в нужном состоянии.
6. Для установки следующего разряда вновь нажать и удерживать кнопку ПРОГ.

86
Рисунок 7.32
7. Аналогично производится установка по очереди у всех разрядов выбранной уставки.
8. Для выбора следующей уставки нажать и удерживать кнопку К1.
9. После окончания установки снять питание с прибора и удалить все перемычки с
коммутационного поля Х2.
7.15 Изменение опорных напряжений входных компараторов
Для изменения опорных напряжений входных компараторов проделать операции:
1. Установить на коммутационном поле Х2 платы индикации перемычки в положение 3 и 8.

87
Рисунок 7.33 – Коммутационное поле
2. Подать питание на прибор. На четырех красных светодиодах 1, 2, 3, 4 в течение 2 сек
индицируется номер режима (
рисунок 7.2
, а, б), после чего на индикаторах отобразится
текущее значение опорного напряжения первого входного устройства и род тока,
обрабатываемого данным входом.
3. Если светодиод
РУЧ
мигает, ток переменный, если горит непрерывно, то постоянный (
рисунок 7.3
, б). Остальные восемь светодиодов в двоичном коде от 0 до 255 (К1 – младший
разряд) отображают в условных единицах значение напряжения, при котором срабатывает
входное устройство.

88
Рисунок 7.34 – Изменение опорного напряжения
Для выбора входного устройства нажать и удерживать кнопку К1. Светодиоды Входы 1, 2,
3, 4 начнут поочередно светиться. Отпустить кнопку в тот момент, когда загорится
светодиод. соответствующий выбранному входу – на индикаторах отобразится текущее
значение опорного напряжения.
Для изменения значения опорного напряжения нажать и удерживать кнопку ПРОГ –
значение старшего разряда начнет изменяться. Отпустить кнопку ПРОГ в тот момент, когда
разряд будет в нужном состоянии.
4. Для установки следующего разряда вновь нажать и удерживать кнопку ПРОГ.
Аналогично произвести по очереди установку всех разрядов.
5. Для выбора следующего входного устройства нажать и удерживать кнопку К1.
После окончания установки снять питание с прибора и удалить все перемычки с
коммутационного поля Х2.
Изменять задержки и пороги можно и с помощью компьютерной программы загрузки алгоритма.
89
8 Техническое обслуживание
8.1 Общие указания
При выполнении работ по техническому обслуживанию прибора следует соблюдать требования
безопасности, изложенные в
разделе 3
.
Техническое обслуживание прибора проводится не реже одного раза в 6 месяцев и включает
следующие процедуры:
• проверка крепления прибора;
• проверка винтовых соединений;
• удаление пыли и грязи с клеммника прибора.
Следует регулярно производить осмотр кондуктометрических зондов, используемых в качестве
датчиков уровня, и при необходимости осуществлять очистку рабочих частей их электродов от
налета, оказывающего изолирующее действие. Периодичность осмотра зависит от состава
рабочей жидкости и содержания в ней нерастворимых примесей.
При работе с активными датчиками периодически, но не реже одного раза в 6 месяцев следует
производить их осмотр, проверку качества крепления, а также очистку рабочих поверхностей от
пыли и грязи.
9 Маркировка
На корпус прибора нанесены:
• наименование прибора;
• степень защиты корпуса по ГОСТ 14254;
• напряжение и частота питания;

90
• потребляемая мощность;
• класс защиты от поражения электрическим током по ГОСТ 12.2.007.0;
• единый знак обращения продукции на рынке государств-членов Таможенного союза (ЕАС);
• страна-изготовитель;
• заводской номер прибора и год выпуска.
На потребительскую тару нанесены:
• наименование прибора;
• единый знак обращения продукции на рынке государств-членов Таможенного союза (ЕАС);
• страна-изготовитель;
• заводской номер прибора и год выпуска.
10 Упаковка
Упаковка прибора производится в соответствии с ГОСТ 23088-80 в потребительскую тару,
выполненную из коробочного картона по ГОСТ 7933-89.
Упаковка прибора при пересылке почтой производится по ГОСТ 9181-74.
11 Комплектность
Наименование
Количество
Прибор
1 шт.
Паспорт и Гарантийный талон
1 экз.
Руководство по эксплуатации
1 экз.
Комплект крепежных элементов
1 к-т.

91
Наименование
Количество
Кабель САУ-МП П-П (поставляется по отдельному заказу)
1 шт.
Кабель САУ-МП ПК-П (поставляется по отдельному заказу)
1 шт.
ПРИМЕЧАНИЕ
Изготовитель оставляет за собой право внесения дополнений в комплектность изделия.
12 Транспортирование и хранение
Прибор транспортируется в закрытом транспорте любого вида. Крепление тары в транспортных
средствах следует производить согласно правилам, действующим на соответствующих видах
транспорта.
Транспортирование и хранение приборов может осуществляться в транспортной таре при
температуре окружающего воздуха от минус 25 до плюс 75 ° С, с соблюдением мер защиты от
ударов и вибраций.
Перевозку следует осуществлять в транспортной таре поштучно или в контейнерах.
Условия хранения в таре на складе изготовителя и потребителя должны соответствовать
условиям 1 по ГОСТ 15150-69. В воздухе не должны присутствовать агрессивные примеси.
Прибор следует хранить на стеллажах.
13 Гарантийные обязательства
Изготовитель гарантирует соответствие прибора требованиям ТУ при соблюдении условий
эксплуатации, транспортирования, хранения и монтажа.
92
Гарантийный срок эксплуатации –
24 месяца
со дня продажи.
В случае выхода прибора из строя в течение гарантийного срока при соблюдении условий
эксплуатации, транспортирования, хранения и монтажа предприятие-изготовитель обязуется
осуществить его бесплатный ремонт или замену.
Порядок передачи прибора в ремонт содержится в паспорте и в гарантийном талоне.

93
Приложение А. Таблица перевода десятичного кода в
двоичный
0
00000000
64
01000000
128
10000000
192
11000000
1
00000001
65
01000001
129
10000001
193
11000001
2
00000010
66
01000010
130
10000010
194
11000010
3
00000011
67
01000011
131
10000011
195
11000011
4
00000100
68
01000100
132
10000100
196
11000100
5
00000101
69
01000101
133
10000101
197
11000101
6
00000110
70
01000110
134
10000110
198
11000110
7
00000111
71
01000111
135
10000111
199
11000111
8
00001000
72
01001000
136
10001000
200
11001000
9
00001001
73
01001001
137
10001001
201
11001001
10
00001010
74
01001010
138
10001010
202
11001010
11
00001011
75
01001011
139
10001011
203
11001011
12
00001100
76
01001100
140
10001100
204
11001100
13
00001101
77
01001101
141
10001101
205
11001101
14
00001110
78
01001110
142
10001110
206
11001110
15
00001111
79
01001111
143
10001111
207
11001111
16
00010000
80
01010000
144
10010000
208
11010000
17
00010001
81
01010001
145
10010001
209
11010001
18
00010010
82
01010010
146
10010010
210
11010010
19
00010011
83
01010011
147
10010011
211
11010011
20
00010100
84
01010100
148
10010100
212
11010100
21
00010101
85
01010101
149
10010101
213
11010101
22
00010110
86
01010110
150
10010110
214
11010110

94
23
00010111
87
01010111
151
10010111
215
11010111
24
00011000
88
01011000
152
10011000
216
11011000
25
00011001
89
01011001
153
10011001
217
11011001
26
00011010
90
01011010
154
10011010
218
11011010
27
00011011
91
01011011
155
10011011
219
11011011
28
00011100
92
01011100
156
10011100
220
11011100
29
00011101
93
01011101
157
10011101
221
11011101
30
00011110
94
01011110
158
10011110
222
11011110
31
00011111
95
01011111
159
10011111
223
11011111
32
00100000
96
01100000
160
10100000
224
11100000
33
00100001
97
01100001
161
10100001
225
11100001
34
00100010
98
01100010
162
10100010
226
11100010
35
00100011
99
01100011
163
10100011
227
11100011
36
00100100
100
01100100
164
10100100
228
11100100
37
00100101
101
01100101
165
10100101
229
11100101
38
00100110
102
01100110
166
10100110
230
11100110
39
00100111
103
01100111
167
10100111
231
11100111
40
00101000
104
01101000
168
10101000
232
11101000
41
00101001
105
01101001
169
10101001
233
11101001
42
00101010
106
01101010
170
10101010
234
11101010
43
00101011
107
01101011
171
10101011
235
11101011
44
00101100
108
01101100
172
10101100
236
11101100
45
00101101
109
01101101
173
10101101
237
11101101
46
00101110
110
01101110
174
10101110
238
11101110
47
00101111
111
01101111
175
10101111
239
11101111
48
00110000
112
01110000
176
10110000
240
11110000

95
49
00110001
113
01110001
177
10110001
241
11110001
50
00110010
114
01110010
178
10110010
242
11110010
51
00110011
115
01110011
179
10110011
243
11110011
52
00110100
116
01110100
180
10110100
244
11110100
53
00110101
117
01110101
181
10110101
245
11110101
54
00110110
118
01110110
182
10110110
246
11110110
55
00110111
119
01110111
183
10110111
247
11110111
56
00111000
120
01111000
184
10111000
248
11111000
57
00111001
121
01111001
185
10111001
249
11111001
58
00111010
122
01111010
186
10111010
250
11111010
59
00111011
123
01111011
187
10111011
251
11111011
60
00111100
124
01111100
188
10111100
252
11111100
61
00111101
125
01111101
189
10111101
253
11111101
62
00111110
126
01111110
190
10111110
254
11111110
63
00111111
127
01111111
191
10111111
255
11111111
Работа с устройством
Устройство ОВЕН САУ – МП может
работать в ручном (включен
светодиод «РУЧ» и мигает «АВТ») и
автоматическом (включен светодиод
«АВТ» и мигает «РУЧ») режимах управления
реле.
Если с платы индикации устройства
удалены все перемычки, то после подачи
питания 220 В 50 Гц оно переходит в режим
отсчета задержки начала выполнения
алгоритма, заданной в уставке Т0 = 16 с.
Этот режим индицируется синхронно
мигающими светодиодами «РУЧ» и «АВТ».
После окончания отсчета задержки или
кратковременного нажатия на кнопку
«ПРОГ» устройство переходит к выполнению
заданного алгоритма (автоматический
режим). При этом светодиод «АВТ» горит
непрерывно, а светодиод «РУЧ» мигает с
частотой 1 Гц.
Перевод устройства в режим ручного
управления осуществляется нажатием и
удержанием в течение 3 с кнопки «ПРОГ».
После перехода в этот режим светодиод
«РУЧ» горит непрерывно, а «АВТ» мигает
с частотой 1 Гц.
При работе в режиме ручного управления
возможно включение выходных реле прибора
при нажатии на одноименную кнопку «К1»,
«К2», «К3», или независимо от состояния
датчиков. Реакция на кнопку происходит
после ее отпускания. Длительность
нажатия должна быть не менее 2-х с.
Перевод прибора в режим автоматического
управления производится повторным
нажатием кнопки «ПРОГ».
Контроль за состоянием входов
осуществляется по светодиодам «ВХОДЫ
1, 2, 3, 4», а за состоянием выходов по
светодиодам «К1», «К2» и «К3».
При выполнении работ по техническому
обслуживанию следует соблюдать меры
безопасности. Периодически, но не реже
одного раза в 6 месяцев производить
осмотр устройства. При осмотре
контролировать:
– качество крепления устройства;
– отсутствие на приборе и клеммнике
пыли, грязи, а также посторонних предметов;
– качество подключения внешних связей.
Обнаруженные при осмотре недостатки
устранять.
При использовании в качестве датчиков
уровня кондуктометрических зондов
осуществлять их регулярный осмотр и
очистку рабочих частей электродов от
изолирующих налетов, шлаков и т.п.
Периодичность осмотра зависит от состава
рабочей жидкости и количества в ней
нерастворимых примесей. При работе с
активными датчиками периодически, но
не реже одного раза в 6 месяцев производить
их осмотр, проверку качества крепления,
а также очистку рабочих поверхностей
от пыли и грязи.
Схема подключения устройства ОВЕН
САУ – МП для настенного крепления
приведена на рис. 5.13.
Рис. 5.13. Схема подключения устройства
ОВЕН САУ – МП
Методика записи и копирования алгоритмов, изменения опорных напряжений входных компараторов и уставок таймеров
После включения устройства в одном из
режимов программирования (режимы с 1 по
3) на четырех красных светодиодах «1»,
«2», «3», «4» в течение 2 с индицируется
номер режима. Затем устройство начинает
работу в соответствующем режиме.
Режим 1. Копирование алгоритма из одного устройства в другое
Отсоединить плату индикации программируемого
устройства от платы питания. Соединить
платы специальным кабелем № 1.
Внимание! Соединение производить
только при выключенном питании устройств.
Подать питание на «образцовое» устройство.
На 1 с загорится светодиод «1» , индицируя
номер режима, после чего оба устройства
готовы к приему алгоритма, о чем
свидетельствует горящий светодиод
«АВТ» (рис. 5.14).
Кнопкой «К1»переведите «образцовое»
устройство в режим передачи. При этом
на нем загорится светодиод «РУЧ» (рис.
5.15).
На принимающем устройстве нажать кнопку
«К2» (рис. 5.16), чтобы перевести устройство
в режим ожидания приема. Режим индицируется
поочередным миганием светодиодов «»К1»
и «К3». Затем нажмите кнопку «ПРОГ».
После этого загорится светодиод «К3».
На передающем устройстве нажмите кнопку
«К2», чтобы перевести устройство в режим
начала передачи. В течение 4-х с на
передающем устройстве будут непрерывно
гореть светодиоды «К1», «К2» и «К3» после
чего начнется передача, сопровождаемая
одновременным миганием светодиодов
«К1», «К2» и «К3» (рис. 5.17).
Рис. 5.14. Состояния устройств ОВЕН САУ
– МП при копировании алгоритмов
управления
Рис. 5.15. Подготовка устройства ОВЕН
САУ – МП к передаче данных
Рис. 5.16. Состояние принимающего устройства
ОВЕН САУ – МП
Рис. 5.17. Режим передачи данных в устройствах
ОВЕН САУ – МП
После передачи каждого блока данных
синхронно мигают светодиоды «К1», «К2»
и «К3» на обоих устройствах. После
успешного окончания передачи прекратится
мигание этих светодиодов.
Если после окончания передачи светодиоды
«К1», «К2» и «К3» принимающего устройства
мигают по очереди (рис. 5.18), то операцию
записи алгоритма необходимо повторить.
Копирование алгоритма
из компьютера в устройство
ОВЕН САУ–МП
Соедините параллельный порт компьютера
с устройством специальным кабелем №2.
Внимание! Соединение производить
только при выключенном питании устройства
и компьютера.
Подать питание на устройство и включить
компьютер. На четырех красных светодиодах
«1», «2», «3», «4» устройства ОВЕН САУ –
МП в течение 2 с показывается номер
режима, после чего устройство становится
в режим приема алгоритма, о чем
свидетельствует горящий светодиод
«АВТ» (рис. 5.19).
Рис. 5.18. Индикация режима сбоя при
передаче данных
Рис. 5.19. Установка режима приема алгоритма
устройства ОВЕН САУ – МП
Запустить на компьютере программу
загрузки алгоритмов для устройства
ОВЕН САУ – МП. Пользуясь инструкцией
к программе, выбирать на экране компьютера
из меню нужный алгоритм управления. На
устройстве ОВЕН САУ – МП нажать
кнопку «К2», чтобы перевести его в режим
ожидания приема, который показывается
поочередным миганием светодиодов «К1»
и «К3».
Нажать кнопку «ПРОГ» устройства ОВЕН
САУ – МП. После этого дать компьютеру
команду передачи данных. По мере
поступления очередного блока данных
синхронно мигают светодиоды «К1», «К2»
и «К3».
После успешного окончания передачи
прекратится мигание светодиодов «К1»,
«К2» и «К3».
Если после окончания передачи светодиоды
«К1», «К2» и «К3» устройства ОВЕН САУ –
МП мигают по очереди (рис. 5.20), операцию
записи алгоритма необходимо повторить.
В случае успешного окончания процесса
снимите питание с устройства и отсоедините
кабель от разъема Х2.
Рис. 5.20. Режим сбоя при передаче алгоритма
в устройство ОВЕН САУ – МП
Соседние файлы в предмете [НЕСОРТИРОВАННОЕ]
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
- #
Контроллер уровня ОВЕН САУ-МП
Назначение контроллера уровня САУ-МП
Логический микропроцессорный контроллер САУ-МП предназначен для решения задач локальной автоматизации, связанных с применением релейных схем.
Применяется для управления подающими насосами в системах горячего и холодного водоснабжения, а также для поддержания уровня жидкости в резервуаре.
Прибор выпускается в корпусах 2-х типов: настенном (Н) и щитовом (Щ1).

Функциональные возможности контроллера уровня САУ-МП
Контроллер уровня САУ-МП имеет следующие возможности:
- БОЛЬШОЙ ВЫБОР ГОТОВЫХ АЛГОРИТМОВ работы (описание в руководстве по эксплуатации)
- КОНТРОЛЬ В 4 Х-ТОЧКАХ пороговых значений уровня, давления, температуры и других параметров
- ПОДКЛЮЧЕНИЕ ШИРОКОГО СПЕКТРА ДАТЧИКОВ
- УПРАВЛЕНИЕ ТРЕМЯ ИСПОЛНИТЕЛЬНЫМИ МЕХАНИЗМАМИ (например, насосами) по выбранному алгоритму
- РЕЖИМ РУЧНОГО УПРАВЛЕНИЯ
- ВСТРОЕННЫЕ ТАЙМЕРЫ для установки специальных временных параметров, а также набор других функциональных элементов (счетчики, триггеры и др.)
- ВОЗМОЖНОСТЬ ЗАДАНИЯ ВРЕМЕНИ ЗАДЕРЖКИ выполнения алгоритма
Приборы серии Овен САУ-МП позволяют эффективно управлять целой системой насосов.
Технические характеристики контроллера уровня САУ-МП
|
Номинальное напряжение питания прибора |
220 В частотой 50 Гц |
|
Допустимые отклонения номинального напряжения |
-15…+10 % |
|
Количество обслуживаемых насосов |
от 1 до 3 |
|
Диапазон установки временных параметров |
от 1 с до 63 суток |
|
Количество независимых входов |
4 |
|
Количество выходных э/м реле |
3 |
|
Макс. допустимый ток нагрузки, коммутируемый контактами встроенного реле |
8 А при 220 В 50 Гц (cos > 0,4) |
|
Габаритные размеры и степень защиты корпуса |
|
|
– настенный Н |
130х105х65 мм, IP44 |
|
– щитовой Щ1 |
96х96х70 мм, IP54 со стороны передней панели |
Условия эксплуатации контроллера уровня САУ-МП
|
Температура окружающего воздуха |
+5…+50 °С |
|
Атмосферное давление |
86…106,7 кПа |
|
Относительная влажность воздуха (при 35 °С и ниже без конденсации влаги) |
не более 80 % |
Модификации контроллера уровня САУ МП
Ниже приводится схема обозначения модификаций контроллеров серии САУ МП в различных корпусах.

Производятся следующие модификации контроллера Овен САУ МП: САУ-МП-Н.06, САУ-МП-Н.11, САУ-МП-Н.12, САУ-МП-Н.13, САУ-МП-Н.14, САУ-МП-Н.15, САУ-МП-Н.16, САУ-МП-Н.18, САУ-МП-Н.20, САУ-МП-Щ1.06, САУ-МП-Щ1.11, САУ-МП-Щ1.12, САУ-МП-Щ1.13, САУ-МП-Щ1.14, САУ-МП-Щ1.15, САУ-МП-Щ1.16, САУ-МП-Щ1.18, САУ-МП-Щ1.20.
САУ-МП-Х.06 для управления тремя независимыми насосами
САУ-МП-Х.06 предназначен для управления тремя независимыми насосами, каждый из которых поддерживает уровень жидкости в одной из трех емкостей по показаниям трех датчиков уровня (см. рисунок). Датчики уровня подключены ко входам 1…3 прибора.
Прибор может работать по двум типам логики – прямой и обратной. Логика задается единой для всех трех каналов.
При прямой логике насос включается при размыкании контактов датчика, т. е. насос начинает накачивать в бак жидкость тогда, когда ее уровень опустится ниже уровня контактов датчика.
При обратной логике насос включается при замыкании контактов датчика, т.е. насос начинает откачивать жидкость из емкости, когда ее уровень станет выше уровня контактов датчика.

САУ-МП-Х.11 для управления двумя циркуляционными насосами
САУ-МП-Х.11 предназначен для управления двумя циркуляционными насосами, поочередно работающими на одну магистраль, с возможностью аварийной сигнализации.
На магистрали установлен датчик давления («сухой контакт»), подключаемый к входу 4. Реле 1 и 2 осуществляют управление насосами. Если отказывают оба двигателя, на реле 3 выдается сигнал аварии, например, для подключения напрямую, без всякого контроля давления, аварийного двигателя. Вход 1 используется для перехода в автоматический режим работы и для сброса аварийного сигнала.

САУ-МП-Х.12 для управления двумя насосами
САУ-МП-Х.12 управляет двумя насосами, поочередно работающими на наполнение расходного бака.
На подающей трубе установлен датчик давления («сухой контакт»), подключаемый ко входу 4. Датчик верхнего уровня («короткий» электрод) подключается ко входу 2, а нижнего уровня («длинный» электрод) – ко входу 3.
Если уровень воды выше «короткого» электрода, насосы не работают, и так до тех пор, пока уровень не понизится ниже «длинного» электрода – включается один из насосов. Уровень воды в баке начинает повышаться, но двигатель продолжает работать до тех пор, пока вода не закроет «короткий» электрод. Двигатель выключается, а при следующем осушении длинного электрода включится двигатель другого насоса.

Доставка контроллера уровня САУ-МП для управления насосами
Купить контроллер уровня САУ-МП для управления несколькими насосами по выгодной цене в Ростове и городах Юга России можно в компании «Донские измерительные системы
Мы доставим контроллер САУ-МП в течении одного — двух дней в города: Таганрог, Новочеркасск, Азов, Шахты, Волгодонск, Сальск, Краснодар, Тихорецк, Тимашевск, Сочи, Новороссийск, Анапа, Туапсе, Геленджик, Ейск, Майкоп, Армавир, Волгоград, Элиста, Астрахань, Ставрополь, Невинномысск, Минеральные Воды, Кисловодск, Пятигорск, Железноводск, Черкесск, Нальчик, Владикавказ, Грозный, Махачкала по выгодной цене.
Пункты доставки контроллера уровня САУ-МП транспортной компанией «Деловые линии».
Мы доставим по выгодной цене контроллер САУ-МП для управления системой насосов до следующих пунктов выдачи: г. Таганрог , Чучева, 1 , г. Новочеркасск , Газетная, 21, г. Волгодонск , Прибрежная, 2а, г. Краснодар, А. Покрышкина, 2/4, г. Новороссийск , с. Цемдолина, Промышленная , 1, г. Сочи ,Краснодонская, 64, г. Пятигорск , Кисловодское, 48, г. Ставрополь, Кулакова, 28 б, г. Волгоград, Гумрак, Моторная, 9 а, г. Волжский , 2-й Индустриальный, 4 а, г. Севастополь , Фиолентовское, 1, Симферополь, Урожайная, 1, г. Астрахань, Энергетиков, 5а
Пункты доставки контроллера уровня САУ-МП курьерской компанией «СДЭК»
Мы доставим по выгодной цене контроллер уровня САУ-МП до следующих пунктов выдачи: г.Таганрог, Петровская, 42, г. Новочеркасск, площадь Левски, 5, г. Волгодонск, Морская, 76, г. Шахты, Советская, 200, г. Краснодар, Текстильная, 9, г. Армавир, Новороссийская, 2/4, г. Новороссийск, пр-т Ленина, 13, г. Сочи, Пластунская, 47 А, г. Георгиевск, Пушкина, 48, г. Ессентуки, Ермолова, 123, г. Кисловодск, Красивая, 30, г. Минеральные воды, 50 лет Октября, 67, г. Пятигорск, Московская, 68А, г. Ставрополь, 45 параллель, 31, г. Майкоп, Ленина, 6, г. Волжский, пр. Ленина 94, г. Махачкала, Буйнакского, 63, г. Хасавюрт, Аксаевское шоссе, 101, г. Нальчик, Темрюка Идарова, 129, г. Алушта, Таврическая, 3, г. Евпатория, Крупской, 60 А, г. Керчь, Советская, 15, г. Севастополь, Очаковцев, 34 А, г. Симферополь, Желябова, 44 А, г. Судак, Ленина, 78 Б, г. Ялта, Московская, 33, г. Владикавказ, Международная, 2, г. Грозный, Кадырова, 157, г. Астрахань, Богдана Хмельницкого, 44
САУ-МП Прибор для управления системой подающих насосов

Назначение
Логический микропроцессорный контроллер САУ-МП предназначен для решения задач локальной автоматизации, связанных с применением релейных схем.
Применяется для управления подающими насосами в системах горячего и холодного водоснабжения, а также для поддержания уровня жидкости в резервуаре.
Прибор выпускается в корпусах 2-х типов : настенном Н и щитовом Щ1.
Основные возможности прибора
- контроль в 4 х-точках пороговых значений уровня, давления, температуры и других параметров;
- подключение широкого спектра датчиков, например датчик уровня поплавковый и датчик уровня кондуктометрический;
- управление тремя исполнительными механизмами (например, насосами) по выбранному алгоритму;
- режим ручного управления;
- большой выбор готовых алгоритмов работы (описание в руководстве по эксплуатации);
- встроенные таймеры для установки специальных временных параметров, а также набор других функциональных элементов (счетчики, триггеры и др.);
- возможность задания времени задержки выполнения алгоритма.
Функциональная схема контроллера управления системой подающих насосов
ОВЕН САУ-МП содержит 4 входа для подключения датчиков, 4 устройства сравнения, выполненных на операционных усилителях, программируемую логическую матрицу (ПЛМ) для обработки данных, набор базовых элементов и три выходных электромагнитных реле.
Выходными устройствами САУ-МП являются три реле 8 А 220 В.
Входные сигналы
Ко входам САУ-МП можно подключать от одного до четырех датчиков с различными типами выходных сигналов:
- «сухие» контакты;
- открытый коллектор;
- аналоговые сигналы в виде токовой петли или постоянного напряжения в пределах 0…5 В, а также датчики:
- нелинейные резисторы (позисторы, термисторы);
- кондуктометрические датчики.
К разным входам могут быть подключены различные датчики.
Сигналом возбуждения для кондуктометрических датчиков, выполненных в виде погружных электродов, является переменное напряжение низкой частоты (25 Гц). Это позволяет избежать поляризации электродов, потери их чувствительности и значительно продлевает срок их службы.
Для питания датчиков в приборе установлен встроенный источник питания +12 В.
Устройства сравнения
За каждым из 4-х входов закреплено свое устройство сравнения (компаратор), для которого может быть задан свой порог срабатывания.
Компаратор сравнивает текущий аналоговый сигнал со входа со значением уставки и подает сигнал на ПЛМ, в соответствии с заданной логикой работы.
Программируемая логическая матрица (ПЛМ)
ПЛМ представляет собой программируемую логическую структуру, формируемую при помощи специального программного пакета, разработанного на платформе Windows 95, 98.
Помимо ПЛМ прибор имеет набор базовых элементов:
- перезапускаемый таймер;
- RS-триггер;
- триггер тактовой частоты;
- счетчик-делитель;
- счетчик;
- генератор со встроенным RS-фиксатором;
- накопитель временных сигналов;
- компаратор временных сигналов.
Алгоритмы работы САУ-МП
Разработка алгоритма осуществляется на ЭВМ, а затем записывается в прибор с помощью специального кабеля. Алгоритм, записанный в память прибора, выбирается пользователем при заказе. Также возможно копирование алгоритмов из одного прибора в другой при помощи специального кабеля.
В настоящее время разработано 8 алгоритмов работы САУ-МП, которым соответствуют следующие модификации прибора:
— САУ-МП-Х.06;
— САУ-МП-Х.11;
— САУ-МП-Х.12;
— САУ-МП-Х.13;
— САУ-МП-Х.14;
— САУ-МП-Х.15;
— САУ-МП-Х.16;
— САУ-МП-Х.17.
Для всех модификаций при пуске двигателя насоса показания датчика давления не контролируются в течение определенного времени (30 с по умолчанию), которое требуется на разгон и появление давления в трубе.
Технические характеристики САУ-МП
| Параметр | Значение |
| Номинальное напряжение питания прибора | 220 В частотой 50 Гц |
| Допустимые отклонения номинального напряжения | -15…+10 % |
| Количество обслуживаемых насосов | от 1 до 3 |
| Диапазон установки временных параметров | от 1 с до 63 суток |
| Количество независимых входов | 4 |
| Количество выходных э/м реле | 3 |
| Макс. допустимый ток нагрузки, коммутируемый контактами встроенного реле | 8 А при 220 В 50 Гц (cos > 0,4) |
| Габаритные размеры и степень защиты корпуса | |
| — настенный Н | 130×105×65 мм, IP44 |
| — щитовой Щ1 | 96×96×70 мм, IP54 со стороны передней панели |
| Условия эксплуатации | |
| Температура окружающего воздуха | +5…+50 °С |
| Атмосферное давление | 86…106,7 кПа |
| Относительная влажность воздуха (при 35 °С и ниже без конденсации влаги) | не более 80 % |
Модификации САУ-МП по алгоритму работы
САУ-МП-Х.06
САУ-МП-Х.06 предназначен для управления тремя независимыми насосами, каждый из которых поддерживает уровень жидкости в одной из трех емкостей по показаниям трех датчиков уровня (см. рисунок). Датчики уровня подключены ко входам 1…3 прибора.
Прибор может работать по двум типам логики — прямой и обратной. Логика задается единой для всех трех каналов.
При прямой логике насос включается при размыкании контактов датчика, т. е. насос начинает накачивать в бак жидкость тогда, когда ее уровень опустится ниже уровня контактов датчика.
При обратной логике насос включается при замыкании контактов датчика, т.е. насос начинает откачивать жидкость из емкости, когда ее уровень станет выше уровня контактов датчика.
САУ-МП-Х.11
САУ-МП-Х.11 предназначен для управления двумя циркуляционными насосами, поочередно работающими на одну магистраль, с возможностью аварийной сигнализации.
На магистрали установлен датчик давления («сухой контакт»), подключаемый к входу 4. Реле 1 и 2 осуществляют управление насосами. Если отказывают оба двигателя, на реле 3 выдается сигнал аварии, например, для подключения напрямую, без всякого контроля давления, аварийного двигателя. Вход 1 используется для перехода в автоматический режим работы и для сброса аварийного сигнала.
САУ-МП-Х.12
САУ-МП-Х.12 управляет двумя насосами, поочередно работающими на наполнение расходного бака.
На подающей трубе установлен датчик давления («сухой контакт»), подключаемый ко входу 4. Датчик верхнего уровня («короткий» электрод) подключается ко входу 2, а нижнего уровня («длинный» электрод) — ко входу 3.
Если уровень воды выше «короткого» электрода, насосы не работают, и так до тех пор, пока уровень не понизится ниже «длинного» электрода — включается один из насосов. Уровень воды в баке начинает повышаться, но двигатель продолжает работать до тех пор, пока вода не закроет «короткий» электрод. Двигатель выключается, а при следующем осушении длинного электрода включится двигатель другого насоса.
САУ-МП-Х.13
Модификация САУ-МП-Х.13 является аналогом САУ-МП-Х.11. Отличие заключается в том, что на реле 3 при включении двигателя насоса предварительно выдается сигнал переключения обмоток двигателя на пусковой режим («треугольник—звезда»), и лишь по истечении заданного времени включается двигатель. Аварийная сигнализация отсутствует.
САУ-МП-Х.14
САУ-МП-Х.14 («Вальс») предназначен для управления установкой из трех циркуляционных насосов, работающих на одну магистраль. На каждом из насосов установлен свой собственный датчик давления (подключаются к входам 1-3).
Насосы работают поочередно парами 1-2,1-3,2-3,1-2….
Если один из насосов отказал, то постоянно работает оставшаяся пара насосов. При включении прибора, когда должны одновременно запускаться насосы первого и второго каналов, во избежание большой нагрузки на сеть пусковыми токами двух двигателей, включение второго канала происходит с некоторым запаздыванием. Аварийная сигнализация отсутствует.
САУ-МП-Х.15
САУ-МП-Х.15 также, как и САУ-МП-Х.11, предназначен для управления основным и резервным насосом и имеет возможность аварийной сигнализации. Отличие состоит в работе реле 3, которое выдает сигнал аварии при отказе любого из двух насосов, при этом включается насос, находившийся в выключенном состоянии.
Если в процессе дальнейшей работы произошел отказ и второго насоса, о его аварии сигнализирует мигание соответствующего светодиода.
САУ-МП-Х.16
Работа САУ-МП-Х.16 аналогична САУ-МП-Х.12, но прибор этой модификации управляет работой двух насосов, работающих на осушение расходного бака. Если уровень воды выше датчика верхнего уровня, включается один из насосов (реле 1) и работает до осушения датчика нижнего уровня. В следующий раз при заливании «короткого» электрода осушать емкость будет второй насос (реле 2). Реле 3 используется для сигнализации об аварии.
САУ-МП-Х.17
Модификация САУ-МП-Х.17 аналогична САУ-МП-Х.14, предназначена для управления насосной установкой, содержащей три подающих насоса, которые включаются поочередно и работают на одну общую магистраль, при этом каждый насос имеет свой собственный датчик давления, замыкание контактов которого свидетельствует о нормальной работе насоса.
В автоматическом режиме одновременно работает только один насос, по истечении заданного времени работы насоса происходит его выключение и включение следующего насоса в порядке: 1-й —2-й —3-й —1-й —2-й.
Если один из насосов отказал, то поочередно работают оставшиеся насосы. При выходе из строя еще одного насоса продолжает работать последний исправный насос, не выключаясь.
САУ-МП-Х.18
САУ-МП-Х.18 управляет двумя насосами (основным и резервным), работающими на осушение емкости. Датчик верхнего уровня подключается ко входу 3 прибора, нижнего уровня — ко входу 2. Работа насосов осуществляется аналогично алгоритму САУ-МП-Х.12, но для контроля исправности насосов служит контрольная емкость. В ней установлен датчик уровня, подключенный ко входу 4. Вход 1 используется для блокировки работы насосов, реле 3 — для сигнализации об аварии.
САУ-МП-Х.20
САУ-МП-Х.20 предназначен для поддержания (долива) уровня жидкости в емкости, а также для сигнализации о переполнении и защиты насоса от «сухого хода».
В емкости устанавливается пятиэлектродный кондуктометрический датчик. Ко входу 1 подключается электрод «сухого хода», ко входам 2 и 3 — датчики нижнего и верхнего рабочих уровней, ко входу 4 — электрод перелива. Пятый электрод осуществляет функцию общего.
Система работает на долив от нижнего до верхнего рабочего уровня. Включение насоса осуществляет реле 2 в зависимости от уровня жидкости в емкости. Реле 1 прибора обеспечивает защиту насоса от «сухого хода». Реле 3 используется для сигнализации о переливе.
Для предотвращения преждевременного срабатывания защиты от «сухого хода» и от перелива введены задержки включения/отключения реле при смачивании/осушении соответствующих электродов.
Прибор для управления системой подающих насосов САУ-МП, сау мп, сау-м-п, сау м п

САУ-МП-Н.16 Прибор для управления системой подающих насосов
- Доступность: Снят с производства
Категории:
Для управления насосами
- Описание
- Характеристики
- Документация и материалы
Вместо САУ-МП рекомендуется использовать его усовершенствованный аналог — универсальный прибор для управления насосами САУ-У.
Назначение
Логический микропроцессорный контроллер САУ-МП предназначен для решения задач локальной автоматизации, связанных с применением релейных схем.
Применяется для управления подающими насосами в системах горячего и холодного водоснабжения, а также для поддержания уровня жидкости в резервуаре.
Прибор выпускается в корпусах 2-х типов: настенном (Н) и щитовом (Щ1).
Функциональные возможности
- Большой выбор готовых алгоритмов работы
- Контроль в 4 х-точках пороговых значений уровня, давления, температуры и других параметров
- Подключение широкого спектра датчиков
- Управление тремя исполнительными механизмами (например, насосами) по выбранному алгоритму
- Режим ручного управления
- Встроенные таймеры для установки специальных временных параметров, а также набор других функциональных элементов (счетчики, триггеры и др.)
- Возможность задания времени задержки выполнения алгоритма
Характеристики
|
Номинальное напряжение питания прибора |
220 В частотой 50 Гц |
|
Допустимые отклонения номинального напряжения |
-15…+10 % |
|
Количество обслуживаемых насосов |
от 1 до 3 |
|
Диапазон установки временных параметров |
от 1 с до 63 суток |
|
Количество независимых входов |
4 |
|
Количество выходных э/м реле |
3 |
|
Макс. допустимый ток нагрузки, коммутируемый контактами встроенного реле |
8 А при 220 В 50 Гц (cos > 0,4) |
|
Габаритные размеры и степень защиты корпуса |
|
|
– настенный Н |
130×105×65 мм, IP44 |
|
– щитовой Щ1 |
96×96×70 мм, IP54 со стороны передней панели |
Условия эксплуатации
|
Температура окружающего воздуха |
+5…+50 °С |
|
Атмосферное давление |
86…106,7 кПа |
|
Относительная влажность воздуха (при 35 °С и ниже без конденсации влаги) |
не более 80 % |