
Omron 50 de oy sigma II. Какая функция нужна , что прописать, чтобы он работал от отдельных кнопок. Сбросились настройки , раньше все работало с панели управления
Дмитрий Д 29.08.2023
Добрый день!
Необходимо сбросить результат идентификации опции в параметре Fn014.
Подробную инструкцию отправил на почту.
Андреев Юрий, support@driveka.ru 06.06.2022
Добрый день. Подскажите пожалуйста как отключить блок NS100. При физическом отключении выкидывает ошибку A.E7
Александр 06.06.2022
Добрый день!
Состояние bb- base block означает, что не приходит сигнал разрешения работы. Скорее всего, у Вас не совпадает позиция в которую контроллер перемещает ось со значением, которое контроллер получает от внешнего энкодера или с самого преобразователя. Необходимо проверить обратную связь, которая приходит на контроллер.
Андреев Юрий, support@driveka.ru 29.04.2021
добрый день!
подскажите, на omron sgdh-15 de-oy горит лампочка зарядки красным светом, первое окно 2горизонтали с точкой,второе окно-точка,третье-пусто, четвертое 6 и пятое 6. двигатель проходит пол оборота и стопориться с этой индикацией.
Станок пишет ошибку инкодера, но кабель и инкодер целые.
В чем загвоздка?
С уважением, Скрипник Константин 28.04.2021
Добрый день!
К сожалению, по запчастям поддержку оказать не сможем.
support@driveka.ru, Юрий Андреев 09.09.2020
Здравствуйте , подскажите меняем энкодер на модели :SGDH-15DE-OY, мотор SGMGH-13DCA6F-OY появляется ошибка при включении А05 , старый энкодер был UTSIH-B-17CK наклейка внутри B17001B00415 , а на новом B17001A35315 его можно это можно как то обойти без покупки нового энкодера ?
DENIS 09.09.2020
Здравствуйте!
SGDH-50DE с NS100. Как правильно убрать NS100 что бы работал от 10 В. Другой без модуля подключаю — работает. Этот с модулем уходит в блокировку, а без него — A.E7, что в принципе правильно. Pn800 вообще не высвечиваются.
Герман 03.09.2020
Добрый день!
Ошибка A.F6 переводится: не подключен двигатель к преобразователю. Проверьте подключение силового кабеля к преобразователю и двигателю, если с подключением всё в порядке, то проблема в самом преобразователе.
support@driveka.ru, Юрий Андреев 06.07.2020
Здравствуйте.
На SGDH-10AE периодически выпадает ошибка А.F6, сбросить невозможно, только выключив питание. В мануале такой ошибки нет. Подскажите, что она означает и как с ней бороться. Спасибо.
Также нужна стоимость и сроки поставки нового такого привода.
Андрей Павлов 06.07.2020
здравствуйте. имеем фрезерный станок с такими сервоприводами sgdm 10ada. с проблемой очень медленной работы оси x и y работает от nc studia частота платы 47кгц. ранее установка работата с пульта управления 160кгц. реально ли изменив настройки sgdm 10ada увеличить скорость. мануал не помог. изменив параметра Pn100 приводит к гулу двигателей не изменяя скорости вообще…
Сергей 10.03.2020
Добрый день!
Ответ отправил письмом, подробное описание всех символов есть в разделе Digital operator.
support@driveka.ru, Юрий Андреев 09.12.2019
Добрый день.
Что обозначает в первом 7-сегментном индикаторе горит верхний горизонтальный сегмент, средний и точка, во втором ничего не горит в третьем 0 в четвертом 3 в пятом 0 модель SGDV-120A01A002000
Эдуард Ильич 08.12.2019
Здравствуйте.
На сервоприводе SERVOPACK SGDH — 08AE-S-OY одной из осей впадает ошибка E5 нашёл её описание: Watchdog Timer Error MECHATROLINK synchronization.
Оси управляются по сети MECHATROLINK 2. Ошибка сбрасывается кнопками на лицевой панели, но привод не отвечает, не управляется даже в ручном режиме.
Меняя адрес с 2 на 3 этот привод управляется, а соседний , у которого позаимствовали адрес 3 и присвоили ему адрес 2 — встал с ошибкой E5.
Виктор Дрёмин 22.11.2019
Добрый день!
Это ошибка обмена данными между преобразователем и энкодером на валу двигателя. Как правило, причина возникновения в повреждении кабеля энкодера или самого энкодера. Проверьте заземление всех элементов.
support@driveka.ru, Юрий Андреев 12.03.2019
Добрый день. Подскажите пожалуйста, при запуске высвечивается ошибка ac9. Что она значит и как её исправить
Дмитрий 11.03.2019
Добрый день. Модель SGDH30DE/ В процессе работы отключается по ошибке А32. Но в конфигурации нет резистора регенерации и работал более2 лет.
Какие параметры частотника могут влиять на сглаживание влияния режима регенерации.
Эд 26.07.2018
Добрый день!
Эта ошибка означает: ошибка при проверке сенсора абсолютного датчика углового перемещения (внутренняя ошибка кодирующего устройства). В реальности возникает и с инкрементальными энкодерами при повреждении датчика, очень больших наводках на сигнальный кабель или повреждении кабеля энкодера. Рекомендуем проверить заземление всех элементов.
Андреев Юрий, support@driveka.ru 16.04.2018
Здравствуйте.
sgdh-08ae-s-oy
Ошибка А84.
Не могу найти расшифровку.
Михаил 14.04.2018
Добрый день!
Эта ошибка означает: пониженное напряжение на шине постоянного тока. Данная ошибка возникает при пониженном напряжении питания силовых цепей, повреждении конденсаторов в цепи постоянного тока или повреждении выпрямительного моста. Прежде всего, проверьте питающее напряжение. Описание ошибок можно посмотреть в руководстве по эксплуатации, раздел файлы для загрузки.
Андреев Юрий, support@driveka.ru 01.03.2018
Добрый день. при включении преобразователя SGDH-15DE-OY загорается ошибка А41 что это значит и где найти коды ошибок данного преобразователя
Осадчий 01.03.2018
Добрый день!
Это ошибка рекуперативного резистора, возможно, он повреждён или обладает недостаточной мощностью для рассеивания энергии торможения.
Список ошибок отправил Вам на электронную почту.
Андреев Юрий, support@driveka.ru 09.10.2017
Добрый день! Неподскажите где можно найти список ошибок на SGDH-30DE-OY Работает какое то время, потом отключается и выдает ошибку А 32
я 08.10.2017
Леонид, здравствуйте.
В руководстве
http://www.driveka.ru/upload/iblock/a5b/sigmaii_userqs_manualdsieps80000005by.pdf
на с. 233 представлена схема внутреннего устройства SERVOPACK, поясняющая принцип действия сервопривода.
Образцов Павел, ведущий технический специалист ООО 21.02.2017
Расскажите принцип работы сервопривода что управляет серводвигателем шим контроллер через операционную систему или управление осуществляется энкодером обратной связи.
Леонид 21.02.2017
Добрый день!
Это предохранитель в цепи постоянного тока, скорее всего, у Вас сгорел выходной мост.
Если повезло, то сгорел только мост, если нет, то повреждена ещё и силовая плата, а при такой маленькой мощности стоимость ремонта будет больше стоимости нового.
Андреев Юрий, support@driveka.ru 13.02.2017
Добрый день! Модель sgdh-04ae, горит ошибка А-41. Подозрение на внутреннее питание. Вскрыли корпус, там предохранитель где-то 20А , пробовали поменять и подать питание без собранной обвязки, выбило автомат по питанию. Не подскажете, что запитано через этот предохранитель и что могло сгореть? Может это силовой блок? Можно ли это вылечить.
Сергей.
Сергей 13.02.2017
Добрый день!
По данному модулю не сможем помочь Вам.
Андреев Юрий, support@driveka.ru 17.01.2017
Добрый день!
Был отсоединен дополнительный модуль MP940, после того как присоединили его обратно пишет что он его не видит, ошибка А.Е0
Алексей Гребин 17.01.2017
Добый день!
Ответил Вам по электронной почте.
Андреев Юрий, support@driveka.ru 05.12.2016
Добрый день
Не подскажет ли кто что обозначает в первом 7-сегментном индикаторе горит верхний горизонтальный сегмент, средний и точка во втором не чего не горит в третьем 0 в четвертом 3 в пятом 0 модель SGDV-120A01A002000
Дмитрий 05.12.2016
Добрый день!
Не совсем понял, Вы хотите подавать группы импульсов изменяя частоту или импульсный пуск для работы с фиксированной скоростью?
Андреев Юрий, support@driveka.ru 06.10.2016
Добрый день подскажите как настроить привод sgdh-01ae-oy, чтобы он работал от сигнала разрешения на пуск и от импульсов внеред-назад?
Павел Русин 06.10.2016
Добрый вечер!
Это ошибка означает «потеря связи с энкодером». Необходимо проверить подключение кабеля датчика обратной связи, либо у Вас повреждён энкодер.
Андреев Юрий, support@driveka.ru 20.09.2016
Добрый вечер при запуске серво привода высвечивается ошибка АС9 подскажите что это такое и как с этим боротся
А.И 20.09.2016
Здравствуйте, Виктор! -OY это стандартная версия, -Y12 какая-то специализированная версия, возможно изготовлена под конкретного OEMа.
Александр, Драйвика 07.09.2016
Здравствуйте,
Скажите пожалуйста в чем различие моделей SGDH-15DE-OY и SGDH-15DE-Y12.
Васильчук Виктор 07.09.2016
Добрый день!
Данная ошибка означает, что мотор отключен от преобразователя, либо момент на валу двигателя менее 10% от заданного.
Андреев Юрий, support@driveka.ru 14.10.2015
Здравствуйте, мониторе sgdm-15 не документированная ошибка AF5. Подскажите порядок действий на сообщение.
С уважением. 22.09.2015
-
Evgeniy1
- Новичок
- Сообщения: 38
- Зарегистрирован: 17 окт 2013, 17:57
- Репутация: 1
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Все подключено, работает, опишу что и как сделал(мало ли кому-то пригодиться)
3 сервопака yaskawa SGDH-01AE и 3 сервомотора yaskawa sgmah-01aaf41
вот мануал-
http://www.techtrends.ru/docs/omron/sis … 00005C.pdf
обрезал старые разъемы часть купил в России, часть на ebay,
CN1 разъем 50 пинов на ebay 10150 (так искал)
CN3 разъем 14 пинов на ebay 10114
Заказал сразу кабель(был недорогой)
CN2 разъем 6 пинов ЧИПиДИП ieee1394
схема подключения проводов СN1

схема подключения проводов СN2

думаю что в мануале есть и про CN3
вылезло пара ошибок, забил ошибку в гугл, по первой ссылке переходил и там было описано ее решение
далее была автоматическая настройка, об этом выше, отдельное спасибо aftaev
как оказалось ничего сложного
двигатели работают через редукцию 1 к 3.
и теперь я понял что шаговые двигатели с серводвигателями сравнивать нельзя.
стоял шаговик на 4.5НМ напрямую, при 3000мм/мин можно было упереться и остановить рукой, с сервами не получается такое, тк момент стабилен на всех скоростях. по оси Z поднимал около 150кг вообще как буд-то для него это не нагрузка. максимальная скорость ограничивается Mach3 около 21000мм/мин
, при такой скорости станок раскачиваться начинает, естественно для свободных перемещений она уменьшина.
Всем большое спасибо за помощь.
-
aftaev
- Зачётный участник

- Сообщения: 34042
- Зарегистрирован: 04 апр 2010, 19:22
- Репутация: 6188
- Откуда: Казахстан.
- Контактная информация:

Re: как подключить и настроить servopacks Yaskawa?
Сообщение
aftaev »
Evgeniy1 писал(а): максимальная скорость ограничивается Mach3 около 21000мм/мин
Если редукцию(имп/на оборот уменьшить) поменять в Яскаве то можно и выше покрутить ![]()
Дилетанту сложные вещи кажутся очень простыми, и только профессионал понимает насколько сложна самая простая вещь
Кто хочет — ищет возможности, кто не хочет — ищет оправдание.
Найди работу по душе и тебе не придется работать.
-
Evgeniy1
- Новичок
- Сообщения: 38
- Зарегистрирован: 17 окт 2013, 17:57
- Репутация: 1
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
Evgeniy1 »
aftaev писал(а):
Evgeniy1 писал(а): максимальная скорость ограничивается Mach3 около 21000мм/мин
Если редукцию(имп/на оборот уменьшить) поменять в Яскаве то можно и выше покрутить
Да это стало понятно когда в настройках сервопака была точность 0.001 а потом 0.01. побаловался станок погонял на максимальной скорости по Х, ремень пришел в негодность(ремень изначально бракованный был) (это когда только поставил)
-

mhael
- Мастер
- Сообщения: 2443
- Зарегистрирован: 09 мар 2013, 11:22
- Репутация: 768
- Настоящее имя: Ильдар
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
mhael »
Evgeniy1 писал(а):и теперь я понял что шаговые двигатели с серводвигателями сравнивать нельзя.
В свое время купил на пробу 100Ваттную серву. С тех пор о шаговых движках даже не думаю. Не исключаю, что они вполне хороши в своей нише. Но качественную серву если и сравнивать, то только с шаговиками не менее именитых производителей. А цена там уже и с сервоприводами сравнима.
-
aftaev
- Зачётный участник
- Сообщения: 34042
- Зарегистрирован: 04 апр 2010, 19:22
- Репутация: 6188
- Откуда: Казахстан.
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
aftaev »
mhael писал(а):Но качественную серву если и сравнивать, то только с шаговиками не менее именитых производителей.
ну или паганую серву (щеточную) с китайским шаговиком ![]()
Дилетанту сложные вещи кажутся очень простыми, и только профессионал понимает насколько сложна самая простая вещь
Кто хочет — ищет возможности, кто не хочет — ищет оправдание.
Найди работу по душе и тебе не придется работать.
-
Evgeniy1
- Новичок
- Сообщения: 38
- Зарегистрирован: 17 окт 2013, 17:57
- Репутация: 1
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
Evgeniy1 »
mhael писал(а):
Evgeniy1 писал(а):и теперь я понял что шаговые двигатели с серводвигателями сравнивать нельзя.
В свое время купил на пробу 100Ваттную серву. С тех пор о шаговых движках даже не думаю. Не исключаю, что они вполне хороши в своей нише. Но качественную серву если и сравнивать, то только с шаговиками не менее именитых производителей. А цена там уже и с сервоприводами сравнима.
ШД с 4.5 Нм подсоединенный напрямую — хороший американский ШД( название из головы вылетело), ШД такие скорости свободного перемещения не обеспечат
OSA писал(а):
Evgeniy1 писал(а):Заказал сразу кабель(был недорогой)
поделитесь ссылкой на кабель не дорогой пожалуйста.
сам многожильный кабель купил в России, CN3 (кабель и разъемы, те целый шнур) продавались в единичном экземпляре
-
mhael
- Мастер
- Сообщения: 2443
- Зарегистрирован: 09 мар 2013, 11:22
- Репутация: 768
- Настоящее имя: Ильдар
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
mhael »
Evgeniy1 писал(а):ШД такие скорости свободного перемещения не обеспечат
Ну бывают ШД, которые до 1500 крутят. Например те же Pacific Scientific или Kollmorgen. Момент конечно падает, но там главное разогнать, а потом уже особо момент не нужен. Главное еще затормозить ![]() . Но цена правда как у серв.
. Но цена правда как у серв.
Evgeniy1 писал(а):сам многожильный кабель купил в России
Искал на митинском радиорынке в Москве многожильный кабель витой на 24-25 пар 0,1-0,2мм толщиной. Предложения есть, но меньше бухты не хотят продавать. Кое-как нашел у ребят остатки. В нарез правда они тоже были согласны продать, только цену уже другую ломили, раза в полтора дороже. Но все-равно дешевле выходило, чем Online.
-

usok
- Новичок
- Сообщения: 15
- Зарегистрирован: 22 ноя 2017, 10:19
- Репутация: 1
- Настоящее имя: Виктор
- Откуда: Мосва
- Контактная информация:

Re: как подключить и настроить servopacks Yaskawa?
Сообщение
usok »
Здравствуйте, простите за возможно глупый вопрос но на днях должен получить SERVOPACK привод sgds — 04A01A с мотором SGMAH — 04AAA2C 400W, сразу возник вопроскакой мощности нужен блок питания (24v) для стояночного тормоза сервы , заранее спасибо
-

Hanter
- Мастер
- Сообщения: 5414
- Зарегистрирован: 27 янв 2012, 14:52
- Репутация: 4338
- Настоящее имя: Алексей
- Откуда: Питер
- Контактная информация:

Re: как подключить и настроить servopacks Yaskawa?
Сообщение
Hanter »
Во первых — блока питания хватит на 1 ампер.. а во вторых — SGDS — это усилок от третьей сигмы.. SGMAH — мотор от второй сигмы… вы уверены что они подружатся ?
Опыт — это когда на смену вопросам: «Что? Где? Когда? Как? Почему?» Приходит единственный вопрос: «Нахрена?»
==========================================
фрезерная и токарная обработка на станках с чпу.
Резка, гибка, сварка и порошковая окраса.
-
usok
- Новичок
- Сообщения: 15
- Зарегистрирован: 22 ноя 2017, 10:19
- Репутация: 1
- Настоящее имя: Виктор
- Откуда: Мосва
- Контактная информация:
-
Hanter
- Мастер
- Сообщения: 5414
- Зарегистрирован: 27 янв 2012, 14:52
- Репутация: 4338
- Настоящее имя: Алексей
- Откуда: Питер
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
Hanter »
usok писал(а):здесь работает
если это конкретно то что отправили вам — считайте что повезло. Поддержку старых моторов в сервопаки 3 сигмы ввели в последних прошивках. привода первых поколений не работали со старыми.
Опыт — это когда на смену вопросам: «Что? Где? Когда? Как? Почему?» Приходит единственный вопрос: «Нахрена?»
==========================================
фрезерная и токарная обработка на станках с чпу.
Резка, гибка, сварка и порошковая окраса.
-
usok
- Новичок
- Сообщения: 15
- Зарегистрирован: 22 ноя 2017, 10:19
- Репутация: 1
- Настоящее имя: Виктор
- Откуда: Мосва
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
usok »
Hanter, приедет посмотрим, спасибо
а если не заработает можно ли самостоятельно перепрошить или выход будет только блок искать и мотор
-
Hanter
- Мастер
- Сообщения: 5414
- Зарегистрирован: 27 янв 2012, 14:52
- Репутация: 4338
- Настоящее имя: Алексей
- Откуда: Питер
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
Hanter »
не, самостоятельно не перешьете. ну во всяком случае для меня это невыполнимая задача. плюс нада саму прошивку где то взять. Но я думаю что раз вам подали его как комплект, и продемонстрировали работу — должно быть все нормально. я больше чтобы уточнить написал. что бы вы обратили на это внимание.
Опыт — это когда на смену вопросам: «Что? Где? Когда? Как? Почему?» Приходит единственный вопрос: «Нахрена?»
==========================================
фрезерная и токарная обработка на станках с чпу.
Резка, гибка, сварка и порошковая окраса.
-
usok
- Новичок
- Сообщения: 15
- Зарегистрирован: 22 ноя 2017, 10:19
- Репутация: 1
- Настоящее имя: Виктор
- Откуда: Мосва
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
usok »
Hanter писал(а):не, самостоятельно не перешьете. ну во всяком случае для меня это невыполнимая задача. плюс нада саму прошивку где то взять. Но я думаю что раз вам подали его как комплект, и продемонстрировали работу — должно быть все нормально. я больше чтобы уточнить написал. что бы вы обратили на это внимание.
Благодарю
-

Serg
- Мастер
- Сообщения: 21923
- Зарегистрирован: 17 апр 2012, 14:58
- Репутация: 5181
- Заслуга: c781c134843e0c1a3de9
- Настоящее имя: Сергей
- Откуда: Москва
- Контактная информация:

Re: как подключить и настроить servopacks Yaskawa?
Сообщение
Serg »
Моторы Σ II (SGMAH, SGMPH, SGMSH, SGMCS) изначально поддерживаются сервопаками Σ ΙΙΙ, об этом в доке на сервопак прямо сказано.
Я не Христос, рыбу не раздаю, но могу научить, как сделать удочку…
-
Hanter
- Мастер
- Сообщения: 5414
- Зарегистрирован: 27 янв 2012, 14:52
- Репутация: 4338
- Настоящее имя: Алексей
- Откуда: Питер
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
Hanter »
Сергей, не надо вводить людей в заблуждение.
Изначально поддержка была заявлена только для высокомоментной серии моторов.
или я может опять какой то не тот мануал смотрю….. ![]()
Опыт — это когда на смену вопросам: «Что? Где? Когда? Как? Почему?» Приходит единственный вопрос: «Нахрена?»
==========================================
фрезерная и токарная обработка на станках с чпу.
Резка, гибка, сварка и порошковая окраса.
-
Serg
- Мастер
- Сообщения: 21923
- Зарегистрирован: 17 апр 2012, 14:58
- Репутация: 5181
- Заслуга: c781c134843e0c1a3de9
- Настоящее имя: Сергей
- Откуда: Москва
- Контактная информация:
Re: как подключить и настроить servopacks Yaskawa?
Сообщение
Serg »
Hanter писал(а):или я может опять какой то не тот мануал смотрю…..
Типа того. ![]() В мануале на сервопак Σ ΙΙΙ этого и не напишут — покупатели ж тогда старый мотор не выкинут и новый не купят это ж мануал именно на Σ ΙΙΙ.
В мануале на сервопак Σ ΙΙΙ этого и не напишут — покупатели ж тогда старый мотор не выкинут и новый не купят это ж мануал именно на Σ ΙΙΙ. ![]()
Это в доке на мотор сказано (с телефона не готов искать и выкладывать). И ещё недавно натыкался на упоминание моторов Σ ΙΙ в доке на SGDS с мехатролинком.
Ещё каталоге есть отдельная позиция для комлекта кабелей сервопак Σ ΙΙΙ — мотор Σ ΙΙ.
Я не Христос, рыбу не раздаю, но могу научить, как сделать удочку…
![]()
Σ -II Series
SGDH User’s Manual Supplement for Linear Sigma Series
Upon receipt of the product and prior to initial operation, read these instructions thoroughly, and retain for future reference.

Copyright © 2003 YASKAWA ELECTRIC CORPORATION
All rights reserved. No part of this publication may be reproduced, stored in a retrieval system, or transmitted, in any form, or by any means, mechanical, electronic, photocopying, recording, or otherwise, without the prior written permission of Yaskawa. No patent liability is assumed with respect to the use of the information contained herein. Moreover, because Yaskawa is constantly striving to improve its high-quality products, the information contained in this manual is subject to change without notice. Every precaution has been taken in the preparation of this manual. Nevertheless, Yaskawa assumes no responsibility for errors or omissions. Neither is any liability assumed for damages resulting from the use of the information contained in this publication.
About this Manual
Intended Audience
This manual is intended for the following users.
•Those selecting Σ-II Series servodrives or peripheral devices for Σ-II Series servodrives.
•Those wanting to know about the ratings and characteristics of Σ-II Series servodrives.
•Those designing Σ-II Series servodrive systems.
•Those installing or wiring Σ-II Series servodrives.
•Those performing trial operation or adjustments of Σ-II Series servodrives.
•Those maintaining or inspecting Σ-II Series servodrives.
Description of Technical Terms
The terms in this manual are defined as follows:
•Servomotor or motor = Linear Σ Series SGLGW, SGLFW and SGLTW linear servomotor
•SERVOPACK = Σ-II Series SGDH amplifier.
•Servodrive = A set including a servomotor and servo amplifier.
•Servo System = A servo control system that includes the combination of a servodrive with a host
computer and peripheral devices.
•Parameter number = Numbers that the user inputs toward the SERVOPACK.
Indication of Reverse Signals
In this manual, the names of reverse signals (ones that are valid when low) are written with a forward slash (/) before the signal name, as shown in the following example:
•S-ON = /S-ON
•P-CON = /P-CON
iii

Quick access to your required information
Read the chapters marked with 9 to get the information required for your purpose.
|
SERVOPACK |
Panel |
Trial |
Inspection |
||||
|
s, Linear |
|||||||
|
Ratings and |
System |
Operation |
|||||
|
Chapter |
Servomotors, |
Configuration |
and |
||||
|
Characteristics |
Design |
and Servo |
|||||
|
and Peripheral |
and Wiring |
Maintenance |
|||||
|
Devices |
Adjustment |
||||||
|
Chapter 1 |
9 |
||||||
|
Outline |
|||||||
|
Chapter 2 |
9 |
||||||
|
Selections |
|||||||
|
Chapter 3 |
|||||||
|
Linear Servomotor |
9 |
9 |
9 |
9 |
|||
|
Specifications and |
|||||||
|
Dimensional Drawings |
|||||||
|
Chapter 4 |
9 |
9 |
9 |
9 |
|||
|
SERVOPACK Specifications |
|||||||
|
and Dimensional Drawings |
|||||||
|
Chapter 5 |
9 |
9 |
9 |
9 |
|||
|
Serial Converter Unit |
|||||||
|
Specifications and Drawings |
|||||||
|
Chapter 6 |
|||||||
|
Specifications and Drawings |
9 |
9 |
9 |
9 |
|||
|
of Cables and Peripheral |
|||||||
|
Devices |
|||||||
|
Chapter 7 |
9 |
9 |
9 |
||||
|
Installation and Wiring |
|||||||
|
Chapter 8 |
9 |
9 |
|||||
|
Panel Operator |
|||||||
|
Chapter 9 |
9 |
||||||
|
Operation |
|||||||
|
Chapter 10 |
9 |
||||||
|
Adjustment |
|||||||
|
Chapter 11 |
9 |
||||||
|
Inspection, Maintenance, and |
|||||||
|
Troubleshooting |
|||||||
|
Chapter 12 |
9 |
9 |
9 |
9 |
|||
|
Appendix |
|||||||
■ Visual Aids
The following aids are used to indicate certain types of information for easier reference.
IMPORTANT
INFO
 EXAMPLE
EXAMPLE 
TERMS
•Indicates important information that should be memorized, including precautions such as alarm displays to avoid damaging the devices.
•Indicates supplemental information.
•Indicates application examples.
•Indicates definitions of difficult terms or terms that have not been previously explained in this manual.
iv

Related Manuals
Refer to the following manuals as required.
|
Manual Name |
Manual Number |
Contents |
|
Σ-II Series |
TOBPS80000004 |
Describes the safety precautions on using a SERVO- |
|
AC SERVOPACK SGDH/SGDM |
PACK in the Σ-II Series. |
|
|
SAFETY PRECAUTIONS |
||
|
Σ-II Series SGM H/SGDM |
TOE-S800-34 |
Provides detailed information on the operating method |
|
Digital Operator Operation Manual |
of the JUSP-OP02A-2 digital operator (option). |
|
|
Σ-II Series SGDH MECHATROLINK |
SIE-C718-4 |
Provides detailed information on MECHATROLINK |
|
Interface Unit User’s Manual |
communications. |
|
|
Model: JUSP-NS100 |
||
|
Σ-II Series SGDH MECHATROLINK-II |
SIEPC71080001 |
Provides detailed information on MECHATROLINK-II |
|
Application Module User’s Manual |
communications. |
|
|
Model: JUSP-NS115 |
||
|
Σ-II Series SGDH |
SIE-C718-6 |
Describes the DeviceNet communications. |
|
DeviceNet Interface Unit |
||
|
User’s Manual |
||
|
Model: JUSP-NS300 |
||
|
Σ-II Series SGDH PROFIBUS-DP |
SIE-C718-8 |
Describes the PROFIBUS-DP communications. |
|
IF UNIT User’s Manual |
||
|
Model: JUSP-NS500 |
||
|
Σ-II Series Indexer Application Module |
SIE-C718-9 |
Provides detailed information on positioning by com- |
|
User’s Manual |
munications and the contact points. |
|
|
Model: JUSP-NS600 |
||
v
Safety Information
The following conventions are used to indicate precautions in this manual. Failure to heed precautions provided in this manual can result in serious or possibly even fatal injury or damage to the products or to related equipment and systems.
|
WARNING |
Indicates precautions that, if not heeded, could possibly result in loss of life or serious |
|
injury. |
|

 CAUTION
CAUTION

 PROHIBITED
PROHIBITED
MANDATORY
Indicates precautions that, if not heeded, could result in relatively serious or minor injury, damage to the product, or faulty operation.
In some situations, the precautions indicated could have serious consequences if not heeded.
Indicates prohibited actions that must not be performed. For example, this symbol would be used as follows to indicate that fire is prohibited:  .
.
Indicates compulsory actions that must be performed. For example, this symbol would be used as follows to indicate that grounding is compulsory:  .
.
The warning symbols for ISO and JIS standards are different, as shown below.
The ISO symbol is used in this manual.
Both of these symbols appear on warning labels on Yaskawa products. Please abide by these warning labels regardless of which symbol is used.
vi
Notes for Safe Operation
Read this manual thoroughly before checking products on delivery, storage and transportation, installation, wiring, operation and inspection, and disposal of the AC servodrive.
 WARNING
WARNING
•If you have a pacemaker or any other electronic medical device, do not go near the magnetic way of the linear servomotor.
Failure to observe this warning may result in the malfunction of the medical device.
•Be sure to use nonmagnetic tools when installing or working close to the linear servomotor. (Example: a beryllium-copper alloy hexagonal wrench set, made by NGK Insulators, Ltd.)
•If starting an operation with the linear servomotor in a machine, set the linear servomotor to always allow emergency stops.
Failure to observe this warning may result in injury.
•Never touch the linear servomotor or machinery during operation.
Failure to observe this warning may result in injury.
•Before wiring, install the SERVOPACK and the linear servomotor.
Failure to observe this warning may result in electric shock.
•Do not operate switches with wet hands.
Failure to observe this warning may result in electric shock.
•Never touch the inside of the SERVOPACKs.
Failure to observe this warning may result in electric shock.
•Do not touch terminals for five minutes after the power is turned OFF.
Residual voltage may cause electric shock.
•Do not touch terminals for five minutes after voltage resistance test.
Residual voltage may cause electric shock.
•Make sure that the main circuit power cable, the control power cable, and the linear servomotor main circuit cable are wired correctly.
Failure to observe this warning may result in damage to the SERVOPACK.
•Follow the procedures and instructions for trial operation precisely as described in this manual.
Malfunctions that occur after the servomotor is connected to the equipment not only damage the equipment, but may also cause an accident resulting in death or injury.
•The SGDH SERVOPACK supports both AC and DC power. If DC power is supplied to the SERVOPACK without setting Pn001=n. 1 (DC power input), the internal components of the SERVOPACK will burn and may result in fire or serious damage.
Before using a DC power supply, be sure to check the parameter Pn001 setting.
•Do not remove the front cover, cables, connectors, or optional items while the power is ON.
Failure to observe this warning may result in electric shock.
•Do not damage, press, exert excessive force or place heavy objects on the cables.
Failure to observe this warning may result in electric shock, stopping operation of the product, or burning.
vii
 WARNING
WARNING
•Provide an appropriate stopping device on the machine side to ensure safety.
Failure to observe this warning may result in injury.
•Do not come close to the machine immediately after resetting momentary power loss to avoid an unexpected restart. Take appropriate measures to ensure safety against an unexpected restart.
Failure to observe this warning may result in injury.
•Connect the ground terminal to electrical codes (ground resistance: 100 Ω or less).
Improper grounding may result in electric shock or fire.
•Installation, disassembly, or repair must be performed only by authorized personnel.
Failure to observe this warning may result in electric shock or injury.
•Do not modify the product.
Failure to observe this warning may result in injury or damage to the product.
Checking on Delivery
 CAUTION
CAUTION
•Always use the linear servomotor and SERVOPACK in one of the specified combinations.
Failure to observe this caution may result in fire or malfunction.
Storage and Transportation
 CAUTION
CAUTION
•Be sure to store the magnetic way of the linear servomotor in the same way as it was originally packaged.
•Do not store or install the product in the following places.
•Locations subject to direct sunlight.
•Locations subject to temperatures outside the range specified in the storage or installation temperature conditions.
•Locations subject to humidity outside the range specified in the storage or installation humidity conditions.
•Locations subject to condensation as the result of extreme changes in temperature.
•Locations subject to corrosive or flammable gases.
•Locations subject to dust, salts, or iron dust.
•Locations subject to exposure to water, oil, or chemicals.
•Locations subject to shock or vibration.
Failure to observe this caution may result in fire, electric shock, or damage to the product.
•Do not carry the linear servomotor by its cables.
Failure to observe this caution may result in injury or malfunction.
•Do not place any load exceeding the limit specified on the packing box.
Failure to observe this caution may result in injury or malfunction.
viii

Installation
 CAUTION
CAUTION
•When unpacking and installing magnetic way, check that no metal fragments or magnetized objects near the stator because they may be affected by the magnetic attraction of the magnetic way.
Failure to observe this caution may result in injury or damage to the magnetic way’s magnets.
•Do not use the magnetic way near metal or other magnetized objects.
Failure to observe this caution may result in injury.
•Do not place clocks, magnetic cards, floppy disks, or measuring instruments close to the magnetic way.
Failure to observe this caution may result in malfunction or damage to these items by the magnetic force.
•Securely mount the linear servomotor on to the machine.
If the linear servomotor is not mounted securely, it may loosen during operation.
•Do not carry the magnetic way by its magnet protection cover.
Failure to observe this caution may result in injury by the cover’s edge or the shape of the cover may become distorted.
Cover
Magnetic way
•When removing the dummy plate for reducing magnetic force used for the SGLFM magnetic way, pay attention to the magnetic attraction of the magnetic way. Do not place the removed plate close to the magnetic way.
Failure to observe this caution may result in injury or damage to the magnetic way’s magnets or the magnet protection cover.
•Install SERVOPACKs, linear servomotors, and regenerative resistors on nonflammable objects.
Mounting directly onto or near flammable objects may result in fire.
•Never use the products in an environment subject to water, corrosive gases, inflammable gases, or combustibles.
Failure to observe this caution may result in electric shock or fire.
•Do not step on or place a heavy object on the product.
Failure to observe this caution may result in injury.
•Do not cover the inlet or outlet parts and prevent any foreign objects from entering the product.
Failure to observe this caution may cause internal elements to deteriorate resulting in malfunction or fire.
•Be sure to install the product in the correct direction.
Failure to observe this caution may result in malfunction.
•Provide the specified clearances between the SERVOPACK and the control panel or with other devices.
Failure to observe this caution may result in fire or malfunction.
•Do not apply any strong impact.
Failure to observe this caution may result in malfunction.
ix
Wiring
 CAUTION
CAUTION
•Securely tighten the cable connector screws and securing mechanism.
If the connector screws and securing mechanism are not secure, they may loosen during operation.
•Use power lines and cables with a radius, heat resistance, and flexibility suitable for the system.
•If the SERVOPACK malfunctions, turn OFF the main circuit’s power supply of the SERVOPACK.
The continuous flow of a large current may cause fire.
•Use a noise filter to minimize the effects of electromagnetic damage.
Failure to observe this caution may result in electromagnetic damage to electronic devices used near the SERVOPACK.
•Do not connect a three-phase power supply to the U, V, or W output terminals.
Failure to observe this caution may result in injury or fire.
•Securely connect the power supply terminals and motor output terminals.
Failure to observe this caution may result in fire.
•Do not bundle or run power and signal lines together in the same duct. Keep power and signal lines separated by at least 30 cm (11.81 in).
Failure to observe this caution may result in malfunction.
•Use shielded twisted-pair wire or shielded multi-core twisted-pair wire for the signal lines and feedback lines of the serial converter unit (SC).
The maximum wiring length is 3 m for the reference input line and 20 m for the SC feedback line.
•Do not touch the power terminals for five minutes after turning power OFF because high voltage may still remain in the SERVOPACK.
Make sure the charge indicator is turned OFF first before starting an inspection.
•Avoid frequently turning power ON and OFF. Do not turn power ON or OFF more than once per minute.
Since the SERVOPACK has a capacitor in the power supply, a high charging current flows for 0.2 seconds when power is turned ON. Frequently turning power ON and OFF causes main power devices such as capacitors and fuses to deteriorate, resulting in unexpected problems.
•Observe the following precautions when wiring main circuit terminal blocks.
•Remove the terminal block from the SERVOPACK prior to wiring.
•Insert only one wire per terminal on the terminal block.
•Make sure that the core wire is not electrically shorted to adjacent core wires.
•Do not connect the SERVOPACK for 100 V and 200 V directly to a voltage of 400 V.
The SERVOPACK will be destroyed.
•Be sure to wire correctly and securely.
Failure to observe this caution may result in motor overrun, injury, or malfunction.
•Always use the specified power supply voltage.
An incorrect voltage may result in burning.
•Make sure that the polarity is correct.
Incorrect polarity may cause ruptures or damage.
•Take appropriate measures to ensure that the input power supply is supplied within the specified voltage fluctuation range. Be particularly careful in places where the power supply is unstable.
An incorrect power supply may result in damage to the product.
x
![]()
 CAUTION
CAUTION
•Install external breakers or other safety devices against short-circuiting in external wiring.
Failure to observe this caution may result in fire.
•Take appropriate and sufficient countermeasures for each when installing systems in the following locations.
•Locations subject to static electricity or other forms of noise.
•Locations subject to strong electromagnetic fields and magnetic fields.
•Locations subject to possible exposure to radioactivity.
•Locations close to power supplies including power supply lines.
Failure to observe this caution may result in damage to the product.
Operation
 CAUTION
CAUTION
•Do not stand within the machine’s range of motion during operation.
Failure to observe this caution may result in injury.
•Before operation, install a limit switch or stopper on the end of the slider to prevent unexpected movement.
Failure to observe this caution may result in injury.
•Before starting operation with a machine connected, change the settings to match the parameters of the machine.
Starting operation without matching the proper settings may cause the machine to run out of control or malfunction.
•Forward run prohibited (P-OT) and reverse run prohibited (N-OT) signals are not effective during zero point search mode using parameter Fn003.
•If using the linear servomotor on a vertical axis, install a safety device such as a counterbalance so that the workpiece does not fall if an alarm or overtravel occurs. Set the linear servomotor so that it will stop in the zero clamp state at occurrence of overtravel.
The workpiece may fall during overtraveling.
•When not using the online autotuning, set to the correct mass ratio.
Setting to an incorrect moment of inertia ratio may cause vibration.
•Do not touch the SERVOPACK heatsinks, regenerative resistor, or servomotor while power is ON or soon after the power is turned OFF.
Failure to observe this caution may result in burns due to high temperatures.
•Do not make any extreme adjustments or setting changes of parameters.
Failure to observe this caution may result in injury due to unstable operation.
•When an alarm occurs, remove the cause, reset the alarm after confirming safety, and then resume operation.
Failure to observe this caution may result in injury.
xi
Maintenance and Inspection
 CAUTION
CAUTION
•When replacing the SERVOPACK, transfer the previous SERVOPACK parameters to the new SERVOPACK before resuming operation.
Failure to observe this caution may result in damage to the product.
•Do not attempt to change wiring while the power is ON.
Failure to observe this caution may result in electric shock or injury.
•Do not disassemble the linear servomotor.
Failure to observe this caution may result in electric shock or injury.
Disposal
 CAUTION
CAUTION
•When disposing of the products, treat them as ordinary industrial waste.
General Precautions
Note the following to ensure safe application.
•The drawings presented in this manual are sometimes shown without covers or protective guards. Always replace the cover or protective guard as specified first, and then operate the products in accordance with the manual.
•The drawings presented in this manual are typical examples and may not match the product you received.
•This manual is subject to change due to product improvement, specification modification, and manual improvement. When this manual is revised, the manual code is updated and the new manual is published as a next edition.
•If the manual must be ordered due to loss or damage, inform your nearest Yaskawa representative or one of the offices listed on the back of this manual.
•Yaskawa will not take responsibility for the results of unauthorized modifications of this product. Yaskawa shall not be liable for any damages or troubles resulting from unauthorized modification.
xii

CONTENTS
About this Manual — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — iii Related Manuals — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — v Safety Information — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — vi Notes for Safe Operation — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — vii
1
Outline
1.1 Checking Products — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-2
1.1.1 Check Items — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-2
1.1.2 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-2
1.1.3 SERVOPACKs — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-3
1.1.4 Serial Converter Units — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-4
1.2 Product Part Names — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-5
1.2.1 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-5
1.2.2 SERVOPACKs — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-6
1.3 Examples of Servo System Configurations — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-8
1.3.1 Single-phase, 200 V Main Circuit — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-8 1.3.2 Three-phase, 200 V Main Circuit- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-9 1.3.3 Three-phase, 400 V Main Circuit- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-10
1.4 Applicable Standards — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-11
1.4.1 North American Safety Standards (UL, CSA) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-11
1.4.2 CE Marking- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-11
2
Selections
2.1 Linear Servomotor Model Designation — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-2
2.1.1 Coil Assembly — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-2
2.1.2 Magnetic Way — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-2
2.2 SERVOPACK Model Designation- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-3 2.3 Σ-II Series SERVOPACKs and Applicable Linear Servomotors — — — — — — — — — — — — 2-4 2.4 Serial Converter Units Models — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-6 2.5 Selecting Cables — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-7 2.6 Selecting Peripheral Devices — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-9
2.6.1 Special Options — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-9 2.6.2 Molded-case Circuit Breaker and Fuse Capacity — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-11 2.6.3 Noise Filters and DC Reactors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-12
xiii

2.6.4 Regenerative Resistors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -2-13
2.6.5 Linear Scales — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -2-14
3
Specifications and Dimensional Drawings
3.1 Ratings and Specifications of SGLGW/SGLGM — — — — — — — — — — — — — — — — — — — — — — — — 3-2 3.2 Ratings and Specifications of SGLFW/SGLFM — — — — — — — — — — — — — — — — — — — — — — — — 3-6 3.3 Ratings and Specifications of SGLTW/SGLTM- — — — — — — — — — — — — — — — — — — — — — — — — 3-9 3.4 Mechanical Specifications of Linear Servomotors — — — — — — — — — — — — — — — — — — — — — 3-15 3.5 Quick Guide to Linear Servomotor Dimensional Drawings — — — — — — — — — — — — — — — 3-16 3.6 Dimensional Drawings of SGLGW/SGLGM Linear Servomotors — — — — — — — — — — — 3-17
3.6.1 SGLG -30 Linear Servomotors- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-17 3.6.2 SGLG -40 Linear Servomotors- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-19 3.6.3 SGLG -60 Linear Servomotors- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-22 3.6.4 SGLG -90 Linear Servomotors- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-25
3.7 Dimensional Drawings of SGLFW/SGLFM Linear Servomotors — — — — — — — — — — — 3-27
3.7.1 SGLF -20 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-27
3.7.2 SGLF -35 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-29
3.7.3 SGLF -50 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-31
3.7.4 SGLF -1Z Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-33
3.8 Dimensional Drawings of SGLTW / SGLTM Linear Servomotors — — — — — — — — — — — 3-35
3.8.1 SGLT -20 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-35
3.8.2 SGLT -35 A Linear Servomotors- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-38
3.8.3 SGLT -35 H Linear Servomotors- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-41
3.8.4 SGLT -40 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-43
3.8.5 SGLT -50 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-46
3.8.6 SGLT -80 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -3-48
4
SERVOPACK Specifications and Dimensional Drawings
4.1 SERVOPACK Ratings and Specifications — — — — — — — — — — — — — — — — — — — — — — — — — — — — 4-2
4.1.1 Single-phase/Three-phase 200 V- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -4-2
4.1.2 Three-phase 400 V — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -4-2
4.1.3 SERVOPACK Ratings and Specifications — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -4-3
4.2 SERVOPACK Installation — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 4-5 4.3 SERVOPACK Internal Block Diagrams — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 4-7
4.3.1 Single-phase 200 V, 50 W to 400 W Models — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -4-7 4.3.2 Three-phase 200 V, 500 W to 1.5 kW Models — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -4-8 4.3.3 Three-phase 200 V, 2.0 kW to 5.0 kW Models — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -4-8
xiv

4.3.4 Three-phase 200 V, 7.5 kW Models- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 4-9 4.3.5 Three-phase 400 V, 500 W to 3.0 kW Models- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 4-9 4.3.6 Three-phase 400 V, 5.0 kW Model — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 4-10 4.3.7 Three-phase 400 V, 7.5 kW Models- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 4-10
4.4 SERVOPACK’s Power Supply Capacities and Power Losses — — — — — — — — — — — — — 4-11 4.5 SERVOPACK Overload Characteristics and Allowable Load Mass — — — — — — — — — 4-12
4.5.1 Overload Characteristics — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 4-12 4.5.2 Starting Time and Stopping Time- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 4-13
4.6 SERVOPACK Dimensional Drawings — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 4-14 4.7 Dimensional Drawings of Base-mounted SERVOPACK Model — — — — — — — — — — — — 4-15
|
4.7.1 Single-phase 200 V: 50 W/100 W/200 W (A5AE/01AE/02AE) — — — — — — — — — — — — — — — — — — — — — — |
4-15 |
|
4.7.2 Single-phase 200 V: 400 W (04AE)- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
4-16 |
|
4.7.3 Three-phase 200 V: 500 W/750 W/1.0 kW (05AE/08AE/10AE) — — — — — — — — — — — — — — — — — — — — — |
4-17 |
|
4.7.4 Three-phase 200 V: 1.5 kW (15AE) |
|
|
Three-phase 400 V: 500 W/750 W/1.0 kW/1.5 kW (05DE/08DE/10DE/15DE) — — — — — — — — — — — |
4-18 |
|
4.7.5 Three-phase 200 V: 2.0 kW/3.0 kW (20AE/30AE) |
|
|
Three-phase 400 V: 2.0 kW/3.0 kW (20DE/30DE) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
4-19 |
|
4.7.6 Three-phase 200 V: 5.0 kW (50AE) |
|
|
Three-phase 400 V: 5.0 kW (50DE) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
4-20 |
|
4.7.7 Three-phase 200 V: 7.5 kW (75AE)- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
4-21 |
|
4.7.8 Three-phase 400 V: 7.5 kW (75DE)- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
4-22 |
5
Specifications and Dimensional
Drawings of Serial Converter Unit
5.1 Serial Converter Unit Specifications — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 5-2 5.2 Analog Signal Input Timing — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 5-3 5.3 Dimensional Drawings of Serial Converter Unit — — — — — — — — — — — — — — — — — — — — — — — — 5-4
5.3.1 Linear Scale with Cable for Hall Sensor by Heidenhain — — — — — — — — — — — — — — — — — — — — — — — — — — — — 5-4 5.3.2 Linear Scale with Cable for Hall Sensor by Renishaw — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 5-6
6
Specifications and Dimensional
Drawings of Cables and Peripheral Devices
6.1 Linear Servomotor Main Circuit Cables- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 6-2 6.2 Cables for Connecting Serial Converter Units — — — — — — — — — — — — — — — — — — — — — — — — — 6-7 6.3 Cables for Connecting Linear Scales — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 6-8 6.4 Cables for Connecting Hall Sensors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 6-9
xv

6.5 Flexible Cables- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 6-10
6.6 SERVOPACK Main Circuit Wire Size — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 6-12
6.6.1 Cable Types- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-12
6.6.2 Single-phase 200 V — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-13
6.6.3 Three-phase 200 V — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-13
6.6.4 Three-phase 400 V — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-14
6.7 I/O Signal Cables for CN1 Connector — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 6-15
6.7.1 Standard Cables- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-15 6.7.2 Connector Type and Cable Size- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-15 6.7.3 Connection Diagram — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-17
6.8 Peripheral Devices — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 6-18
6.8.1 Cables for Connecting Personal Computers — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-18 6.8.2 Digital Operator — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-18 6.8.3 Cables for Analog Monitor — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-19 6.8.4 Connector Terminal Block Converter Unit — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-20 6.8.5 External Regenerative Resistor — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-21 6.8.6 Regenerative Resistor- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-22 6.8.7 Molded-case Circuit Breaker (MCCB) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-23 6.8.8 Noise Filter — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-24 6.8.9 DC Reactor for Harmonic Suppression — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-28 6.8.10 MECHATROLINK application module — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-30 6.8.11 DeviceNet application module — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-31 6.8.12 PROFIBUS-DP application module- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-32 6.8.13 INDEXER application module — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -6-34
7
Wiring
7.1 Linear Servomotor Installation — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-2
7.1.1 Introduction — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -7-2 7.1.2 SGLGW and SGLGM Linear Servomotors (Coreless Types)- — — — — — — — — — — — — — — — — — — — — — — — -7-4 7.1.3 SGLFW and SGLFM Linear Servomotor (F-shaped with Core) — — — — — — — — — — — — — — — — — — — — — — -7-7 7.1.4 SGLTW and SGLTM Linear Servomotor (T Type with Iron Core) — — — — — — — — — — — — — — — — — — — — — 7-11
7.2 Wiring Main Circuit — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-16
7.2.1 Names and Functions of Main Circuit Terminals — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -7-16 7.2.2 Wiring Main Circuit Power Supply Connector (Spring Type) — — — — — — — — — — — — — — — — — — — — — — — -7-18 7.2.3 Typical Main Circuit Wiring Examples — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -7-19
7.3 Wiring Encoders- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-22
7.3.1 Connecting an Encoder (CN2) and Output Signals from the SERVOPACK- — — — — — — — — — — — — -7-22 7.3.2 Encoder Connector (CN2) Terminal Layout — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -7-22
7.4 Examples of I/O Signal Connections — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-23
7.4.1 Speed Control Mode — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -7-23
xvi

7.4.2 Position Control Mode — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-24
7.4.3 Force Control Mode- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-25
7.4.4 I/O Signal Connector (CN1) Terminal Layout — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-26
7.4.5 I/O Signal (CN1) Names and Functions — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-27
7.4.6 Interface Circuit- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-29
7.5 Others — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-32
7.5.1 Wiring Precautions — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-32 7.5.2 Wiring for Noise Control — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-33 7.5.3 Using More Than One SERVOPACK- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-36 7.5.4 Operating Conditions on 400-V Power Supply Voltage — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-37 7.5.5 DC Reactor for Harmonic Suppression — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-38
7.6 Connecting Regenerative Resistors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-39
7.6.1 Regenerative Power and Regenerative Resistance — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-39
7.6.2 Connecting External Regenerative Resistors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 7-39
8
Digital Operator/Panel Operator
8.1 Functions on Digital Operator/Panel Operator — — — — — — — — — — — — — — — — — — — — — — — — — 8-2
|
8.1.1 |
Connecting the Digital Operator — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
8-2 |
|
8.1.2 Key Names and Functions — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
8-3 |
|
|
8.1.3 |
Basic Mode Selection and Operation- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
8-4 |
|
8.1.4 |
Status Display — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
8-6 |
8.2 Operation in Utility Function Mode (Fn ) — — — — — — — — — — — — — — — — — — — — — — — — — 8-8
8.2.1 List of Utility Function Modes — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-8 8.2.2 Alarm Traceback Data Display (Fn000) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-9 8.2.3 JOG Mode Operation (Fn002) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-10 8.2.4 Zero-point Search Mode (Fn003) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-11 8.2.5 Parameter Settings Initialization (Fn005) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-12 8.2.6 Alarm Traceback Data Clear (Fn006) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-13 8.2.7 Automatic Offset-adjustment of Motor Current Detection Signal (Fn00E) — — — — — — — — — — — — — — 8-14 8.2.8 Manual Offset-adjustment of Motor Current Detection Signal (Fn00F) — — — — — — — — — — — — — — — — 8-15 8.2.9 Password Setting (Protects Parameters from Being Changed) (Fn010) — — — — — — — — — — — — — — — 8-16 8.2.10 Motor Models Display (Fn011) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-17 8.2.11 Software Version Display (Fn012) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-18 8.2.12 Application Module Detection Results Clear (Fn014)- — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-19
8.3 Operation in Parameter Setting Mode (Pn )- — — — — — — — — — — — — — — — — — — — — — 8-20
8.3.1 Setting Parameters — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-20
8.3.2 Input Circuit Signal Allocation — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-24
8.3.3 Output Circuit Signal Allocation- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-28
8.4 Operation in Monitor Mode (Un ) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-30
8.4.1 List of Monitor Modes — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 8-30
xvii

8.4.2 Sequence I/O Signal Monitor Display — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -8-31 8.4.3 Operation in Monitor Mode — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -8-32 8.4.4 Monitor Display of Reference Pulse Counter and Feedback Pulse Counter — — — — — — — — — — — — -8-33
8.4.5Allowable Maximum Motor Speed for Dividing Ratio Monitor (For the software version 32 or later) 8-34
8.4.6 Hall Sensor Signal Monitor (For the software version 32 or later) — — — — — — — — — — — — — — — — — — — -8-35
9
Operation
9.1 Trial Operation — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-4 9.2 Trial Operation Using SERVOPACK Internal References — — — — — — — — — — — — — — — — — 9-6
9.2.1 SERVOPACK Setup Procedure — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-6 9.2.2 Setup Procedure Using Linear Servomotors with Hall Sensors — — — — — — — — — — — — — — — — — — — — — — -9-6 9.2.3 Setup Procedure Using Linear Servomotors without Hall Sensors- — — — — — — — — — — — — — — — — — — -9-12
|
9.3 Trial Operation for Linear Servomotor without Load from Host |
|
|
Reference — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
9-22 |
9.3.1 Servo ON Command from the Host — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-22 9.3.2 Operating Procedure in Speed Control Mode (Pn000 = n. 0 )- — — — — — — — — — — — — — — — — — — -9-24 9.3.3 Operating Procedure in Position Control Mode (Pn000 = n. 1 ) — — — — — — — — — — — — — — — — — -9-26
9.4 Trial Operation with the Linear Servomotor Connected to the Machine — — — — — — 9-28 9.5 Control Mode Selection- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-29 9.6 Setting Common Basic Functions — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-30
9.6.1 Setting the Servo ON Signal — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-30 9.6.2 Switching the Linear Servomotor Movement Direction — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-31 9.6.3 Setting the Overtravel Limit Function — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-32 9.6.4 Selecting the Stopping Method After Servo OFF — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-34 9.6.5 Instantaneous Power Loss Settings — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-35 9.6.6 Motor Maximum Speed (For the software version 32 or later) — — — — — — — — — — — — — — — — — — — — — — -9-35
9.7 Operating Using Speed Control with Analog Reference — — — — — — — — — — — — — — — — — 9-36
9.7.1 Setting Parameters — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-36 9.7.2 Setting Input Signals — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-37 9.7.3 Adjusting Offset — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-38 9.7.4 Soft Start — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-41 9.7.5 Speed Reference Filter — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-41 9.7.6 Using the Zero Clamp Function — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-41 9.7.7 Encoder Signal Output — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-43 9.7.8 Speed Coincidence Output — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-46
9.8 Operating Using Position Control — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-47
9.8.1 Setting Parameters — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-47
9.8.2 Setting the Electronic Gear — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-49
9.8.3 Position Reference — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -9-52
xviii

9.8.4 Smoothing — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-55
9.8.5 Positioning Completed Output Signal — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-57
9.8.6 Positioning Near Signal — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-58
9.8.7 Reference Pulse Inhibit Function (INHIBIT) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-59
9.9 Operating Using Force Control- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-60
9.9.1 Setting Parameters — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-60 9.9.2 Force Reference Input — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-60 9.9.3 Adjusting the Force Reference Offset — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-61 9.9.4 Limiting Linear Servomotor Speed during Force Control — — — — — — — — — — — — — — — — — — — — — — — — — — 9-63
9.10 Operating Using Speed Control with an Internally Set Speed — — — — — — — — — — — — 9-65
9.10.1 Setting Parameters — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-65 9.10.2 Input Signal Settings — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-66 9.10.3 Operating Using an Internally Set Speed — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-66
9.11 Limiting Force- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-68
9.11.1 Internal Force Limit (Limiting Maximum Output Force)- — — — — — — — — — — — — — — — — — — — — — — — — — — 9-68 9.11.2 External Force Limit (Output Force Limiting by Input Signals)- — — — — — — — — — — — — — — — — — — — — — 9-69 9.11.3 Force Limiting Using an Analog Voltage Reference- — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-71 9.11.4 Force Limiting Using an External Force Limit and Analog Voltage Reference- — — — — — — — — — — 9-72 9.11.5 Checking Output Force Limiting during Operation — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-73
9.12 Control Mode Selection — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-74
9.12.1 Setting Parameters — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-74
9.12.2 Switching the Control Mode — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-74
9.13 Other Output Signals- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-76
9.13.1 Servo Alarm Output (ALM) and Alarm Code Output (ALO1, ALO2, ALO3) — — — — — — — — — — — — 9-76 9.13.2 Warning Output (/WARN) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-77 9.13.3 Running Output Signal (/TGON) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-77 9.13.4 Servo Ready (/S-RDY) Output — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 9-78
10
Adjustments
10.1 Autotuning — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-2
10.1.1 Servo Gain Adjustment Methods- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-2
10.1.2 List of Servo Adjustment Functions — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-3
10.2 Online Autotuning — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-5
10.2.1 Online Autotuning — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-5 10.2.2 Online Autotuning Procedure — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-6 10.2.3 Selecting the Online Autotuning Execution Method — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-7 10.2.4 Machine Rigidity Setting for Online Autotuning — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-8 10.2.5 Method for Changing the Machine Rigidity Setting — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-9 10.2.6 Saving the Results of Online Autotuning — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-10 10.2.7 Procedure for Saving the Results of Online Autotuning — — — — — — — — — — — — — — — — — — — — — — — — — -10-11
xix

10.3 Manual Tuning — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-12
10.3.1 Explanation of Servo Gain — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-12
10.3.2 Servo Gain Manual Tuning — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-13
10.3.3 Position Loop Gain — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-13
10.3.4 Speed Loop Gain — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-14
10.3.5 Speed Loop Integral Time Constant — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-14
10.4 Servo Gain Adjustment Functions — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-15
10.4.1 Feed-forward Reference — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-15
10.4.2 Force Feed-forward — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-16
10.4.3 Speed Feed-forward — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-17
10.4.4 Proportional Control Operation (Proportional Operation Reference)- — — — — — — — — — — — — — — — — 10-18
10.4.5 Using the Mode Switch (P/PI Switching) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-19
10.4.6 Setting the Speed Bias — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-22
10.4.7 Speed Feedback Filter — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-22
10.4.8 Speed Feedback Compensation- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-23
10.4.9 Switching Gain Settings- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-25
10.4.10 Force Reference Filter- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-26
10.5 Analog Monitor — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 10-29
11
Inspection, Maintenance, and Troubleshooting
11.1 Troubleshooting — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 11-2
11.1.1 Alarm Display Table- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 11-2 11.1.2 Warning Display — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 11-4 11.1.3 Alarm Display Table when the Application Module is Used — — — — — — — — — — — — — — — — — — — — — — — — 11-5 11.1.4 Warning Display Table when the Application Module is Used — — — — — — — — — — — — — — — — — — — — — — 11-6 11.1.5 Troubleshooting of Alarm and Warning — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 11-7 11.1.6 Troubleshooting for Malfunction without Alarm Display — — — — — — — — — — — — — — — — — — — — — — — — — — 11-17
11.2 Inspection and Maintenance — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 11-22
11.2.1 Linear Servomotor Inspection- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 11-22
11.2.2 SERVOPACK Inspection — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 11-22
11.2.3 Parts Replacement Schedule — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 11-23
12
Appendix
12.1 Linear Servomotor Capacity Selection Examples- — — — — — — — — — — — — — — — — — — — — 12-2
12.2 Calculating the Required Capacity of Regenerative Resistors — — — — — — — — — — — — 12-4
12.2.1 Simple Calculation — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -12-4
12.2.2 Calculating the Regenerative Energy — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -12-7
xx
![]()
12.3 Connection to Host Controller — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 12-16
|
12.3.1 Example of Connection to MP2200/MP2300 2-axes Motion Module SVA-01 — — — — — — — — — — |
12-16 |
|
|
12.3.2 |
Example of Connection to OMRON’s Motion Control Unit — — — — — — — — — — — — — — — — — — — — — — — |
12-17 |
|
12.3.3 |
Example of Connection to OMRON’s Position Control Unit — — — — — — — — — — — — — — — — — — — — — — |
12-18 |
12.3.4 Example of Connection to OMRON’s Position Control Unit C500-NC221 (SERVOPACK in Speed
|
Control Mode)- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
12-19 |
12.3.5 Example of Connection to OMRON’s Position Control Unit C500-NC112 (SERVOPACK in Posi-
|
tion Control Mode)- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
12-20 |
|
|
12.3.6 |
Example of Connection to Mitsubishi’s AD72 Positioning Unit |
|
|
(SERVOPACK in Speed Control Mode) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
12-21 |
|
|
12.3.7 |
Example of Connection to Mitsubishi’s AD75 Positioning Unit |
|
|
(SERVOPACK in Position Control Mode)- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
12-22 |
12.4 List of Parameters- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 12-23
12.4.1 Utility Functions List- — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 12-23
12.4.2 List of Parameters — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 12-24
12.4.3 Monitor Modes — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 12-40
12.5 Parameter Recording Table — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 12-41
INDEX
Revision History
xxi

xxii

1
1
Outline
1.1 Checking Products — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -1-2
1.1.1 Check Items — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-2
1.1.2 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-2
1.1.3 SERVOPACKs — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-3
1.1.4 Serial Converter Units — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-4
1.2 Product Part Names — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -1-5
1.2.1 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-5
1.2.2 SERVOPACKs — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-6
|
1.3 Examples of Servo System Configurations — — — — — — — — — — — — — — — — — — — — — — |
-1-8 |
|
1.3.1 Single-phase, 200 V Main Circuit — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
— 1-8 |
|
1.3.2 Three-phase, 200 V Main Circuit — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
— 1-9 |
|
1.3.3 Three-phase, 400 V Main Circuit — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
1-10 |
1.4 Applicable Standards — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-11
1.4.1 North American Safety Standards (UL, CSA) — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-11
1.4.2 CE Marking — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 1-11
1-1
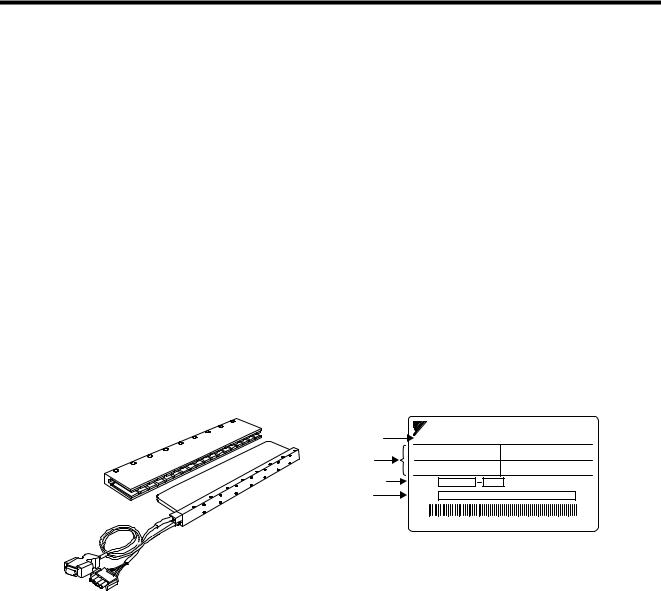
1 Outline
1.1.1 Check Items
1.1Checking Products
1.1.1Check Items
Check the following items when the products are delivered.
|
Check Items |
Comments |
|
Are the delivered products the ones |
Check the model numbers marked on the nameplates on the linear |
|
that were ordered? |
servomotor and SERVOPACK. (Refer to the descriptions of model |
|
numbers in the following section.) |
|
|
Is there any damage? |
Check the overall appearance, and check for damage or scratches that |
|
may have occurred during shipping. |
If any of the above items are faulty or incorrect, contact your Yaskawa representative or the dealer from whom you purchased the products.
1.1.2 Linear Servomotors
The location of the nameplate varies depending on the model of the linear servomotor. The nameplate is affixed on both the coil assembly and the magnetic way.
(1) Coreless SGLGW and SGLGM Linear Servomotors
y Coil assembly and Magnetic way
|
Nameplate |
|||||
|
Servomotor |
CORELESS LINEAR SERVO MOTOR |
||||
|
SGLGW-40A140B |
|||||
|
model |
|||||
|
W |
94 |
A |
0.8 |
||
|
Ratings |
|||||
|
N |
47 |
Ins. |
B |
||
|
Order No. |
O/N |
||||
|
Serial No. |
S/N |
YASKAWA ELECTRIC CORPORATION JAPAN
1-2
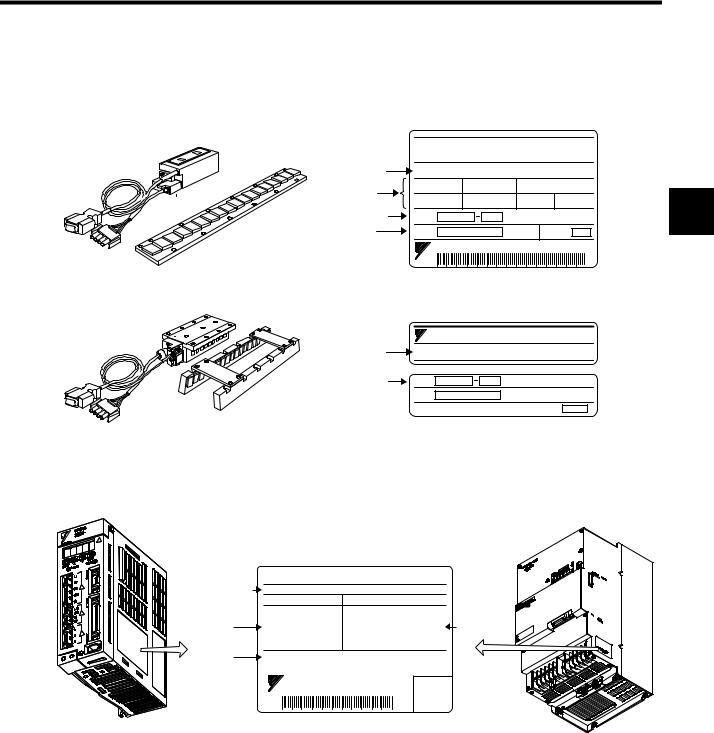
1.1 Checking Products
(2)SGLFW and SGLFM Linear Servomotors with F-type Iron Core and SGLTW and SGLTM Linear Servomotors with T-type Iron Core
|
y SGLFW and SGLFM |
y Coil assembly |
Nameplate |
|||||
|
Linear SERVO MOTOR |
|||||||
|
Servomotor |
TYPE |
SGLFW-35A120A |
|||||
|
model |
200 |
W |
80 |
N |
2.5 m/s |
||
|
Ratings |
|||||||
|
1.3 |
A |
200 |
V |
ins.B |
1 |
||
|
Order No. |
O/N |
||||||
|
Serial No. |
S/N |
DATE |
|||||
|
YASKAWA ELECTRIC MADE IN JAPAN |
|||||||
|
y SGLTW and SGLTM |
y Magnetic way |
Nameplate |
|||||
|
YASKAWA |
|||||||
|
Servomotor |
TYPE: |
SGLFM-20756A |
|||||
|
model |
Order No.
Serial No.
Note: The location of the nameplate varies depending on the model and capacity of the linear servomotor.
1.1.3 SERVOPACKs
|
y SGDH for 50 W to 5.0 kW |
y SGDH for 7.5 kW |
SERVOPACK
|
SERVOPACK |
MODEL |
SGDH-30AE |
||||
|
model |
AC-INPUT |
AC-OUTPUT |
||||
|
VOLTS |
200-230 |
VOLTS |
0-230 |
Applicable |
||
|
Applicable |
Hz |
50/60 |
PHASE |
3 |
motor |
|
|
PHASE |
3 |
AMPS |
24.8 |
|||
|
power supply |
capacity |
|||||
|
AMPS |
18.6 |
KU (MP) |
3.0 (4.0) |
|||
|
Serial |
S/N |
412808-15-1 |
||||
|
number |
YASKAWA ELECTRIC |
|||||
|
MADE IN JAPAN |
1-3
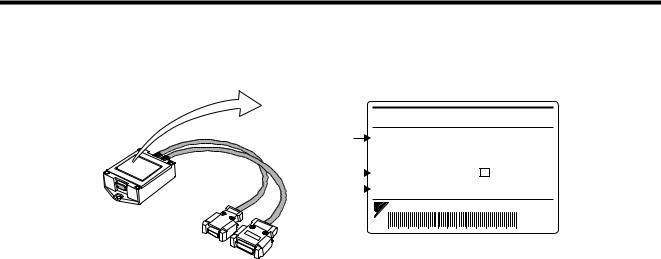
1 Outline
1.1.4Serial Converter Units
1.1.4Serial Converter Units
Nameplate
Serial SERIAL CONVERTER
converter MODEL JZDP-D006-156 model
For : —
|
Order No. |
O/N |
— |
— |
|||||||||
|
Serial No. |
S/N |
|||||||||||
YASKAWA ELECTRIC CORPORATION
JAPAN
1-4
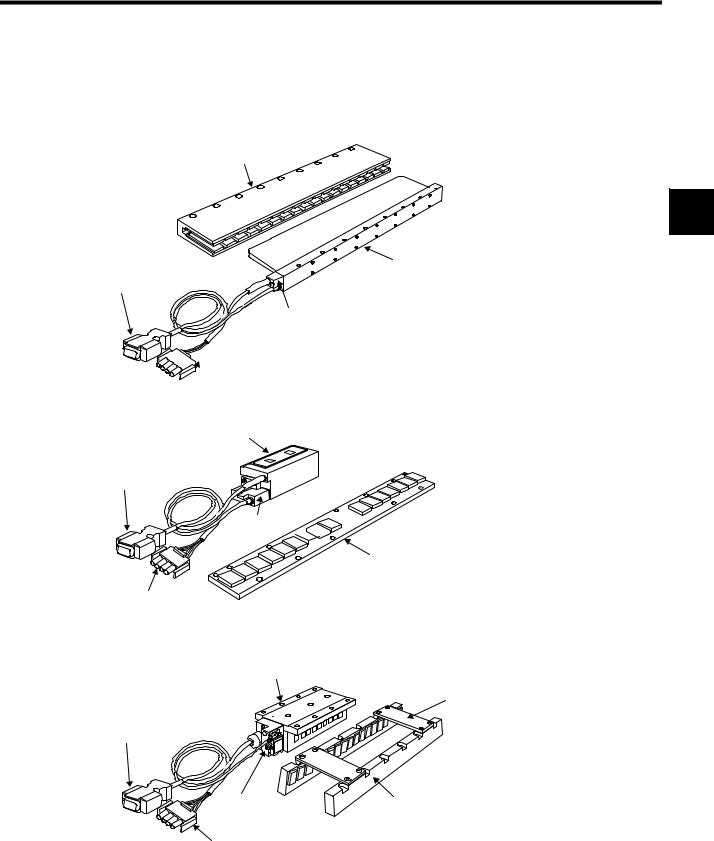
1.2 Product Part Names
1.2Product Part Names
1.2.1Linear Servomotors
(1)Coreless SGLGW and SGLGM
Magnetic way
1
Coil assembly
Hall sensor cable
Hall sensor unit

 Main circuit cable for linear servomotor
Main circuit cable for linear servomotor
(2) SGLFW and SGLFM With F-type Iron Core
Coil assembly
Hall sensor cable
Hall sensor 
 unit
unit 
Magnetic way
Main circuit cable for linear servomotor
(3) SGLTW and SGLTM With T-type Iron Core
Coil assembly
Spacer for installation
Hall sensor cable
|
Hall sensor unit |
Magnetic way |
Main circuit cable for linear servomotor
1-5
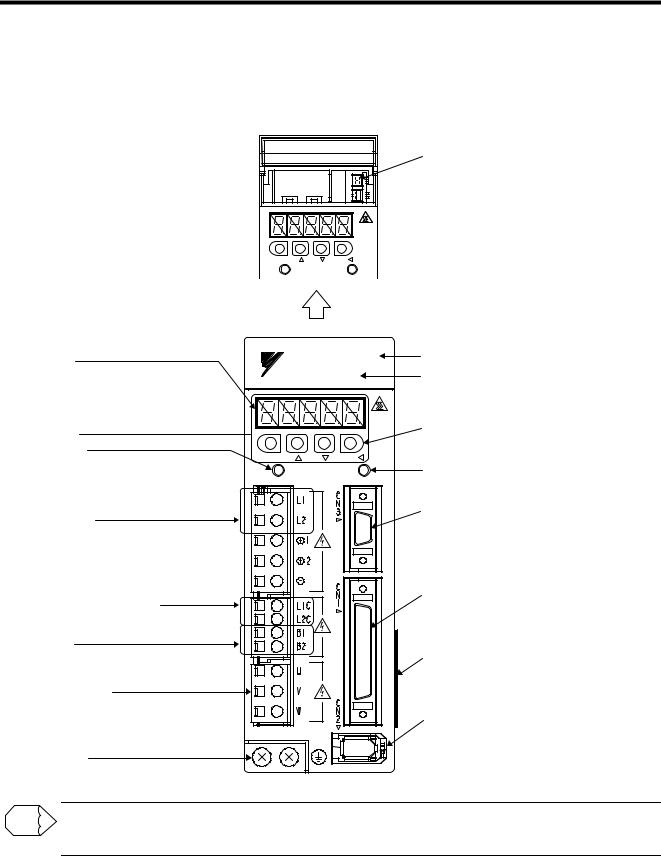
1 Outline
1.2.2 SERVOPACKs
1.2.2SERVOPACKs
(1)SGDH for 50 W to 5.0 kW
With the front cover open
|
MODE/SET |
DATA/ |
|
CHARGE |
POWER |
CN5 Analog monitor connector
Used to monitor motor speed, force reference, and other values through a special cable.
Refer to 6.8.3 Cables for Analog Monitor or 10.5 Analog Monitor.
|
Panel display |
YASKAWA SERVOPACK |
Front cover |
|
|
YASKAWA SGDH- |
|||
|
5-digit, 7-segment LED used to display |
SERVOPACK model |
||
|
SERVOPACK status, alarm status, and other |
|||
|
values when parameters are input. |
Refer to 2.3 SERVOPACK Model |
||
|
Designations. |
|||
|
Refer to 8.1.2 Key Names and Functions. |
|||
|
Panel operator |
Panel keys |
||
|
Used to set parameters. |
|||
|
Charge indicator |
|||
|
MODE/SET |
DATA/ |
Refer to 8.1.2 Key Names and Functions. |
|
|
Lights when the main circuit power supply is |
|||
|
Power ON indicator |
|||
|
ON and stays lit as long as the main circuit power |
CHARGE |
POWER |
|
|
supply capacitor remains charged. Therefore, |
Lights when the control power supply is ON. |
||
|
do not touch the SERVOPACK even after the power |
|||
|
supply is turned OFF if the indicator is lit. |
CN3 Connector for personal computer monitoring |
||
|
Main circuit power |
|||
|
and digital operator |
|||
|
supply terminals |
|||
|
Used to communicate with a personal computer |
|||
|
Used for main circuit power supply input. |
or to connect a digital operator. |
||
|
Refer to 7.2 Wiring Main Circuit. |
Refer to 6.8.1 Cables for Connecting Personal |
||
|
Computer and 6.8.2 Digital Operator. |
|||
|
Control power supply terminals |
CN1 I/O signal connector |
||
|
Used for reference input signals and |
|||
|
Used for control power supply input. |
sequence I/O signals. |
||
|
Refer to 7.2 Wiring Main Circuit. |
Refer to 7.4 Examples of I/O Signal Connections. |
||
|
Regenerative |
|||
|
resistor connecting terminals |
Nameplate (side view) |
||
|
Used to connect external regenerative resistors. |
Indicates the SERVOPACK model and ratings. |
||
|
Refer to 7.6 Connecting Regenerative Resistors. |
Refer to 1.1.3 SERVOPACKs. |
||
|
Servomotor terminals |
|||
|
Connects to the servomotor power line. |
|||
|
Refer to 7.2 Wiring Main Circuit. |
CN2 Encoder connector |
||
|
Connects to the serial converter unit. |
|||
|
Refer to 7.3 Wiring Encoders. |
Ground terminal
Be sure to connect to protect against electrical shock.
Refer to 7.2 Wiring Main Circuit.
INFO Connecting terminal of DC Reactor
Connecting terminal of DC Reactor
For connecting a reactor, refer to 7.5.5 DC Reactor for Harmonic Suppression.
1-6
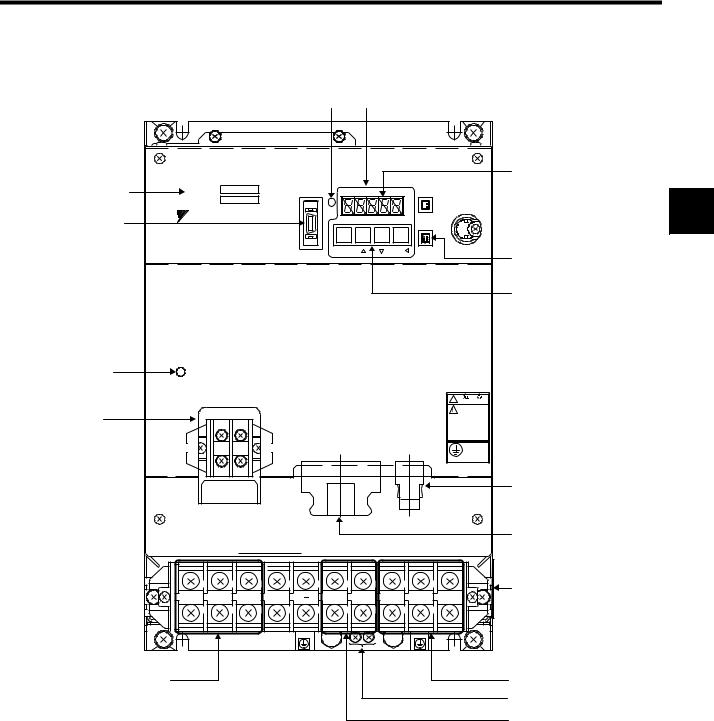
1.2 Product Part Names
|
(2) SGDH for 7.5 kW |
||||||
|
Power indicator |
Panel operator |
|||||
|
SERVOPACK |
200V |
Panel display |
||||
|
SERVOPACK model |
SGDH- |
1 |
||||
|
Ver. |
||||||
|
YASKAWA |
POWER |
CN8 |
||||
|
CN3 Connector for |
||||||
|
personal computer |
||||||
|
monitoring and |
CN3 |
MODE/SET |
DATA/ |
CN5 |
BATTERY |
|
|
digital operator |
CN5 Analog |
|||||
|
monitor connector |
||||||
|
Panel switch |
||||||
|
Charge indicator |
CHARGE |
|||||
|
! WARNING |
||||||
|
Control circuit |
||||||
|
terminal |
||||||
|
L1C |
L2C |
CN1 |
CN2 |
|||
|
CN2 Encoder connector |
||||||
|
CN1 I/O signal connector |
|
L1 |
L2 |
L3 |
+ |
B1 |
B2 |
U |
V |
Nameplate (side view) |
|
|
W |
|||||||||
|
Main circuit power supply |
Servomotor terminals: U, V, W |
||||||||
|
terminals: L1, L2, L3 |
Ground terminal |
||||||||
|
Regenerative resistor |
|||||||||
|
connecting terminals: B1, B2 |
*Control circuit terminal and regenerative resistor connecting terminals differ the position of the terminal block by the SERVOPACK model.
Refer to Chapter 4 SERVOPACK Specifications and Dimensional Drawings for details.
SERVOPACK model SGDH-75AE: Refer to 4.7.7 Three-phase 200 V: 7.5 kW (75AE).
SERVOPACK model SGDH-75DE: Refer to 4.7.8 Three-phase 400 V: 7.5 kW (75DE).
1-7
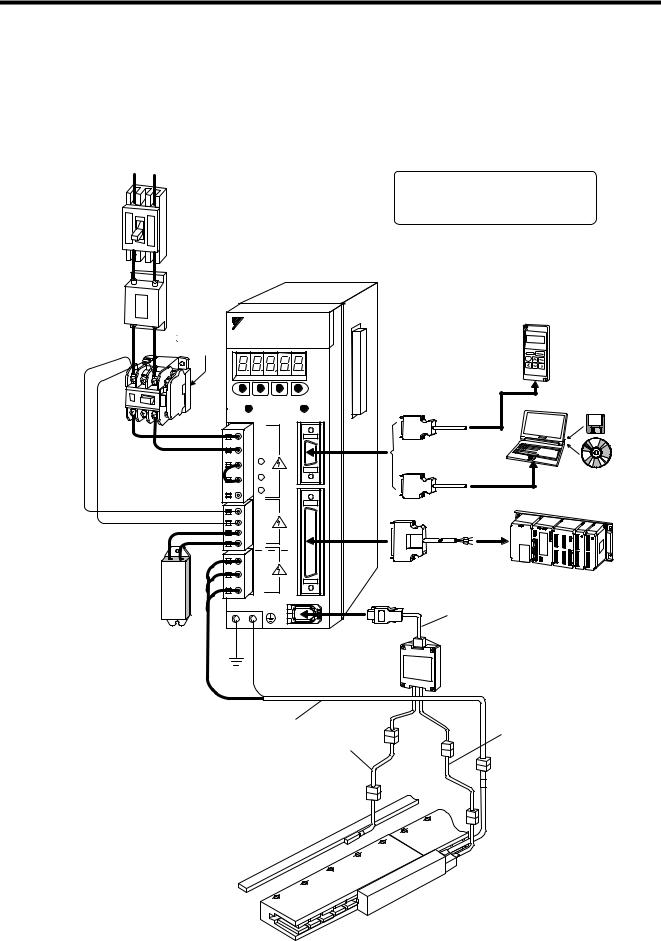
1 Outline
1.3.1 Single-phase, 200 V Main Circuit
1.3 Examples of Servo System Configurations
This section describes examples of basic servo system configuration.
1.3.1 Single-phase, 200 V Main Circuit
Power supply
Single-phase 200 VAC
R T
Molded-case
circuit breaker (MCCB)
Protects the power supply line by shutting the circuit OFF when an overcurrent is detected.
Note : To connect a DC reactor, refer to
7.5.5 DC Reactor for Harmonic Suppression.
|
(Refer to 2.6.2) |
SGDHAE |
||||
|
Magnetic |
SERVOPACK |
||||
|
Noise filter |
|||||
|
contactor |
|||||
|
Eliminates external |
Turns the servo ON |
||||
|
noise from the power |
and OFF. |
||||
|
line. |
Install a surge |
YASKAWA |
200V |
||
|
(Refer to 2.6.3) |
suppressor. |
SERVOPACK |
Digital |
||
|
Refer to |
SGDH- |
||||
|
operator |
|||||
|
2.6.3) |
(Refer to 2.6.1.) |
||||
|
MODE/SET |
DATA/ |
Connection cable |
Personal computer |
||
|
CHARGE |
POWER |
for digital operator |
|||
|
L1 |
C |
||||
|
L2 |
N |
||||
|
3 |
Connection cable |
||||
|
+ 1 |
|||||
|
for personal computer |
|||||
|
+ 2 |
(Refer to 2.6.1.) |
||||
|
— |
C |
||||
|
L1C |
I/O signal cable |
Host controller |
|||
|
N |
|||||
|
L2C |
1 |
(Refer to 2.6.1.) |
|||
|
B1 |
|||||
|
B2 |
|||||
|
Regenerative |
U |
||||
|
resistor |
|||||
|
V |
|||||
|
Connect an external |
|||||
|
regenerative resistor |
W |
C |
|||
|
to terminals B1 and B2 |
N |
||||
|
if the regenerative |
|||||
|
capacity is insufficient. |
Connection cable |
||||
|
(Refer to 2.6.4.) |
|||||
|
for serial converter unit |
|||||
|
(Refer to 2.5.) |
|||||
|
Serial converter unit |
|||||
|
(Refer to 2.4.) |
|
Main circuit |
Connection cable |
|
|
linear servomotor |
||
|
for hall sensor |
||
|
(Refer to 2.5.) |
||
|
(Refer to 2.5.) |
||
|
(Refer to 2.5.) |
Linear scale (To be provided by
users.)
(Refer
 Hall sensor unit
Hall sensor unit
Coreless Linear Servomotor
1-8
![]()
1.3 Examples of Servo System Configurations
1.3.2 Three-phase, 200 V Main Circuit
Power supply Three-phase 200 VAC
R S T
Molded-case circuit breaker (MCCB)
Protects the power supply line by shutting the circuit OFF when an overcurrent is detected.
(Refer to 2.6.2.)
Noise filter
Eliminates external noise from the power line.
(Refer to 2.6.3.)
|
*1: The positive terminal |
for the main circuit is only available for use |
||||
|
in the three-phase (200 VAC, 7.5 kW) SERVOPACKs. |
|||||
|
Do not use the positive terminals 1 or 2. |
|||||
|
*2: Before connecting an external regenerative resistor to |
|||||
|
the SERVOPACK, be sure to disconnect the lead between terminals |
|||||
|
B2 and B3. |
|||||
|
1 |
|||||
|
*3: To connect a DC reactor, refer to 7.5.5 DC Reactor for Harmonic |
|||||
|
Suppression. |
|||||
|
Magnetic |
SGDHAE |
Digital |
|||
|
contactor |
SERVOPACK |
operator |
|||
|
(Refer to 2.6.1.) |
|||||
|
Turns the servo |
|||||
|
ON and OFF. |
|||||
|
Install a surge |
Connection cable for |
||||
|
suppressor. |
digital operator |
||||
|
(Refer to |
YASKAWA |
200V |
Personal computer |
||
|
SERVOPACK |
|||||
|
2.6.3.) |
SGDH- |
||||
|
Connection cable for |
|||||
|
CHARGE |
POWER |
personal computer |
|||
|
MODE/SET |
DATA/ |
||||
|
L1 |
C |
(Refer to 2.6.1.) |
|||
|
L2 |
N |
||||
|
3 |
|||||
|
L3 |
Host controller |
||||
|
*1 |
1 |
I/O signal cable |
|||
|
2 |
C |
||||
|
*3 |
|||||
|
1 |
|||||
|
N |
|||||
|
L1C |
|||||
|
L2C |
|||||
|
B1 |
|||||
|
B2 |
|||||
|
Regenerative |
*2 |
B3 |
N |
(Refer to 2.6.1.) |
|
|
U |
|||||
|
resistor |
C |
||||
|
V |
2 |
||||
|
Connect an external |
W |
||||
|
regenerative resistor |
Connection cable for |
||||
|
to terminals B1 and B2 |
|||||
|
if the regenerative |
serial converter unit |
||||
|
capacity is insufficient. |
|
(Refer to 2.6.4.) |
(Refer to 2.5.) |
Serial converter unit
(Refer to 2.4.)
|
Main circuit cable for |
|||
|
linear servomotor |
Encoder |
Connection cable |
|
|
(Refer to 2.5.) |
cable |
||
|
for hall sensor |
|||
|
(Refer to 2.5.) |
|||
|
(Refer to 2.5.) |
|||
Linear scale
(To be provided by users)
(Refer
servomotor with core
1-9

1 Outline
1.3.3Three-phase, 400 V Main Circuit
1.3.3Three-phase, 400 V Main Circuit
Power supply Three-phase 400 VAC
R S T
Molded-case circuit breaker (MCCB)
Protects the power supply line by shutting the circuit OFF when an overcurrent is detected.
(Refer to 2.6.2.)
Noise filter
*1: Use a 24 VDC power supply (To be provided by users).
*2: Before connecting an external regenerative resistor to
the SERVOPACK, be sure to disconnect the lead between terminals B2 and B3.
*3: To connect a DC reactor, refer to 7.5.5 DC Reactor for Harmonic Suppression.
|
Eliminates external |
||||||
|
noise from the power |
||||||
|
line. |
||||||
|
(Refer to 2.6.3.) |
Digital |
|||||
|
Magnetic |
SGDHDE |
operator |
||||
|
(Refer to 2.6.1.) |
||||||
|
contactor |
SERVOPACK |
|||||
|
Turns the servo |
||||||
|
ON and OFF. |
||||||
|
Install a surge |
Connection cable |
|||||
|
suppressor. |
for digital operator |
|||||
|
Refer to |
YASKAWA |
200V |
Personal computer |
|||
|
SERVOPACK |
||||||
|
2.6.3.) |
SGDH- |
|||||
|
Connection cable |
||||||
|
CHARGE |
POWER |
for personal computer |
||||
|
MODE/SET |
DATA/ |
|||||
|
L1 |
C |
(Refer to 2.6.1.) |
||||
|
L2 |
N |
|||||
|
3 |
||||||
|
L3 |
Host controller |
|||||
|
1 |
I/O signal cable |
|||||
|
*3 |
2 |
C |
||||
|
N |
||||||
|
24V |
1 |
|||||
|
0V |
||||||
|
B1 |
||||||
|
*1 |
B2 |
|||||
|
*2 |
B3 |
C |
(Refer to 2.6.1.) |
|||
|
+ |
− |
U |
||||
|
N |
||||||
|
2 |
||||||
|
DC power |
V |
|||||
|
supply |
W |
|||||
|
(24 VDC) |
Connection cable for |
|||||
|
serial convertr unit |
||||||
|
(Refer to 2.5.) |
Regenerative resistor
Connect an external regenerative resistor to terminals B1 and B2
if the rgenerative capacity is insufficient.
(Refer to 2.6.4.)
|
Serial convertr unit |
|||
|
(Refer to 2.4.) |
|||
|
Main circuit cable for |
|||
|
linear servomotor |
Encoder |
Connection cable |
|
|
(Refer to 2.5.) |
cable |
||
|
for hall sensor |
|||
|
(Refer to 2.5.) |
|||
|
(Refer to 2.5.) |
|||
Linear scale
(To be provided by
users.)
(Refer
servomotor wirh core
1-10

1.4 Applicable Standards
1.4 Applicable Standards
Σ-II Series servodrives conform to the following overseas standards.
1.4.1 North American Safety Standards (UL, CSA)
|
C |
U |
L US |
||||
|
R |
C |
US |
1 |
|||
|
LISTED |
||||||
|
Model |
UL 1 Standards (UL File No.) CSA 2 Standards |
Certifications |
||||
|
SERVOPACK • SGDH |
UL508C(E147823) |
CSA C22.2 |
UL |
|||
|
No.14 |
||||||
*1. Underwriters Laboratories Inc.
*2. Canadian Standards Association.
1.4.2CE Marking
|
Model |
Low Voltage |
EMC Directive |
Certifications |
|||
|
Directive |
EMI |
EMS |
||||
|
EN55011 |
EN50082-2 |
TÜV PS |
||||
|
SERVOPACK |
• SGDH |
EN50178 |
or |
|||
|
class A group 1 |
||||||
|
EN61000-6-2 |
||||||
|
* TÜV Product Services GmbH |
||||||
|
Note: For installation conditions, refer to 7.5.2 Wiring for Noise Control. |
||||||
|
Because SERVOPACKs and linear servomotors are built-in type, reconfirmation is |
||||||
|
required after being installed in the final product. |
1-11

1 Outline
1.4.2 CE Marking
1-12

2
Selections
2
2.1 Linear Servomotor Model Designation — — — — — — — — — — — — — — — — — — — — — — — — — -2-2
2.1.1 Coil Assembly — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-2
2.1.2 Magnetic Way — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-2
2.2 SERVOPACK Model Designation — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -2-3
2.3 S-II Series SERVOPACKs and Applicable Linear Servomotors — — — — — — — — -2-4
2.4 Serial Converter Units Models — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -2-6
2.5 Selecting Cables — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -2-7
2.6 Selecting Peripheral Devices — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — -2-9
2.6.1 Special Options — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-9
2.6.2 Molded-case Circuit Breaker and Fuse Capacity — — — — — — — — — — — — — — — — — — — — — — — — — — 2-11
2.6.3 Noise Filters and DC Reactors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-12
2.6.4 Regenerative Resistors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-13
2.6.5 Linear Scales — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 2-14
2-1

2 Selections
2.1.1 Coil Assembly
2.1 Linear Servomotor Model Designation
This section describes how to check the model and ratings of the linear servomotor. The alphanumeric codes after SGL — indicate the specifications.
2.1.1 Coil Assembly
SGL G W 40 A 140 A P
|
Linear Σ Series |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Linear servomotor |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Servomotor Model |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Code |
Specifications |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
G |
Coreless |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
F |
F-type iron core |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
T |
T-type iron core |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
W : Coil assembly |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Hall Sensor/Cooling |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Magnet height |
Code |
Specifications |
Applicable models |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
P |
With hall sensor (standard) |
All motor models |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Voltage |
C |
Forced cooling |
SGLGW-40A, -60A, -90A |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
A |
200 VAC |
H |
With hall sensor and forced cooling |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
D |
400 VAC |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
− |
Without hall sensor |
All motor models |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Design revision order |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
A,B,C |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
2.1.2 Magnetic Way |
Length of coil assembly |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
SGL G M |
40 225 A C |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Options |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Linear Σ Series |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Linear servomotor |
Code |
Specifications |
Applicable Model |
|||||||||||||||||||||||||||||||||||||||||||||||||||
|
− |
Standard |
All motor models |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Model |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
With magnet |
Only for all Iron-core types |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Code |
Specifications |
C |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
protection cover |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
G |
Coreless |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
F |
F-type iron core |
— M |
High thrust force |
Only for the following coreless types |
||||||||||||||||||||||||||||||||||||||||||||||||||
|
T |
T-type iron core |
SGLGM-40, -60 |
||||||||||||||||||||||||||||||||||||||||||||||||||||
|
M : Magnetic way |
Only for the T-type iron core types |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
With base and |
SGLTM-20, -35, -40, -80 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Y |
Note: The magnetic ways with base for |
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
magnetic cover |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
SGLTM-35 H, -50 H |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Magnet height |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
are not available. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Design revision order |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
A,B,C |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Note: The coreless linear |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
servomotor has |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
revision CT. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||
Length of magnetic way
2-2

2.2 SERVOPACK Model Designation
2.2 SERVOPACK Model Designation
Select the SERVOPACK according to the applied linear servomotor.
SGDH — 10 A E
|
Σ-II Series SGDH |
||||||||||||||||||||||||
|
SERVOPACK |
||||||||||||||||||||||||
|
Rated Output of Applicable Servomotor (kW) |
||||||||||||||||||||||||
|
Code |
Rated Output |
Code |
Rated Output |
|||||||||||||||||||||
|
2 |
||||||||||||||||||||||||
|
A5 |
0.05 |
10 |
1.0 |
|||||||||||||||||||||
|
01 |
0.10 |
15 |
1.5 |
|||||||||||||||||||||
|
02 |
0.20 |
20 |
2.0 |
|||||||||||||||||||||
|
04 |
0.40 |
30 |
3.0 |
|||||||||||||||||||||
|
05 |
0.45 |
50 |
5.0 |
|||||||||||||||||||||
|
08 |
0.75 |
75 |
7.5 |
|||||||||||||||||||||
|
Model (Fixed) |
||||||||||||||||||||||||
|
Power Supply Voltage |
||||||||||||||||||||||||
|
Code |
Remarks |
|||||||||||||||||||||||
|
Code |
Voltage |
|||||||||||||||||||||||
|
For force, speed, and position control |
||||||||||||||||||||||||
|
A |
Single/Three-phase, 200V |
E |
||||||||||||||||||||||
|
Applicable for various application modules |
||||||||||||||||||||||||
|
D |
Three-phase, 400V |
|||||||||||||||||||||||
2-3

2 Selections
2.3 Σ-II Series SERVOPACKs and Applicable Linear Servomotors
|
Σ-II Series SGDH SERVOPACK |
||||||
|
Linear Σ Series Linear Servomotor |
Single-phase |
Three-phase |
Three-phase |
|||
|
200 VAC |
200 VAC |
400 VAC |
||||
|
30A050C |
A5AE |
− |
− |
|||
|
30A080C |
01AE |
− |
− |
|||
|
40A140C |
01AE |
− |
− |
|||
|
SGLGW |
When a |
40A253C |
02AE |
− |
− |
|
|
(Coreless) |
40A365C |
04AE |
− |
− |
||
|
Standard- |
||||||
|
force |
60A140C |
02AE |
− |
− |
||
|
Magnetic |
60A253C |
04AE |
− |
− |
||
|
Way is used. |
60A365C |
− |
08AE |
− |
||
|
90A200C |
− |
15AE |
− |
|||
|
90A370C |
− |
20AE |
− |
|||
|
90A535C |
− |
30AE |
− |
|||
|
40A140C |
02AE |
− |
− |
|||
|
When a |
40A253C |
04AE |
− |
− |
||
|
17 models |
40A365C |
− |
05AE |
− |
||
|
High-force |
||||||
|
Magnetic |
60A140C |
02AE |
− |
− |
||
|
Way is used. |
60A253C |
− |
05AE |
− |
||
|
60A365C |
− |
10AE |
− |
|||
|
20A090A |
02AE |
− |
− |
|||
|
20A120A |
02AE |
− |
− |
|||
|
35A120A |
02AE |
− |
− |
|||
|
SGLFW |
35A230A |
− |
05AE |
− |
||
|
(With F-type iron core) |
50A200B |
− |
08AE |
− |
||
|
50A380B |
− |
15AE |
− |
|||
|
1ZA200B |
− |
15AE |
− |
|||
|
1ZA380B |
− |
30AE |
− |
|||
|
35D120A |
− |
− |
05DE |
|||
|
35D230A |
− |
− |
05DE |
|||
|
14 models |
50D200B |
− |
− |
10DE |
||
|
50D380B |
− |
− |
15DE |
|||
|
1ZD200B |
− |
− |
15DE |
|||
|
1ZD380B |
− |
− |
30DE |
2-4

2.3 Σ-II Series SERVOPACKs and Applicable Linear Servomotors
|
Σ-II Series SGDH SERVOPACK |
|||||
|
Linear Σ Series Linear Servomotor |
Single-phase |
Three-phase |
Three-phase |
||
|
200 VAC |
200 VAC |
400 VAC |
|||
|
20A170A |
− |
05AE |
− |
||
|
20A320A |
− |
10AE |
− |
||
|
20A460A |
− |
15AE |
− |
||
|
35A170A |
− |
08AE |
− |
||
|
35A320A |
− |
15AE |
− |
||
|
35A460A |
− |
20AE |
− |
||
|
35A170H |
− |
08AE |
− |
||
|
SGLTW |
35A320H |
− |
15AE |
− |
|
|
(With T-type iron core) |
50A170H |
− |
08AE |
− |
2 |
|
50A320H |
− |
15AE |
− |
||
|
40A400B |
− |
20AE |
− |
||
|
40A600B |
− |
50AE |
− |
||
|
80A400B |
− |
50AE |
− |
||
|
80A600B |
− |
75AE |
− |
||
|
22 models |
35D170H |
− |
− |
10DE |
|
|
35D320H |
− |
− |
20DE |
||
|
50D170H |
− |
− |
10DE |
||
|
50D320H |
− |
− |
20DE |
||
|
40D400B |
− |
− |
30DE |
||
|
40D600B |
− |
− |
50DE |
||
|
80D400B |
− |
− |
50DE |
||
|
80D600B |
− |
− |
75DE |
Note: The model combinations shown in this table are used when the maximum rated force of the applicable linear servomotor is required. To suppress rises in temperature, larger linear servomotors are used in some cases. If so, the SERVOPACK capacity can be lowered if using a motor at a lower force than the rated force. Calculate the required current and select a model with a margin of approximately 20%. An allowance can be made for up to 1/3 of the combined capacity of the linear servomotor and SERVOPACK in the table.
2-5

2 Selections
2.4 Serial Converter Units Models
JZDP D008 001
Serial Converter Unit Model
|
Symbol |
Appearance |
Applicable |
Hall Sensor |
|
|
Linear Scale |
||||
|
D006 |
Made by |
Yes |
||
|
Heidenhain |
||||
|
Made by |
Yes |
|||
|
D008 |
Renishaw |
|||
Applicable Linear Servomotor
|
Servomotor Model |
Symbol |
||||||
|
30A050C |
250 |
||||||
|
30A080C |
251 |
||||||
|
40A140C |
252 |
||||||
|
40A253C |
253 |
||||||
|
SGLGW- |
40A365C |
254 |
|||||
|
(Coreless) |
60A140C |
258 |
|||||
|
When a |
60A253C |
259 |
|||||
|
standard- |
|||||||
|
60A365C |
260 |
||||||
|
force |
|||||||
|
magnetic |
90A200C |
264 |
|||||
|
way is used. |
|||||||
|
90A370C |
265 |
||||||
|
90A535C |
266 |
||||||
|
SGLGW- |
40A140C |
255 |
|||||
|
+ |
|||||||
|
40A253C |
256 |
||||||
|
SGLGM- |
|||||||
|
-M |
40A365C |
257 |
|||||
|
(Coreless) |
|||||||
|
60A140C |
261 |
||||||
|
When a |
|||||||
|
high-force |
60A253C |
262 |
|||||
|
magnetic |
|||||||
|
way is used. |
60A365C |
263 |
|||||
|
20A090A |
017 |
||||||
|
20A120A |
018 |
||||||
|
35A120A |
019 |
||||||
|
35A230A |
020 |
||||||
|
50A200B |
181 |
||||||
|
SGLFW- |
50A380B |
182 |
|||||
|
(Iron core, |
|||||||
|
1ZA200B |
183 |
||||||
|
F-type) |
|||||||
|
1ZA380B |
184 |
||||||
|
35D120A |
211 |
||||||
|
35D230A |
212 |
||||||
|
50D200B |
189 |
||||||
|
50D380B |
190 |
||||||
|
1ZD200B |
191 |
||||||
|
1ZD380B |
192 |
|
Servomotor Model |
Symbol |
||
|
20A170A |
011 |
||
|
20A320A |
012 |
||
|
20A460A |
013 |
||
|
35A170A |
014 |
||
|
35A320A |
015 |
||
|
35A460A |
016 |
||
|
35A170H |
105 |
||
|
35A320H |
106 |
||
|
50A170H |
108 |
||
|
SGLTW- |
50A320H |
109 |
|
|
(Iron core, |
40A400B |
185 |
|
|
T-type) |
|||
|
40A600B |
186 |
||
|
80A400B |
187 |
||
|
80A600B |
188 |
||
|
35D170H |
193 |
||
|
35D320H |
194 |
||
|
50D170H |
195 |
||
|
50D320H |
196 |
||
|
40D400B |
197 |
||
|
40D600B |
198 |
||
|
80D400B |
199 |
||
|
80D600B |
200 |
Note: When using a 400-V winding linear servomotor with a 200-V SERVOPACK, the parameters in the serial converter should be changed. Contact your Yaskawa representatives.
2-6
![]()
2.5 Selecting Cables
|
YASKAWA |
200V |
SERVOPACK |
|
|
SGDH- |
|||
|
SERVOPACK |
|||
|
MODE/SET |
DATA/ |
||
|
CHARGE |
POWER |
||
|
L1 |
C |
||
|
L2 |
N |
||
|
3 |
|||
|
L3 |
|||
|
1 |
|||
|
2 |
|||
|
C |
|||
|
N |
|||
|
L1C |
1 |
||
|
L2 |
|||
|
B1 |
|||
|
B2 |
|||
|
B3 |
C |
||
|
U |
|||
|
N |
|||
|
V |
2 |
CN2 |
|
|
W |
|||
Linear scale (To be provided by users.)
 Hall sensor unit
Hall sensor unit
Linear servomotor
|
Applicable |
Cable |
Refer- |
|||||
|
Name |
Connection |
Linear Servo- |
Cable Type |
Specifications |
|||
|
motor Model |
Length |
ence |
|||||
|
1 m |
JZSP-CLN11-01 |
||||||
|
SGLGW-30,-40 |
3 m |
JZSP-CLN11-03 |
SERVOPACK |
Linear servomotor |
|||
|
5 m |
JZSP-CLN11-05 |
||||||
|
and -60 |
end |
end |
|||||
|
SGLFW-20 |
10 m |
JZSP-CLN11-10 |
|||||
|
SGLFW-35 |
15 m |
JZSP-CLN11-15 |
|||||
|
20 m |
JZSP-CLN11-20 |
||||||
|
1 m |
JZSP-CLN21-01 |
||||||
|
c |
SGLGW-90 |
3 m |
JZSP-CLN21-03 |
SERVOPACK |
Linear servomotor |
||
|
Between SERVO- |
SGLFW-50 and |
5 m |
JZSP-CLN21-05 |
||||
|
Linear Servo- |
end |
end |
6.1 |
||||
|
PACK and linear |
-1Z |
10 m |
JZSP-CLN21-10 |
||||
|
motor Main |
servomotor |
SGLTW-20,-35 |
|||||
|
Circuit Cables |
15 m |
JZSP-CLN21-15 |
|||||
|
and -50 |
|||||||
|
20 m |
JZSP-CLN21-20 |
||||||
|
1 m |
JZSP-CLN39-01 |
||||||
|
3 m |
JZSP-CLN39-03 |
SERVOPACK |
Linear servomotor |
||||
|
SGLTW-40 and |
5 m |
JZSP-CLN39-05 |
end |
end |
|||
|
-80 |
10 m |
JZSP-CLN39-10 |
|||||
|
15 m |
JZSP-CLN39-15 |
||||||
|
20 m |
JZSP-CLN39-20 |
||||||
|
1 m |
JZSP-CLL00-01 |
Serial converter unit |
Linear scale |
||||
|
d |
3 m |
JZSP-CLL00-03 |
|||||
|
Between serial convert- |
All models |
5 m |
JZSP-CLL00-05 |
end |
end |
6.3 |
|
|
Encoder |
|||||||
|
Cables |
er unit and linear scale |
10 m |
JZSP-CLL00-10 |
||||
|
15 m |
JZSP-CLL00-15 |
2-7

2 Selections
|
Applicable |
Cable |
Refer- |
|||||
|
Name |
Connection |
Linear Servo- |
Cable Type |
Specifications |
|||
|
motor Model |
Length |
ence |
|||||
|
1 m |
JZSP-CLP70-01 |
||||||
|
e |
Between SERVO- |
3 m |
JZSP-CLP70-03 |
SERVOPACK |
Serial converter unit |
||
|
Connection |
5 m |
JZSP-CLP70-05 |
end |
end |
|||
|
PACK connector CN2 |
All models |
6.2 |
|||||
|
cables for seri- |
10 m |
JZSP-CLP70-10 |
|||||
|
al converter |
and |
||||||
|
serial converter unit |
15 m |
JZSP-CLP70-15 |
|||||
|
unit |
|||||||
|
20 m |
JZSP-CLP70-20 |
||||||
|
1 m |
JZSP-CLL10-01 |
||||||
|
f |
Between serial convert- |
3 m |
JZSP-CLL10-03 |
Serial converter unit |
Hall sensor unit |
||
|
Connection |
5 m |
JZSP-CLL10-05 |
end |
end |
6.4 |
||
|
er unit and hall sensor |
All models |
||||||
|
cables for hall |
unit |
10 m |
JZSP-CLL10-10 |
||||
|
sensor |
|||||||
|
15 m |
JZSP-CLL10-15 |
Note: A connector is not provided on the linear servomotor end of the main circuit cable, type JZSP- CLN39- . The user must provide the connector on the linear servomotor end. For details on the required connector, refer to 6.1 Linear Servomotor Main Circuit Cables.
2-8

2.6 Selecting Peripheral Devices
2.6Selecting Peripheral Devices
2.6.1Special Options
dDigital operator 
|
YASKAWA |
200V |
|
|
SERVOPACK |
||
|
SGDH- |
||
|
MODE/SET |
DATA/ |
|
|
CHARGE |
POWER |
|
|
L1 |
C |
CN3 |
|
L2 |
N |
|
|
3 |
||
|
L3 |
||
|
1 |
||
|
2 |
||
|
C |
CN1 |
|
|
N |
||
|
L1C |
1 |
|
|
L2 |
||
|
B1 |
||
|
B2 |
||
|
B3 |
C |
|
|
U |
||
|
N |
||
|
V |
2 |
|
|
W |
|
eConnection cable |
Personal |
|
for digital operator |
|
|
computer |
|
|
fConnection cable |
2 |
|
for personal computer |
|
|
c I/O signal cable |
Host controller |
|
YASKAWA |
200V |
|
|
SERVOPACK |
||
|
SGDH- |
||
|
MODE/SET |
DATA/ |
|
|
CHARGE |
POWER |
|
|
L1 |
C |
|
|
L2 |
N |
|
|
3 |
||
|
L3 |
||
|
1 |
||
|
2 |
||
|
C |
||
|
N |
||
|
L1C |
1 |
|
|
L2 |
||
|
B1 |
||
|
B2 |
||
|
B3 |
C |
|
|
U |
||
|
N |
||
|
V |
2 |
|
|
W |
Connector
|
NS100 |
|
S |
|
W |
|
1 |
|
A |
|
R |
|
S |
|
W |
|
2 |
|
C |
|
N |
|
6 |
|
A |
|
C |
|
N |
|
6 |
|
B |
|
C |
|
N |
|
4 |
|
NS115 |
|
S |
|
W |
|
1 |
|
A |
|
R |
|
S |
|
W |
|
2 |
|
C |
|
N |
|
6 |
|
A |
|
C |
|
N |
|
6 |
|
B |
|
C |
|
N |
|
4 |
|
NS300 |
||
|
67 |
8 9 |
X |
|
5 |
0 |
10 |
|
34 |
21 |
|
|
67 |
8 9 |
X |
|
5 |
0 |
1 |
|
34 |
21 |
|
|
7 |
8 9 |
|
|
6 |
D |
|
|
5 |
0 |
R |
|
34 |
21 |
C |
|
N |
||
|
11 |
||
|
M |
||
|
S |
||
|
N |
||
|
S |
CN11
CN6  CN4
CN4
CN4  CN6
CN6
|
MECHATROLINK-I MECHATROLINK-II |
DeviceNet |
PROFIBUS-DP INDEXER |
||
|
I/F Unit |
I/F Unit |
I/F Unit |
I/F Unit |
Module |
|
(NS100) |
(NS115) |
(NS300) |
(NS500) |
(NS600) |
2-9

2 Selections
2.6.1 Special Options
|
Name |
Length |
Type |
Specifications |
Refer- |
||||
|
ence |
||||||||
|
Terminal block and 0.5 m connection |
||||||||
|
Connector terminal block |
cable |
|||||||
|
JUSP-TA50P |
6.8.4 |
|||||||
|
c |
converter unit |
|||||||
|
CN1 |
||||||||
|
I/O Signal |
||||||||
|
Cables |
Cable with |
1 m |
JZSP-CKI01-1 |
Loose wires at host controller end |
||||
|
loose wires at |
2 m |
JZSP-CKI01-2 |
6.7.1 |
|||||
|
one end |
3 m |
JZSP-CKI01-3 |
||||||
|
0.5m |
JZSP–CKI0D–D50 |
Cable |
||||||
|
Cable with Female D-sub Output |
1m |
JZSP–CKI0D–01 |
– |
|||||
|
Connector** |
2m |
JZSP–CKI0D–02 |
||||||
|
3m |
JZSP–CKI0D–03 |
|||||||
|
With connection cable (1 m) |
||||||||
|
dDigital Operator |
JUSP-OP02A-2 |
6.8.2
Only required when using Σ series
e Digital Operator JUSP-OP02A-1.
CN3
|
Connection Cable |
1 m |
JZSP-CMS00-1 |
SERVOPACK |
Operator |
|||
|
for Digital Operator |
end |
end |
|||||
|
f CN3 |
D-Sub 9-pin (For DOS/V) |
||||||
|
2 m |
YS-12 |
SERVOPACK |
Personal |
6.8.1 |
|||
|
Connection Cable for Personal |
end |
computer end |
|||||
|
Computer |
|||||||
|
g CN5 |
1 m |
JZSP-CA01 |
SERVOPACK end |
Monitor end |
6.8.3 |
||
|
Analog Monitor Cable |
(or DE9404559) |
||||||
|
Name |
Type |
Refer- |
|||||
|
ence |
|||||||
|
MECHATROLINK-I Application Module |
JUSP-NS100 |
6.8.10 |
|||||
|
(NS100) |
|||||||
|
MECHATROLINK-II Application Module |
JUSP-NS115 |
6.8.10 |
|||||
|
hApplication Module |
(NS115) |
||||||
|
6.8.11 |
|||||||
|
DeviceNet Application Module (NS300) |
JUSP-NS300 |
||||||
|
PROFIBUS-DP Application Module (NS500) |
JUSP-NS500 |
6.8.12 |
|||||
|
INDEXER Application Module (NS600) |
JUSP-NS600 |
6.8.13 |
* For details, refer to the manuals of each application module.
**The 50-pin female D-sub output connector mates to a customer-supplied 3rd party terminal block. (e.g., Wago #289-449, Weidmuller #919658, Phoenix #2283647, Amphenol/Sine #20-51039, and many others)
2-10

2.6 Selecting Peripheral Devices
|
2.6.2 |
Molded-case Circuit Breaker and Fuse Capacity |
||||||||||
|
Current Capacity of the |
|||||||||||
|
Main |
SERVOPACK |
Power Supply |
Molded-case Circuit Breaker |
Inrush Current |
|||||||
|
Model |
and the Fuse (A |
) 1 2 |
|||||||||
|
Circuit |
Capacity per |
rms |
|||||||||
|
(Refer to 6.8.7) |
|||||||||||
|
Power |
SERVOPACK |
||||||||||
|
Supply |
Capacity |
SGDH— |
(kVA) |
Main Circuit |
Control Cir- |
Main Circuit |
Control Cir- |
||||
|
cuit Power |
cuit Power |
||||||||||
|
(kW) |
Power Supply |
Supply |
Power Supply |
Supply |
|||||||
|
Single- |
0.05 |
A5AE |
0.25 |
||||||||
|
0.10 |
01AE |
0.40 |
4 |
0.13 |
63A |
60A |
|||||
|
phase |
|||||||||||
|
0.20 |
02AE |
0.75 |
|||||||||
|
200 V |
|||||||||||
|
0.40 |
04AE |
1.2 |
8 |
2 |
|||||||
|
0.45 |
05AE |
1.4 |
4 |
||||||||
|
0.75 |
08AE |
1.9 |
7 |
118A |
|||||||
|
Three- |
1.0 |
10AE |
2.3 |
||||||||
|
0.15 4 |
|||||||||||
|
1.5 |
15AE |
3.2 |
10 |
60A |
|||||||
|
phase |
|||||||||||
|
2.0 |
20AE |
4.3 |
13 |
||||||||
|
200 V |
63A |
||||||||||
|
3.0 |
30AE |
5.9 |
17 |
||||||||
|
5.0 |
50AE |
7.5 |
28 |
67A |
|||||||
|
7.5 |
75AE |
15.5 |
41 |
0.27 4 |
40A |
||||||
|
0.45 |
05DE |
1.1 |
1.6 |
||||||||
|
10A |
|||||||||||
|
1.0 |
10DE |
2.3 |
3.4 |
||||||||
|
Three- |
1.5 |
15DE |
3.2 |
4.6 |
0.7 4 |
||||||
|
2.0 |
20DE |
4.9 |
7.1 |
(24 VDC) 3 |
|||||||
|
phase |
20A |
||||||||||
|
400 V |
3.0 |
30DE |
6.7 |
9.7 |
|||||||
|
5.0 |
50DE |
10.3 |
14.9 |
78A |
|||||||
|
7.5 |
75DE |
15.4 |
22.3 |
1.2 4 |
20A |
*1. Nominal value at the rated load. The specified derating is required to select an appropriate fuse capacity.
*2. Cutoff characteristics (25°C): 300% five seconds min. and inrush current of 20ms.
*3. A preventive circuit for inrush current is not built in the 24 VDC control power supply. The protective circuit must be designed by the customer.
*4. Make sure the current capacity is accurate. For the SERVOPACK with the cooling fan builtin, an inrush current flows; 200 % of the current capacity in the table above for two seconds, when turning ON the control circuit power supply to start the fan working.
Note: Do not use a fast-acting fuse. Because the SERVOPACK’s power supply is a capacitor input type, a fast-acting fuse may blow when the power is turned ON.
|
IMPORTANT |
The SGDH SERVOPACK does not include a protective grounding circuit. Install a ground-fault protector |
|
|
to protect the system against overload and short-circuit or protective grounding combined with the molded- |
||
|
case circuit breaker. |
||
2-11

2 Selections
2.6.3Noise Filters and DC Reactors
2.6.3Noise Filters and DC Reactors
|
Main Circuit |
SERVOPACK Model |
Recommended Noise Filter |
DC |
|||
|
(Refer to 6.8.8.) |
Reactor |
|||||
|
Power |
||||||
|
Capacity |
(Refer to |
|||||
|
Supply |
SGDH— |
Type |
Specifications |
|||
|
(kW) |
6.8.9.) |
|||||
|
0.05 |
A5AE |
Single-phase |
− |
|||
|
0.10 |
01AE |
FN2070-6/07 |
X5071 |
|||
|
Single-phase |
250 VAC, 6 A |
|||||
|
0.20 |
02AE |
X5070 |
||||
|
200 V |
||||||
|
0.40 |
04AE |
FN2070-10/07 |
Single-phase |
X5069 |
||
|
250 VAC, 10 A |
||||||
|
0.45 |
05AE |
FN258L-7/07 |
Three-phase |
|||
|
480 VAC, 7 A |
||||||
|
X5061 |
||||||
|
0.75 |
08AE |
|||||
|
1.0 |
10AE |
FN258L-16/07 |
Three-phase |
|||
|
480 VAC, 16 A |
||||||
|
1.5 |
15AE |
X5060 |
||||
|
Three-phase |
2.0 |
20AE |
||||
|
200 V |
||||||
|
3.0 |
30AE |
FN258L-30/07 |
Three-phase |
X5059 |
||
|
480 VAC, 30 A |
||||||
|
5.0 |
50AE |
FMAC-0934-5010 |
Three-phase |
X5068 |
||
|
440 VAC, 50 A |
||||||
|
− |
||||||
|
7.5 |
75AE |
FMAC-0953-6410 |
Three-phase |
|||
|
440 VAC, 64 A |
||||||
|
0.45 |
05DE |
Three-phase |
X5074 |
|||
|
1.0 |
10DE |
FN258L-7/07 |
||||
|
480 VAC, 7 A |
X5075 |
|||||
|
Three-phase |
1.5 |
15DE |
||||
|
2.0 |
20DE |
Three-phase |
||||
|
400 V |
FN258L-16/07 |
X5076 |
||||
|
3.0 |
30DE |
480 VAC, 16 A |
||||
|
5.0 |
50DE |
FS5559-35-33 |
Three-phase |
X5077 |
||
|
7.5 |
75DE |
480 VAC, 35 A |
− |
|||
Note: 1. If some SERVOPACKs are wired at the same time, select the proper magnetic contactors according to the total capacity.
2. The following table shows the manufacturers of each device.
|
Peripheral Device |
Manufacturer |
|
|
Noise Filter |
FN, FS type: Schaffner Electronic |
|
|
FMAC type: SCHURTER (formely TIMONTA) |
||
|
DC Reactor |
Yaskawa Controls Co., Ltd. |
2-12

2.6 Selecting Peripheral Devices
2.6.4 Regenerative Resistors
|
SERVOPACK Model |
Regenerative Resistor |
||||||
|
(Refer to 6.8.5, 6.8.6, and 7.6.) |
|||||||
|
Main Circuit |
|||||||
|
Built-in |
|||||||
|
Power Supply |
Capacity |
Externally |
|||||
|
SGDH- |
Resistance |
Capacity |
|||||
|
(kW) |
connected |
||||||
|
(Ω) |
(W) |
||||||
|
0.05 |
A5AE |
||||||
|
Single-phase |
0.10 |
01AE |
− |
− |
− |
||
|
200 V |
|||||||
|
0.20 |
02AE |
||||||
|
0.40 |
04AE |
||||||
|
0.45 |
05AE |
||||||
|
0.75 |
08AE |
50 |
60 |
2 |
|||
|
1.0 |
10AE |
||||||
|
Three-phase |
1.5 |
15AE |
30 |
70 |
− |
||
|
200 V |
2.0 |
20AE |
25 |
140 |
|||
|
3.0 |
30AE |
12.5 |
140 |
||||
|
5.0 |
50AE |
8 |
280 |
||||
|
7.5 |
75AE |
(3.13) 1 |
(1760) 1 |
JUSP-RA05 |
|||
|
0.45 |
05DE |
||||||
|
108 |
70 |
||||||
|
1.0 |
10DE |
||||||
|
Three-phase |
1.5 |
15DE |
− |
||||
|
2.0 |
20DE |
45 |
140 |
||||
|
400 V |
|||||||
|
3.0 |
30DE |
||||||
|
5.0 |
50DE |
32 |
180 |
||||
|
7.5 |
75DE |
(18) 2 |
(880) 2 |
JUSP-RA18 |
*1. For the optional JUSP-RA05 Regenerative Resistor Unit.
*2. For the optional JUSP-RA18 Regenerative Resistor Unit.
Note: 1. If the SERVOPACK cannot process the regenerative power, an external regenerative resistor is required. Refer to 6.8.5 External Regenerative Resistor, 6.8.6 Regenerative Resistor, and 7.6 Connecting Regenerative Resistors.
2. The following table shows the manufacturers of each device.
|
Peripheral Device |
Manufacturer |
|
External Regenerative Resistor |
Iwaki Wireless Research Institute |
|
External Regenerative Unit |
Yaskawa Electric Corporation |
2-13

2 Selections
2.6.5Linear Scales
2.6.5Linear Scales
|
Max. Value |
Max. Speed of |
||||||
|
of Encoder |
|||||||
|
Resolution |
Scale Pitch |
Applicable Linear |
|||||
|
Manufacturer |
Type |
Output Signal |
Output |
||||
|
(μm/pulse) |
(μm) |
Servomotor |
|||||
|
Resolution |
|||||||
|
(m/s) |
|||||||
|
(Pn281) |
|||||||
|
31 |
5 |
||||||
|
Renishaw Inc. |
RGH22B |
0.078 |
20 |
63 |
4 |
||
|
127 |
2 |
||||||
|
255 |
1 |
||||||
|
63 |
5 |
||||||
|
LIDA187 |
0.156 |
40 |
|||||
|
127 |
4 |
||||||
|
1Vpp |
255 |
2 |
|||||
|
31 |
5 |
||||||
|
Analog voltage |
|||||||
|
Heidenhain |
LIDA487 |
0.078 |
20 |
63 |
4 |
||
|
LIDA489 |
127 |
2 |
|||||
|
Corp. |
|||||||
|
255 |
1 |
||||||
|
31 |
1.0 |
||||||
|
LIF181 |
0.016 |
4 |
63 |
0.8 |
|||
|
127 |
0.4 |
||||||
|
255 |
0.2 |
Note: 1. The linear scale signal is multiplied by eight bits (256 segmentation) inside the serial converter unit.
2.Using the zero-point signal with a linear scale made by Renishaw Inc. may cause a deviation in the home position. If so, adjust the setting so that the zero-point is output only in one direction by using BID/DIR signal.
3.This list does not cover all the applicable types of linear scales. And, the linear scales listed in the table may not be applicable or available if their specifications have been modified or their production has been stopped.
Check the most recent catalog of the linear scale manufacturer to select a linear scale that meets the specifications described in 5.1 Serial Converter Unit Specifications.
4.Select a linear scale so that the current consumption of the linear scale is 190 mA max.
5.At parameter (Pn280), set the scale pitch of the linear scale so that it satisfies the following condition. Otherwise, satisfactory control cannot be obtained.
|
64000 |
must result in an integer number |
|
|
Pn280(Scale pitch (μm)) |
||
Examples
Correct: 1,2,4,8,10,16,20,40
Incorrect: 3,12,18
2-14

3
Specifications and Dimensional Drawings
3
3.1 Ratings and Specifications of SGLGW/SGLGM — — — — — — — — — — — — — — — — — — — -3-2 3.2 Ratings and Specifications of SGLFW/SGLFM — — — — — — — — — — — — — — — — — — — -3-6 3.3 Ratings and Specifications of SGLTW/SGLTM — — — — — — — — — — — — — — — — — — — — -3-9 3.4 Mechanical Specifications of Linear Servomotors — — — — — — — — — — — — — — — — — 3-15 3.5 Quick Guide to Linear Servomotor Dimensional Drawings — — — — — — — — — — — 3-16
3.6 Dimensional Drawings of SGLGW/SGLGM Linear Servomotors — — — — — — — 3-17
3.6.1 SGLG -30 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 3-17 3.6.2 SGLG -40 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 3-19 3.6.3 SGLG -60 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 3-22 3.6.4 SGLG -90 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 3-25
3.7 Dimensional Drawings of SGLFW/SGLFM Linear Servomotors — — — — — — — — 3-27
3.7.1 SGLF -20 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 3-27 3.7.2 SGLF -35 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 3-29 3.7.3 SGLF -50 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 3-31 3.7.4 SGLF -1Z Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — 3-33
3.8 Dimensional Drawings of SGLTW / SGLTM Linear Servomotors — — — — — — — 3-35
|
3.8.1 SGLT -20 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
3-35 |
|
3.8.2 SGLT -35 A Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
3-38 |
|
3.8.3 SGLT -35 H Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
3-41 |
|
3.8.4 SGLT -40 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
3-43 |
|
3.8.5 SGLT -50 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
3-46 |
|
3.8.6 SGLT -80 Linear Servomotors — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — — |
3-48 |
3-1

3 Specifications and Dimensional Drawings
3.1Ratings and Specifications of SGLGW/SGLGM
(1)Ratings and Specifications
•Time Rating: Continuous
•Insulation Resistance: 500 VDC, 10 MΩ min.
•Ambient Temperature: 0 to 40 °C (32 to 104°F)
•Excitation: Permanent magnet
•Dielectric Strength: 1500 VAC for 1 minute
•Protection Methods: Self-cooled, air-cooling
•Ambient Humidity: 20 to 80 % (no condensation)
•Allowable Winding Temperature: 130 °C (266°F) (Insulation class B)
(a)With Standard-force Magnetic Ways
The following table shows the ratings and specifications when the standard-force magnetic ways are used.
|
Linear Servomotor |
30A |
40A |
60A |
90A |
|||||||||
|
Model SGLGW- |
050C |
080C |
140C |
253C |
365C |
140C |
253C |
365C |
200C |
370C |
535C |
||
|
Rated Speed |
m / s |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
1.5 |
|
|
Peak Speed |
m / s |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
5 |
|
|
Rated Force |
N |
12.5 |
25 |
47 |
93 |
140 |
70 |
140 |
210 |
325 |
550 |
750 |
|
|
Rated Current |
Arms |
0.51 |
0.79 |
0.8 |
1.6 |
2.4 |
1.2 |
2.2 |
3.3 |
4.4 |
7.5 |
10.2 |
|
|
Instantaneous Peak |
N |
40 |
80 |
140 |
280 |
420 |
220 |
440 |
660 |
1300 |
2200 |
3000 |
|
|
Force |
|||||||||||||
|
Instantaneous Peak |
Arms |
1.62 |
2.53 |
2.4 |
4.9 |
7.3 |
3.5 |
7.0 |
10.5 |
17.6 |
30.0 |
40.8 |
|
|
Current |
|||||||||||||
|
Coil Assembly Mass |
kg |
0.10 |
0.15 |
0.34 |
0.60 |
0.87 |
0.42 |
0.76 |
1.10 |
2.15 |
3.6 |
4.9 |
|
|
Force Constant |
N / Arms |
26.4 |
33.9 |
61.5 |
61.5 |
61.5 |
66.6 |
66.6 |
66.6 |
78 |
78 |
78 |
|
|
BEMF Constant |
V /(m / s) |
8.8 |
11.3 |
20.5 |
20.5 |
20.5 |
22.2 |
22.2 |
22.2 |
26.0 |
26.0 |
26.0 |
|
|
Motor Constant |
N / w |
3.7 |
5.6 |
7.8 |
11.0 |
13.5 |
11.1 |
15.7 |
19.2 |
26.0 |
36.8 |
45.0 |
|
|
Electrical Time |
ms |
0.2 |
0.4 |
0.4 |
0.4 |
0.4 |
0.5 |
0.5 |
0.5 |
1.4 |
1.4 |
1.4 |
|
|
Constant |
|||||||||||||
|
Mechanical Time |
ms |
7.30 |
4.78 |
5.59 |
4.96 |
4.77 |
3.41 |
3.08 |
2.98 |
3.18 |
2.66 |
2.42 |
|
|
Constant |
|||||||||||||
|
Thermal Resistance |
K / W |
5.19 |
3.11 |
1.67 |
0.87 |
0.58 |
1.56 |
0.77 |
0.51 |
0.39 |
0.26 |
0.22 |
|
|
With Heat Sink |
|||||||||||||
|
Thermal Resistance |
K / W |
− |
− |
3.02 |
1.80 |
1.23 |
2.59 |
1.48 |
1.15 |
− |
− |
− |
|
|
Without Heat Sink |
|||||||||||||
|
Magnetic Attraction |
N |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Note: 1. The items marked with an * and “Force and Speed Characteristics” are the values at a motor winding temperature of 100 °C (212°F) during operation in combination with a SERVOPACK. The others are at 20 °C (68°F).
3-2
 Loading…
Loading…
Подключение к сервоприводу серии SIGMA (SGDB)
Кабель для подключения — COM/RS-232 D-Sub 9-pin (Male) (в инструкции к сервоприводу присутствует распиновка)
Программа: SigmaWin+ 5.75
Подключение к сервоприводу серии SIGMA-2 (SGDH)
Кабель для подключения — JZSP-CMS02 (потребуется переходник USB/RS232 или можно купить готовый китайский кабель USB-JZSP-CMS02)
Программа: SigmaWin+ 5.75
Подключение к сервоприводу серии SIGMA-5 (SGDV)
Кабель для подключения — MiniUSB
Программа: SigmaWin+ 5.75
Мне пригодились следующие функции:
1. Создание резервной копии параметров сервопривода
Parameters -> Edit Parameters -> Saves parameter data to a file
2. Отображение текущей ошибки и истории ошибок. Сброс после аварийной остановки, чтобы полностью не выключать станок после аварии.
Alarm -> Display Alarm
3. Наблюдением за состоянием привода в реальном времени
Trace -> Real Time Trace -> Setup -> Выбираем значения за которыми будем следить -> OK -> START -> задаем масштаб и периодичность обновления
4. Наблюдением за состоянием входов и выходов в реальном времени
Monitor -> Wiring Check
Подробности можно узнать в инструкции к программе SigmaWin+
Не бойся поломать. Бойся не починить ))


1. Сервопривод Sigma-II. SGDH -@. Сервопривод Sigma-II. Серия идеальных сервоприводов для управления перемещениями. Высокое быстродействие.
SGDH-@ Сервопривод Sigma-II Серия идеальных сервоприводов для управления перемещениями. Высокое быстродействие, высокая скорость, высокая точность. • Автоматическая настройка в режиме работы, 10 уровней точности • Пиковый крутящий момент до 300 % от номинального • Автоматическое распознавание двигателей • Аналоговое регулирование скорости и крутящего момента • Управление позиционированием с помощью последовательности импульсов • Дополнительные модули для подключения к сети и гибкого проектирования • Плавная работа • Построение осциллограмм с помощью специального ПО • Программное обеспечение под Windows для конфигурирования и отладки Номинальные параметры • 230 В~, 1-фазный, от 30 Вт до 1,5 кВт (4,77 НЇм) • 400 В~, 3-фазный, от 450 Вт до 55 кВт (350 НЇм) Состав сервосистемы Сервопривод серии Sigma-II SERVOPACK Батарея для абсолютного энкодера Кабель для аналоговых сигналов контроля Дополнительный блок NS115 S W 1 A R S W 2 SGDHVer. 08AE-S-OY 400V Цифровая панель управления MODE/SET CHARGE C N 6 A 1- Mechatrolink-I/II 2- DeviceNet 3- Profibus 4- Контроллер управления перемещениями 5- Модуль шагового перемещения DATA/ POWER Персональный компьютер L1 L2 +1 +2 L1C L2C B1 B2 U В W CN3 C N 6 B CN1 Входные/выходные сигналы Модуль многоосного управления перемещениями Модуль управления позиционированием Промежуточный блок C N 4 CN2 Кабель общего назначения Клеммный блок Серводвигатель SGMAH/SGMPH Серводвигатель SGMGH/SGMSH/SGMUH/SGMBH Подробную информацию смотрите в техническом описании поворотных двигателей Sigma-II Линейные серводвигатели SGLG Подробную информацию смотрите в техническом описании линейных двигателей Sigma Линейные серводвигатели SGLF Линейные серводвигатели SGLT Сервопривод Sigma-II 1 Поддерживаемые серводвигатели Серия Напряжение Серводвигатель Номинальный вращающий момент Примечания SGMAH (3000 мин-1) 230 В 400 В от 0,0955 НЇм до 2,39 НЇм Подробную информацию смотрите в техническом описании поворотных от 0,955 НЇм до 2,07 НЇм двигателей Sigma-II SGMPH (3000 мин-1) 230 В 400 В от 0,318 НЇм до 4,77 НЇм от 0,637 НЇм до 4,77 НЇм Подробную информацию смотрите в техническом описании поворотных двигателей Sigma-II SGMGH (1500 мин-1) 400 В от 2,84 НЇм до 95,4 НЇм Подробную информацию смотрите в техническом описании поворотных двигателей Sigma-II SGMSH (3000 мин-1) 400 В от 3,18 НЇм до 15,8 НЇм Подробную информацию смотрите в техническом описании поворотных двигателей Sigma-II SGMUH (6000 мин-1) 400 В от 1,59 НЇм до 6,3 НЇм Подробную информацию смотрите в техническом описании поворотных двигателей Sigma-II SGMBH (1500 мин-1) 400 В от 140 НЇм до 350 НЇм Подробную информацию смотрите в техническом описании поворотных двигателей Sigma-II SGLGW Линейные двигатели 230 В от 13,5 Н до 325 Н Подробную информацию смотрите в техническом описании линейных двигателей Sigma SGLFW Линейные двигатели 230 В 400 В от 25 Н до 560 Н от 80 Н до 1120 Н Подробную информацию смотрите в техническом описании линейных двигателей Sigma SGLTW Линейные двигатели 400 В от 300 Н до 2000 Н Подробную информацию смотрите в техническом описании линейных двигателей Sigma Расшифровка номера модели Сервопривод SGDH — 04 A E — S — OY Сервопривод Sigma-II Мощность A3 A5 01 02 04 05 08 10 30 Вт 50 Вт 100 Вт 200 Вт 400 Вт 500 Вт 750 Вт 1,0 кВт 15 20 30 50 60 75 1A 1E 1,5 кВт 2,0 кВт 3,0 кВт 5,0 кВт 6,0 кВт 7,5 кВт 11 кВт 15 кВт 2B 3Z 3G 4E 5E 22 кВт 30 кВт 37 кВт 45 кВт 55 кВт Кол-во фаз Трехфазный (0,5 … 55 кВт) Пропуск Однофазный (30 … 400 Вт) S Однофазный (750 Вт/1,5 кВт) Модель E: Скорость, момент, положение Напряжение питания A: 230 В D: 400 В 2 Сервосистемы переменного тока Технические характеристики сервоприводов Однофазные приводы на напряжение 230 В Тип сервопривода Применимый серводвигатель SGDH- @ SGMAH-@ SGMPH-@ Макс. допустимая мощность двигателя Вт Продолжительный выходной ток A (ср.кв.зн.) Макс. выходной ток A (ср.кв.зн.) Входное напряжение Силовые цепи питания Цепи управления Метод регулирования Обратная связь Температура эксплуатации/хранения Влажность эксплуатации/хранения Высота над уровнем моря Вибро-/Ударопрочность Конфигурация Приблиз. масса кг A3AE-OY A5AE-OY 01AE-OY A3A@ A5A@ 01A@ 01A@ 30 50 100 0,44 0,64 0,91 1,3 2,0 2,8 Однофазное напряжение 200…230 В~ +10…–15 % Однофазное напряжение 200…230 В~ +10…–15 % 02AE-OY 02A@ 02A@ 200 2,1 6,5 04AE-OY 04A@ 04A@ 400 2,8 8,5 08AE-S-OY 15AE-S-OY 08A@ 08A@ 15A@ 750 1500 5,7 11,6 13,9 28 220 … 230 В~ +10 … –15 % (50/60 Гц) Основные характеристики Однофазный двухполупериодный выпрямитель – IGBT(БТИЗ) – PWM (ШИМ) – синусоидальный ток Энкодер с последовательным интерфейсом (инкрементное/абсолютное значение) От 0 до +55╟C/от –20 до 85╟C Отн. влажность не более 90 % (без конденсации) Не более 1000 м над уровнем моря 4,9 м/с2/19,6 м/с2 Для монтажа на основание 0,8 1,1 1,7 Условия 3,8 Трехфазные приводы на напряжение 400 В (до 15 кВт) Тип сервопривода Применимый серводвигатель SGDH- @ SGMGH-@ SGMSH-@ SGMUH-@ Макс. допустимая мощность двигателя кВт Продолжительный выходной ток A (ср.кв.зн.) Макс. выходной ток A (ср.кв.зн.) Входное напряжение Силовые цепи питания Цепи управления Метод регулирования Обратная связь Температура эксплуатации/хранения Влажность эксплуатации/хранения Высота над уровнем моря Вибро-/Ударопрочность Конфигурация Приблиз. масса кг 05DE-OY 10DE-OY 15DE-OY 20DE-OY 30DE-OY 50DE-OY 60DE-OY 75DE-OY 05D@ 09D@ 13D@ 20D@ 30D@ 44D@ 55D@ 75D@ 10D@ 15D@ 20D@ 30D@ 40D@/50D@ 10D@ 15D@ 30D@ 40D@ 0,45 1,0 1,5 2,0 3,0 5,0 6,0 7,5 1,9 3,5 5,4 8,4 11,9 16,5 20,8 25,4 5,5 8,5 14 20 28 40,5 55 65 Трехфазное напряжение 380…480 В~ +10…–15 % (50/60 Гц) 24 В= +15 % Трехфазный двухполупериодный выпрямитель – IGBT(БТИЗ) – PWM (ШИМ) – синусоидальный ток Энкодер с послед. интерф. (инкрементный/абсолютный) От 0 до +55╟C/от –20 до +85╟C Отн. влажность не более 90 % (без конденсации) Не более 1000 м 4,9 м/с2/19,6 м/с2 Для монтажа на основание 2,8 3,8 5,5 15 1ADE-OY 1AD@ 11 28,1 70 1EDE-OY 1ED@ 15 37,2 85 Основные характеристики Условия 22 Трехфазные приводы на напряжение 400 В (от 22 кВт до 55 кВт) Тип сервопривода SGDH- @ Применимый серводвигатель SGMBH-# Макс. допустимая мощность двигателя кВт Продолжительный выходной ток A (ср.кв.зн.) Макс. выходной ток A (ср.кв.зн.) Входное напряжение Силовые цепи питания Цепи управления Метод регулирования Обратная связь Температура эксплуатации/хранения Влажность эксплуатации/хранения Высота над уровнем моря Вибро-/Ударопрочность Конфигурация Приблиз. масса кг Основные характеристики 2BDE 2BD#A 3ZDE 3ZD#A 3GDE 3GD#A 4EDE 4ED#A 5EDE 5ED#A 55 150 310 22 30 37 45 58 80 100 127 120 170 210 260 Трехфазное напряжение 380…480 В~ +10…–15 % (50/60 Гц) 24 В= +15 % Трехфазный двухполупериодный выпрямитель – IGBT(БТИЗ) – PWM (ШИМ) – синусоидальный ток Энкодер с послед. интерф. (инкрементный/абсолютный) От 0 до +55╟C/от –20 до +85╟C Отн. влажность 90 % или меньше (без конденсации) Не более 1000 м 4,9 м/с2/19,6 м/с2 Для монтажа на основание 40 60 65 Общие характеристики Диапазон регулирования скорости Отклонение Влияние нагрузки скорости Влияние напряжения Влияние температуры Частотная характеристика Погрешность регулирования вращающего момента (повторяемость) Настройка времени для плавного пуска Опорное напряжение Вход задания скорости Входное сопротивление Постоянная времени входной цепи Вход Опорное напряжение задания момента Входное сопротивление Постоянная времени входной цепи Управление скоростью/вращающим моментом Характеристики 1:5000 При нагрузке от 0 до 100 %: макс. ╠0,01 % (при номинальной скорости) При номинальном напряжении ╠10 %: 0 % (при номинальной скорости) При температуре 25 ╠25╟C: макс. ╠0,1 % (при номинальной скорости) 400 Гц (при JL= JM для приводов до 15 Вт), 100 Гц (при JL= JM для приводов от 22 кВт до 55 кВт) ╠2 % от 0 до 10 с (может быть задано отдельно для разгона и торможения). ╠6 В= (при положительном напряжении двигатель вращается в прямом направлении) при номинальной скорости: установлено при поставке с завода Диапазон настройки: от ╠2 до ╠10 В= при номинальной скорости/макс. входное напряжение: ╠12 В Приблиз. 14 кОм Приблиз. 47 мкс ╠3 В= (при положительном напряжении двигатель вращается в прямом направлении) при номинальной скорости: установлено при поставке с завода Диапазон настройки: от ╠1 до ╠10 В= при номинальном заданном моменте Приблиз. 14 кОм Приблиз. 47 мкс Сервопривод Sigma-II Входные сигналы Условия 3 Входные/выходные сигналы Настройка смещения Коэффициент компенсации для регулирования с прямой связью Настройка ширины сигнала завершения позиционирования Тип входных импульсов Командные импульсы Уровень входных импульсов Частота входных импульсов Сигнал управления Выходной сигнал позиционирования Входные дискретные сигналы Позиционирование Характеристики От 0 до 450 мин-1 (шаг настройки: 1 мин-1) От 0 до 100 % (шаг настройки: 1 %) От 0 до 250 командных единиц (шаг настройки: 1 командная единица) Знак + последовательность импульсов, две импульсные последовательности (канал А + канал В) со сдвигом на 90╟ или импульсные последовательности CCW/CW (CCW= против часовой стрелки; CW = по часовой стрелке) Выход линейного усилителя (уровень +5 В), выход с открытым коллектором (уровень +5 В или +12 В) От 0 до 500 000 имп/сек (максимум 200 000 имп/сек с выхода с открытым коллектором) Сигнал сброса (входной импульс такой же формы, что и импульс задания) Канал А, канал В, канал С, (канал S): сигнал канала S на выходе линейного усилителя предназначен только для абсолютного энкодера. Включение сервопривода, П-регулирование (или переключение режима управления (регулирования), принудительное обнуление задания, блокировка командных импульсов), запрет прямого/обратного хода, сброс аварии, ограничение тока в прямом/обратном направлении (или переключение фиксированных (внутренних) скоростей) Авария сервопривода, коды аварий (3-битовый выход): фиксированная выходная клемма разъема CN1 Предусмотрена возможность вывода одного из следующих сигналов: ╚позиционирование завершено╩ ( ╚согласование скорости╩), ╚вращение двигателя╩, ╚готовность сервопривода╩, ╚предельный ток╩, ╚предельная скорость╩, ╚отпуск тормоза╩, ╚внимание╩, ╚близкo╩ (NEAR) и импульсный сигнал нулевой точки Цифровая панель оператора (переносная), порт RS-422 для подключения к ПК и т.п. (в некоторых случаях порты RS-232C) N может достигать значения 14 в случае использования порта RS-422A Задается путем настройки параметров пользователя Отображение состояния, отображение настраиваемых и контролируемых констант пользователя, отображение протокола ошибок (аварий), режимы толчкового хода/автонастройки, функции построения графиков сигналов задания скорости/момента и т.п. Возможность автоматической установки коэффициента передачи и постоянной времени интегрирования контура регулирования скорости. Действует при выключенном электропитании, при аварии (ошибке) сервопривода, при отключенном сервоприводе или перебеге. Внешний тормозной резистор (опция) Остановка с динамическим торможением, торможение до полной остановки или вращение по инерции до остановки в режиме предотвращения перебега в прямом (P-OT) или обратном (N-OT) направлении Возможно дополнительное деление сигнала энкодера. 0,01 < A/B < 100 Может быть задано 3 фиксированных (внутренних) значения скорости Защита от превышения тока, превышения напряжения, пониженного напряжения, перегрузки, ошибки датчика цепи электропитания, перегрева радиатора, потери (обрыва) фазы, переизбытка импульсов, превышения скорости, ошибки энкодера, перебега, ошибки ЦПУ, ошибки параметра и т.п. Встроенные разъемы для вывода аналоговых сигналов контроля для слежения за сигналами задания скорости и момента и т.п. Индикаторы CHARGE ( ╚Заряд╩), POWER ( ╚Сеть╩), 7-сегментный 5-разрядный светодиодный индикатор (функции цифровой панели управления) Подключение для вращения в обратном направлении, поиск нуля (начального положения), функция автоматического распознавания двигателя, а также клемма для подключения дросселя постоянного тока для подавления высокочастотных гармоник в сети электропитания (исключение: 6…15 кВт) Входные сигналы Выходные дискретные сигналы Сетевые протоколы Интерфейс Связь по схеме 1:N Настройка адреса оси Функции Встроенные функции Функция автонастройки Динамическое торможение (DB) Рекуперация Функция предотвращения перебега (OT) Функция деления сигнала энкодера Электронный ╚редуктор╩ Задание фиксированных значений скорости Функции защиты Аналоговые сигналы контроля для функций слежения Функции отображения Прочие функции Описание входных/выходных цепей Входные/выходные сигналы (CN1) – Входные сигналы Номер Наименование вывода сигнала 40 Общие /S-ON сигналы 41 /P-CON Функция Включение сервопривода: данный сигнал включает серводвигатель, если преобразовательная плата инвертора разблокирована. Функция данного сигнала выбирается путем настройки параметра. Выбор пропорционального Данный сигнал переключает тип контура регулирования скорости: PI (пропорционально/интегральный) регулирования (ВЫКЛ) или P (пропорциональный) (ВКЛ). Выбор направления Когда выбрана внутренняя фиксированная скорость: переключает направление вращения. Переключение режима управления Положение ↔ скорость Положение ↔ момент Момент ↔ скорость Переключение режима управления 42 43 45 46 P-OT N-OT /P-CL /N-CL 44 47 4 (2) 21 22 5 (6) 9 (10) 7 8 11 12 15 14 3 13 18 /ALM-RST +24VIN SEN BAT (+) BAT (-) Скорость V-REF Вращающ- T-REF ий момент ПоложеPULS ние /PULS SIGN /SIGN CLR /CLR PL1 PL2 PL3 Выбор принудительного обнуления Функция принудительного обнуления задания при регулировании скорости: когда сигнал подан (ВКЛ), задания задание скорости равно нулю. Блокировка импульсного сигнала Позиционирование с блокировкой импульсного сигнала задания: состояние ВКЛ данного сигнала задания блокирует вход импульсного сигнала задания. Запрет прямого хода Предотвращение перебега: данный сигнал останавливает серводвигатель, когда перемещаемый орган Запрет обратного хода выходит за установленную границу перемещения. Функция данного сигнала выбирается путем настройки параметра. Выбор внешнего значения граничного Когда данный сигнал подан (ВКЛ), действует функция ограничения тока. момента в прямом направлении Выбор внешнего значения граничного момента в обратном направлении Переключение фиксированных скоростей Когда выбрана внутренняя фиксированная скорость: переключение фиксированных (внутренних) значений скорости. Сброс аварии (ошибки): отмена состояния аварии (ошибки) сервопривода. Вход напряжения питания схемы управления для дискретных сигналов: должен быть предусмотрен внешний источник питания +24 В. Допустимый диапазон отклонения напряжения: 11 … 25 В Сигнал запроса начального значения в случае использования абсолютного энкодера. Выводы для подключения батареи резервного питания абсолютного энкодера. Не используйте данные выводы, если батарея подключена к центральному контролеру. Вход сигнала задания скорости: ╠2 … ╠10 В/номинальная скорость двигателя (коэффициент масштабирования входа можно изменять с помощью параметра). Вход сигнала задания вращающего момента: ╠1 … ╠10 В/номинальный вращающий момент двигателя (коэффициент масштабирования входа можно изменять с помощью параметра). Вход импульсного сигнала задания Можно выбрать один из следующих типов импульсного сигнала: (только для сигнала с выхода линейного Знак + импульсная последовательность усилителя) Каналы CCW/CW (CCW = против часовой стрелки; CW = по часовой стрелке) Каналы А и В (со сдвигом на 90╟) Вход обнуления импульсов ошибки позиционирования: обнуление количества импульсов ошибки позиционирования при позиционировании. Подтягивающее напряжение +12 В — подается, когда сигналы задания PULS, SIGN и CLR поступают с выходов с открытым коллектором в сервоприводе SERVOPACK предусмотрен встроенный источник питания +12 В). Примечание: 1. В скобках приведены номера выводов для цепей заземления сигналов. 2. Функции входов /S-ON, /P-CON, P-OT, N-OT, /ALM-RST, /P-CL и /N-CL можно изменять с помощью параметров. 3. Максимальное напряжение аналоговых входов задания скорости и момента составляет ╠12 В. 4 Сервосистемы переменного тока Входные/выходные сигналы (CN1) – Выходные сигналы Номер вывода 31 32 27 28 29 30 33 (1) 34 35 36 19 20 48 49 37 38 39 (1) Корпус 25 26 25 26 Наименование сигнала Общие сигналы ALM+ ALM/TGON+ /TGON/S-RDY+ /S-RDYPAO /PAO PBO /PBO PCO /PCO PSO /PSO ALO1 ALO2 ALO3 FG Скорость /V-CMP+ /V-CMPПоложение /COIN+ /COINЗарезервирован /CLT /VLT /BK /WARN /NEAR Функция Авария (ошибка) сервопривода: данный сигнал выключается в случае обнаружения ошибки. Сигнализация вращения серводвигателя с определенной скоростью: сигнализирует о вращении серводвигателя со скоростью, превышающей заданную. Значение пороговой скорости можно выбрать путем настройки параметров. Готовность сервопривода: данный сигнал включен, если при поданном напряжении в силовую цепь/цепь управления отсутствуют аварии (ошибки) сервопривода. Сигнал канала A Преобразованный двухканальный выходной импульсный сигнал энкодера (каналы A и B) и импульсный сигнал нулевой точки (канал C): RS-422 или эквивалентный (В качестве приемного усилителя может быть использован SN75175 производства Texas Сигнал канала B Instruments или эквивалентный, совместимый с MC3486). Сигнал канала C В случае абсолютного энкодера: передача количества оборотов по последовательному интерфейсу (RS-422 или эквивалентный) Выход кода аварии: служит для вывода 3-битовых кодов аварий (ошибок). Параметры выхода с открытым коллектором: 30 В, макс. 20 мА Заземляется на корпус, если проводник экрана кабеля входных/выходных сигналов подсоединяется к корпусу разъема. Согласование скорости (используется в режиме регулирования скорости): сигнализирует нахождение скорости двигателя в заданном диапазоне, а также ее совпадение с заданием. Завершение позиционирования (используется в режиме позиционирования): переходит в состояние ВКЛ, когда количество импульсов ошибки позиционирования достигает установленного значения. Количество импульсов ошибки позиционирования задается в условных единицах (в пачках входных импульсов, вес которых определяется электронным ╚передаточным числом╩). Резервные клеммы Функции выходов /TGON, /S-RDY и /V-CMP (/COIN) можно изменять с помощью параметров. Функции сигналов /CLT, /VLT, /BK, /WARN и /NEAR также можно изменять. Сигнал канала S 16 17 23 24 50 Данные выводы не используются. Не подключайте реле к данным выводам. Примечание: 1. В скобках приведены номера выводов для цепей заземления сигналов. 2. Функции выводов /TGON, /S-RDY и /V-CMP (/COIN) можно изменять с помощью параметров. Функции сигналов /CLT, /VLT, /BK, /WARN и /NEAR также можно изменять. Описание клемм (все приводы) Обознач. L1, L2 или L1, L2, L3 или L1/R, L2/S, L3/T U V W L1C, L2C Название Клеммы ввода сетевого напряжения переменного тока Клеммы для подключения серводвигателя Клеммы подачи питания в цепи управления Заземление корпуса Функция Клеммы силовой цепи, предназначенные для подачи сетевого напряжения переменного тока Красный Клеммы для подачи питания на серводвигатель. Белый Синий Клеммы для подачи напряжения питания переменного тока в схему управления. Клемма заземления. Сопротивление цепи заземления не должно превышать 100 Ом (класс 3) B1, B2 или B1, B2, B3 ⊕1, ⊕2 ⊕ Клеммы выхода напряжения постоянного до 5 кВт: если энергия рекуперации слишком велика, подключите к данным клеммам внешний тормозной резистор. тока силовой цепи от 5,5 кВт до 55 кВт: внутренний тормозной резистор не предусмотрен. Обязательно подключите внешний блок тормозного резистора. Клеммы для подключения дросселя Обычно клеммы ⊕1 и ⊕2 замкнуты накоротко. постоянного тока для подавления Если необходимо предусмотреть подавление гармоник в цепи электропитания, подсоедините к клеммам ⊕1 и ⊕2 дроссель постоянного тока. гармоник в цепи электропитания Клемма выхода напряжения постоянного Как правило, не используется. тока силовой цепи (+) Данная клемма имеется только у сервоприводов на мощность 6,0 кВт или выше. Клемма выхода напряжения постоянного Как правило, не используется. тока силовой цепи (-) Описание клемм (от 15 кВт до 55 кВт) Обознач. DC24P,DC24N DU, DV, DW DBON, DB24 480 В, 460 В, 440 В, 400 В, 380 В, 0 В Название Клеммы подачи напряжения питания в схему управления Клеммы подключения модуля или, контактора динамического торможения Клеммы подключения модуля динамического торможения Клеммы электропитания схемы управления Функция 24 В= Служат для подключения модуля или контактора динамического торможения. Для двигателей мощностью от 37 до 55 кВт: служат для подключения модуля динамического торможения. Подайте напряжение питания на клеммы, наиболее подходящие по номиналу. Разъем для подключения энкодера(CN2) Вывод 1 2 3 4 5 6 E5V E0V BAT+ BAT– S+ S– Наименование сигнала Функция Напряжение питания энкодера (+5 В) Напряжение питания энкодера ( ╚земля╩) Батарея (+) (используется только для абсолютного энкодера) Батарея (-) (используется только для абсолютного энкодера) Вход для сигнала энкодера с последовательным интерфейсом. Вход для сигнала энкодера с последовательным интерфейсом. Сервопривод Sigma-II 5 Описание работы Интерфейс управления Пульт настройки параметров R88A-PR02W Сервопривод SGDH-@ Назначение клавиш R88A-PR02W SGDH-@ Функция Сброс аварии (ошибки) Переключение между режимами: отображение состояния проверка системы – настройка – контроль (наблюдение). Используется для ввода значений в режиме настройки. Включение и выключение сервопривода во время толчкового хода. Переключение между отображением параметров и значений, а также запись значений. Увеличение значения параметра. Во время толчкового хода используется как кнопка запуска вращения в прямом направлении. Уменьшение значения параметра. Во время толчкового хода используется как кнопка запуска вращения в обратном направлении. Выбор разряда, значение которого требуется изменить. Цифра выбранного разряда мигает. Дисплей Отображает скорость двигателя, значения заданий скорости и вращательного момента двигателя, значения пользовательских параметров и состояние сервопривода. Изменение режимов Чтобы изменить режим, нажмите клавишу MODE/SET. Включение питания (Пример отображения) Режим отображения состояния Блокировка выхода Режим проверки системы Режим отображения журнала ошибок Режим настройки Переключатель выбора функции Включение питания Режимы (подробно) Режим контроля Обратная связь по скорости Режим отображения состояния Отображение битов Режим отображения состояния Электропитание цепей управления включено Блокировка выхода Согласование скорости (в режиме регулирования скорости) Позиционирование завершено (1) (в режиме позиционирования) Обнаружение вращения двигателя Подается команда задания скорости (в режиме регулирования скорости) Подаются управляющие импульсы (в режиме позиционирования) Подается команда задания момента (в режиме регулирования момента) Подается сигнал сброса счетчика ошибок (в режиме позиционирования) Электропитание силовых цепей включено Электропитание силовых цепей включено, электропитание цепей управления включено, блокировка выхода (двигатель отключен), согласование скорости, позиционирование завершено (1), команда задания момента введена, сигнал сброса счетчика ошибок подан, команда задания скорости введена, управляющие импульсы поданы, обнаружено вращение двигателя Отображение символов Блокировка выхода, работа (вращение), запрет вращения в прямом направлении, запрет вращения в обратном направлении, отображение ошибок Режим проверки системы Отображение битов Отображение символов Просмотр журнала произошедших ошибок, задание параметров устойчивости при оперативной автоподстройке, операции толчкового хода, поиск исходного положения двигателя, инициализация параметров пользователя, очистка журнала произошедших ошибок, сохранение (запись) результатов оперативной автоподстройки, автоматическая регулировка смещения задания, ручная регулировки смещения задания, установка пароля Символ Состояние bb rUn p%t n%t a.02 Блокировка выхода (двигатель отключен) Работа (вращение) Запрет прямого вращения (перебега в прямом направлении) Запрет обратного вращения (перебега в обратном направлении) Отображение ошибки Режим настройки Параметры пользователя Pn000 … Pn600 Режим контроля ОС по скорости, задания скорости и момента, количество импульсов относительно начального положения (начала отсчета), фаза, контроль входного сигнала, контроль выходного сигнала, отображение частоты управляющих импульсов, ошибка позиционирования, счетчик входных импульсов/импульсов сигнала ОС 6 Сервосистемы переменного тока Размеры (мм) Сервоприводы SGDH-A3AE-OY … -02AE-OY (230 В, от 30 до 200 Вт) Монтажные отверстия SERVOPACK SGDH- CN3 CN1 106 CN1 CN2 CN2 Клемма заземления 6 2 винта x M4 6 5 149,5╠0,5 Клеммный блок CHARGE POWER CN3 (Расстояние между отверстиями) Ver. CN10 200V 160 39 160 5,5 2 отв. x M4 10 55 8 75 130 5 55 SGDH-04AE-OY (230 В, 400 Вт) Монтажные отверстия 5,5 5,5 200V 2 отв.φ5 SERVOPACK 2 отв. x M4 (Расстояние между отверстиями) SGDHVer. CN10 39 CN3 160 149,5 CN1 CN1 106 CN2 CN2 (5) Клемма заземления 2 винта x M4 5 63 75 8 6 5 6 10 160 149,5╠0,5 Клеммный блок CHARGE POWER CN3 12 75 12 75 130 SGDH-08AE-S-OY (230 В, 750 Вт) 96,2 φ5 SERVOPACK Монтажные отверстия CN10 (Расстояние между отверстиями) SGDH- 94,4 39 Клеммный блок Ver. 220V 5,5 2 отв. x M4 CHARGE POWER CN3 CN1 CN1 CN2 5 CN2 160 149,5╠0,5 5 CN3 160 106 Охлаждающий вентилятор 27 90 15 35 10 90 Клемма заземления 2 винта x M4 55 8 75 180 Сервопривод Sigma-II 7 SGDH-05DE-OY … -15DE-OY (400 В, от 0,5 до 1,5 кВт) 2 отв. x φ5 Радиатор SERVOPACK Монтажные отверстия 5,5 4 отв. x M4 (Расстояние между отверстиями) SGDHVer. 400V CN10 39 CHARGE POWER CN1 — CN1 CN2 CN2 5 5 Клемма заземления 2 винта x M4 Клеммный блок 160 149,5╠0,5 CN3 160 CN3 106 5 110 8 75 180 4 (Расстояние между отверстиями) 100╠0,5 5 110 SGDH-15AE-S (230 В, 1,5 кВт) SGDH-20/30DE-OY (400 В, 2/3 кВт) 2 отв. x φ6 Радиатор SERVOPACK Монтажные отверстия 4 отв. x M5 (Расстояние между отверстиями) 6 6 SGDHVer. CN10 39 CHARGE POWER CN3 CN3 238,5╠0,5 5,5 CN1 CN1 250 250 238,5 CN2 CN2 Клеммная колодка на 14 клемм Зажимной винт М4 5,5 196 6 100 5 8 75 5 100╠0,5 (Расстояние между отверстиями) 5 Клемма заземления 5 2 винта x M4 110 180 4 110 Паспортная табличка 8 Сервосистемы переменного тока SGDH-50DE-OY (400 В, 5 кВт) Радиатор 6 SERVOPACK SGDHVer. 400V Клеммная колодка на 4 клеммы Винт М4 L2 CHARGE POWER CN3 CN1 CN2 L1C L2C B1 B2 B3 U V W L3 +1 +2 5,5 5,7 5 5,5 125 135 5 75 Клеммная колодка на 3 клеммы Винт М5 230 1,6 238,5╠0,5 250 238,5 — (Расстояние между отверстиями) L1 CN10 250 6 Клеммная колодка на 6 клемм Винт М5 Монтажные отверстия 8 4 отв. x M5 5 125╠0,5 (Расстояние между отверстиями) 5 Клемма заземления Винт М5 SGDH-60/75DE-OY (400 В, 6/7,5 кВт) Монтажные отверстия Охлаждающий вентилятор 7,5 10 SGDHVer. CHARGE CN3 POWER CN8 SERVOPACK BATTERY 400V CN5 8 CN10 39 110 283 Клемма силовой цепи/ цепи управления 335 350 130 32 46 +1 +2 24V 0V B1 B2 U V W Клемма M5 силовой цепи L1 L2 L3 7 158 180 230 20 7,5 24 211 CN1 CN2 7 121 235 90 25 25 335 7,5 4 отв. x M6 Клемма Клемма M5 Клемма M4 силовой цепи цепи управления заземления M5 SGDH-1A/1EDE-OY (400 В, 11/15 кВт) Монтажные отверстия Охлаждающий вентилятор 7,5 Клемма заземления 25 180 25 4 отв. x M6 7,5 7,5 435 7,5 10 SERVOPACK SGDHVer. 400V 8 CN3 CHARGE POWER CN8 BATTER CN5 CN10 39 140 435 450 Клемма силовой цепи/ цепи управления CN1 CN2 320 L1 L2 L3 +1 +2 — 7,5 B1 B2 U V W 36 9 123,5 30 7 7 24 Клемма M5 силовой цепи 248 19 117 285 52 84,5 30 200 260 Клемма M4 цепи управления 17 125 30 200 30 Клемма M5 силовой цепи Клемма заземления M8 Клемма заземления M8 Сервопривод Sigma-II 9 SGDH-2BDE (400 В, 22 кВт) 4 монтажных отверстия под винт M8 SGDH-3ZDE (400 В, 30 кВт) Охлаждающий вентилятор Воздух 4 монтажных отверстия под винт M8 Охлаждающий вентилятор Воздух 12,5 12,5 459 459 Разъемы пульта управления Разъемы пульта управления CN3 500 475 NS100 500 475 CN3 NS100 167 107 12×4=48 57 5×8=40 480 V 460 V 440 V 400 V 380 V 0 V 142 12 CN6A 46,5 CN1 CN2 74 CN6B CN4 46,5 CN1 CN2 74 CN6B CN4 57 8×5=40 480 V 460 V 440 V 400 V DU DV DW B1 B2 116 DC 24N DC 24P 65 65 — +1 +2 L1/R L2/S L3/T U V W 15 8 12,5 64 25 Силовые клеммы с винтами M3.5 24,5×8=196 320 370 20 47 (25) 128 302 306 348 152 215 52 25 27×8=216 320 370 12,5 20 47 (25) Клеммы заземления с винтами M8 Силовые клеммы с винтами M8 8 15 — +1 +2 L1/R L2/S L3/T U V W 116 380 V 0 V DU DV DW B1 B2 DC 24N DC 24P 142 Разъемы для цепей управления 186 14,5 151 107 12×2=24 12 Разъемы схемы управления CN6A 152 128 302 306 348 215 Силовые Клеммы клеммы заземления Клеммы Силовые с винтами M4 с винтами M8 управления клеммы с винтами M4 с винтами M8 Силовые клеммы с винтами M3,5 Приблиз. масса: 40 кг Силовые клеммы Силовые с винтами M5 клеммы с винтами M4 Клеммы управления с винтами M4 Приблиз. масса: 40 кг SGDH-3GDE (400 В, 37 кВт) 4 монтажных отверстия под винт M8 Охлаждающий вентилятор Воздух 12,5 589 1 2 3 4 Разъемы пульта управления 294 475 12 CN3 NS100 12×2=24 215 8 197 8×5=40 149 40 25 480 V 460 V 440 V 400 V 380 V 0 V 259 14,5 CN6B 46,5 74 CN1 CN2 CN4 65 56,5 — +1 +2 L1/R L2/S L3/T U V W 12,5 17,5 116 DB DB ON 24 DU DV DW B1 B2 DC 24N DC 24P 142 Разъемы для цепей управления CN6A 25 70 45×8=360 450 500 Клеммы управления с винтами M3.5 Клеммы Силовые Силовые управления клеммы с винтами M4 с винтами M4 клеммы с винтами M5 (25) 128 302 306 348 174 215 Клеммы заземления с винтами M8 Силовые клеммы с винтами M3.5 Силовые клеммы с винтами M10 Приблиз. масса: 60 кг SGDH-4EDE/-5EDE (400 В, 45/55 кВт) 4 монтажных отверстия под винт M8 12,5 639 1 2 3 4 Охлаждающий вентилятор Воздух Разъемы пульта управления 353 475 12 CN3 NS100 311 265 247 199 40 25 65 56,5 — 19 12×2=24 8 CN6B 8×5=40 480 V 460 V 440 V 400 V 380 V 0 V 46,5 74 CN4 CN1 CN2 +1 +2 L1/R L2/S L3/T U V W 12,5 122 25 45×8=360 500 550 Силовые Силовые клеммы клеммы с винтами M4 с винтами M6 17,5 116 DB DB ON 24 DU DV DW B1 B2 DC 24N DC 24P 142 Разъемы для цепей управления CN6A (25) 128 302 306 348 204 215 Клеммы Клеммы заземления Силовые управления с винтами M8 клеммы с винтами M3,5 с винтами M3,5 Силовые Клеммы клеммы управления с винтами M4 с винтами M10 Приблиз. масса: 65 кг 10 Сервосистемы переменного тока Фильтры R88A-FIW104-SE Ед. изм.: мм (дюйм) 32 (1,26) 1 (0,04) R88A-FIW4006-SE, R88A-FIW4010-SE Модель R88A-FIW4006-SE R88A-FIW4010-SE 28,25 (1,11) 56 (2,20) φ5 (φ0,20) +0,20 240 +5 ) 0 (9,45 0 M4(2x) 5,5 (0,22) 14 (0,55) провода AWG16 GNYE M4 +0,20 265 +5 0 (10,43 0 ) 6 (0,24) φ10 (φ0,39) 33 (1,30) 5 (0,20) M4 11,5 (0,45) 202 (7,95) 192 (7,56) 149,5 (5,89) Размеры A в мм (дюймах) B C D E F G H 32 (1,26) 16 (0,63) 202 (7,95) 192 (7,56) 150 (5,91) 300 (11,81) 70 (2,76) 168 (6,61) 35 (1,38) 18 (0,71) 291 (11,46) 281 (11,06) 239 (9,41) 270 (10,63) 90 (3,54) 257 (10,12) Ед. изм.: мм (дюйм) 19 (0,75) 168 (6,61) 15 (0,59) A B 70 (2,76) R88A-FIW107-SE, R88A-FIW115-SE Модель R88A-FIW107-SE R88A-FIW115-SE 28 (1,10) C D E 5 (0,20) Размеры в мм A B C D E 75 240+5 50 12 1 90 300+5 60 15 1,2 19 (0,75) M4 (4x) +0,20 310 +5 ) 0 (12,20 0 118 (4,65) M4 φ5 (φ0,20) φ10 (φ0,39) Ед. изм.: мм 5,5 (0,22) провода AWG16 GNYE M4 G 32 E 28 202 192 150 19 (0,75) F 14 (0,55) H 15 (0,59) R88A-FIW4020-SE D Ед. изм.: мм (дюйм) 40 (1,57) A φ5 M4 (2x) C M4 5 20 (0,79) 5,5 14 φ10 провода AWG16 302 (11,89) 285 (11,22) 7,5 (0,30) 8,5(0,33) B GNYE 140 (5,51) 125 (4,92) M4 70 19 168 15 114 (4,49) φ10 φ5,5 (φ0,39) (φ0,22) M5 M5 +0,20 350 +5 0 (13,78 0 ) R88A-FIW125-SE Ед. изм.: мм (дюйм) 35 (1,38) +0,20 580 +5 0 (22,83 0 ) +0,20 370 +5 ) 0 (14,57 0 M5 gb/gr AWG 20 24,5 (0,96) 18 (0,71) 1,2 (0,05) AWG 14 24,5 (0,96) 291 (11,46) 281 (11,06) 239 (9,41) 238,5 (9,39) 253 (9,96) 19 (0,75) 28 (1,10) 10 (0,39) R88A-FIW4030-SE Ед. изм.: мм (дюйм) +0,20 250 +5 0 (9,84 0 ) 5 (0,20) 100 (3,94) 80 (3,15) M5 φ10 (φ0,39) M4(4x) 25 (0,98) φ5 (φ0,20) 50 (1,97) 118(4,65) AWG 12 405 (15,94) 386 (15,20) 8,5 (0,33) 5,5 (0,22) 265 +5 0 M5 +0,02 245+0,5 ) 0 (9,65 0 5,5 (0,22) 14 (0,55) +0,02 355 +5 ) 0 (13,98 0 провода AWG16 M4 GNYE M4 9,5 (0,37) 90 (3,54) 19 (0,75) 257 (10,12) 15 (0,59) 230 (9,06) 200 (7 ,87) 180 (7 ,09) M5 φ6,5 (φ0,26) M6 26,5 (1,04) 335 (13,19) 352 (13,86) 26,5 (1,04) Сервопривод Sigma-II 6,5 (0,26) φ12 (φ0,47) желтый/зеленый 100 (3,94) L3 80 (3,15) L1 L2 10 (0,39) 1,2 (0,05) 11 Фильтры R88A-FIW4055-SE Ед. изм.: мм (дюйм) FN359-250-99 65 (2,56) 32,5 (1,28) φ6,5 (φ0,26) 505 (19,88) 487 (19,17) 8,5 (0,33) 9 (0,35) под винт M5 (x8) φ12 (φ0,47) +0,20 370 +5 0 (14,57 0 ) 260 (10,24) 220 (8,66) 200 (7,87) Провод AWG6 Желтый/Зеленый M8 6,5 (0,26) M6 M6 M5 435 (17,13) 26,5 (1,04) 452 (17,80) 3 провода AWG6 Черный Цифровая панель управления JUSP-OP02A-2 2 монт. отв. диам. 4,5 (0,18) Ед. изм.: мм (дюйм) 63 (2,48) 50 (1,97) 18,5 (0,73) 7 (0,28) 26,5 (1,04) FN258-180-07 50 мм2 80 125 (4,92) 500 15 YASKAWA 438 6,5 413 110 400 240 4 M10 39 (1,54) 29,5 (1,16) Внешние тормозные блоки резисторов Модель W H D М1 М2 Приблиз. вес, кг Модули динамического торможения Модель H М2 Приблиз. вес, кг JUSP-RA18 JUSP-RA19 JUSP-RA12 JUSP-RA13 JUSP-RA14 JUSP-RA15 JUSP-RA16 220 300 259 259 484 484 484 350 350 500 500 500 500 500 92 95 348 348 348 348 348 180 250 200 200 425 425 425 335 335 485 485 485 485 485 4 7 14 14 20 21,5 23,5 JUSP-DB03 JUSP-DB04 JUSP-DB05 JUSP-DB06 400 400 400 490 (8) (0,31) 26 (1,02) 385 385 385 475 135 (5,31) 5 6 6 7 Вентиляционные отверстия Лицевая панель 4 монт. отв. M5 М2 H М2 H Клеммы силовых цепей 184 73 187 259 Кабельный ввод (с резиновой втулкой диам. 33 мм) 62 75 124 7,5 М1 W D 12 Сервосистемы переменного тока Монтаж Однофазный сервопривод на напряжение 230 В~ Однофазное напряжение 200…230 В~ Фильтр подавления помех Питание Питание ВЫКЛ ВКЛ Защита от аварий Обязательно установите ограничитель перенапряжений на катушку возбуждения электромагнитного контактора и реле 4 Серводвигатель Сервопривод SGDH Оптический энкодер Обязательно заземлите Задание скорости (╠2 … ╠10 В/номинальная скорость двигателя) Задание момента (╠1 … ╠10 В/номинальный момент) 1 Разделайте конец экранированного провода надлежащим образом 1 Выход кода аварии Макс. рабочее напряжение: 30 В = Макс. рабочий ток: 20 мА = Задание положения Напряжение питания выходов с открытым коллектором Батарея резервного ∗2 питания (2,8 … 4,5 В) Входы для сигнала SEN ∗2 Выход коэффициента деления энкодера (PG) Подходящий приемный усилитель, например, SN75175 производства Texas Instruments или эквивалентный, совместимый с MC3486 Количество периодов в канале S Последовательный интерфейс передачи данных Подходящий приемный усилитель, например, SN75175 производства Texas Instruments или эквивалентный, совместимый с MC3486 3 Включение сервопривода (включение сервопривода при ВКЛ) П-регулятор (П-регулирование при ВКЛ) Запрет прямого хода (запрет при ВЫКЛ) Запрет обратного хода (запрет при ВЫКЛ) Сброс аварии (сброс при ВКЛ) Граничный ток в прямом направлении (ограничение при ВКЛ) Граничный ток в обратном направлении (ограничение при ВКЛ) Подсоединяет экран к корпусу разъема. Обнаружение согласования скорости (ВКЛ при согласовании скорости) Выход сигнализации вращения (ВКЛ, когда скорость двигателя превышает установленное значение) Выход готовности сервопривода (ВКЛ при готовности) Выход аварии сервопривода (ВЫКЛ при аварии) Выходы с оптронной развязкой Макс. рабочее напряжение: 30 В = Макс. рабочий ток: 50 мА = *1 *2 *3 *4 *5 *6 Постоянная времени фильтра первичной цепи составляет 47 мкс. Подключите при использовании абсолютного энкодера. Используется только с абсолютным энкодером. Тормозной резистор может быть подсоединен между B1 и B2. Для приводов SGDH-08AE-S-OY и SGDH-15AE-S-OY напряжение должно находиться в пределах от 220 до 230 В~ (+10 % -15 %). TI = Texas Instruments Inc. Сервопривод Sigma-II 13 Трехфазный сервопривод на напряжение 400 В~ (до 15 кВт) Трехфазное напряжение 380…480 В~ L1 L2 L3 Фильтр подавления помех Питание Питание Защита от аварий ВЫКЛ ВКЛ Обязательно установите ограничитель перенапряжений на катушку возбуждения электромагнитного контактора и реле 4 Серводвигатель *5 Напряжение питания Сервопривод SGDH Оптический энкодер Обязательно заземлите Задание скорости (╠2 … ╠10 В/номинальная скорость двигателя) Задание момента (╠1 … ╠10 В/номинальный момент) 1 Разделайте конец экранированного провода надлежащим образом 1 Выход кода аварии Макс. рабочее напряжение: 30 В = Макс. рабочий ток: 20 мА = Задание положения Напряжение питания выходов с открытым коллектором ∗ Батарея резервного 2 питания(2,8 … 4,5 В) ∗2 Входы для сигнала SEN Выход коэффициента деления энкодера (PG) Подходящий приемный усилитель, например, SN75175 производства Texas Instruments или эквивалентный, совместимый с MC3486 Количество периодов в канале S Последовательный интерфейс передачи данных Подходящий приемный усилитель, например, SN75175 производства Texas Instruments или эквивалентный, совместимый с MC3486 3 Включение сервопривода (включение сервопривода при ВКЛ) П-регулятор (П-регулирование при ВКЛ) Запрет прямого хода (запрет при ВЫКЛ) Запрет обратного хода (запрет при ВЫКЛ) Сброс аварии (сброс при ВКЛ) Граничный ток в прямом направлении (ограничение при ВКЛ) Граничный ток в обратном направлении (ограничение при ВКЛ) Подсоединяет экран к корпусу разъема. Обнаружение согласования скорости (ВКЛ при согласовании скорости) Выход сигнализации вращения (ВКЛ, когда скорость двигателя превышает установленное значение) Выход готовности сервопривода (ВКЛ при готовности) Выход аварии сервопривода (ВЫКЛ при аварии) Выходы с оптронной развязкой Макс. рабочее напряжение: 30 В = Макс. рабочий ток: 50 мА = *1 *2 *3 *4 Постоянная времени фильтра первичной цепи составляет 47 мкс. Подключите при использовании абсолютного энкодера. Используется только с абсолютным энкодером. Тормозной резистор может быть подсоединен между B1 и B2. (Для приводов на 6/7,5/11/15 кВт подключение блока тормозных резисторов обязательно) *5 Должен быть предусмотрен внешний источник питания +24 В. *6 TI = Texas Instruments Inc. 14 Сервосистемы переменного тока Трехфазный сервопривод на напряжение 400 В~ (от 22 кВт до 55 кВт) +10 Трехфазное напряжение 380…460 В~ -15 % (50/60 Гц) R 1MCCB S T Фильтр подавления помех Напряжение питания ВКЛ Аварийная защита и тепловая защита двигателя ВКЛ/ВЫКЛ питания (Устанавливайте ограничители перенапряжений на магнитные контакторы и реле) 1MC +10 Трехфазное напряжение 380…460 В~ -15 % (50/60 Гц) ВЫКЛ 1MC SUP Блок тормозных *5 резисторов Дроссель пост. тока (клеммы обычно зашунтированы) M A B C D Двигатель вентилятора 1 N P B2 1MC L1/R L2/S L3/T 480 В 460 В 440 В 400 В 380 В 0В DC24P 24 В= DC24N B1 +1 +2 U V W Сервопривод SGDH Подайте напряжение питания на клеммы, наиболее подходящие по номиналу. M Тепловая защита двигателя S Двигатель 1b Оптический энкодер CN2 PG Правильно подключайте конец экранированного кабеля. DU DV DW CN1 V-REF DU DV DW 5 6 9 10 Задание скорости Задание момента (╠1 В … ╠ 10 В/Номинальный момент) Напряжение питания для входов задания скорости и момента (Макс. выходной ток: 30 мА=) Задание положения PULS CW Канал A *2 LPF *2 LPF A/D DBON DB24 DBON DB24 Модули динамического торможения (См. информацию по динамическому торможению) P*1 SG T-REF P SG 16 { +12 В -12 В 23 24 7 8 11 12 13 14 21 22 4 2 47 40 41 43 42 44 46 45 +12 В -12 В Контроль крутящего момента TRQ-M (2 В/100%) VTG-M Контроль скорости 17 PULS P *PULS SIGN P *SIGN CLR P *CLR BAT+ P BATSEN P 0В SG 37 38 39 ALO1 ALO2 ALO3 ( 2 В/1000 мин-1 или 1 В/1000 мин-1 ) SIGN CCW Канал В Выход кода аварии Макс. рабочее напряжение: 30 В= Макс. рабочий ток: 20 мА= CLR 33 34 35 36 19 20 4,7 кОм 5 мА Cервопривод ВКЛ Батарея подпитки *3 2,8 … 4,5 В +5 В + — Вход сигнала SEN *3 +24 В 1Ry Включение сервопривода при 1Ry = ВКЛ П-регулирование при 2Ry = ВКЛ +24 В SV-ON P-CON N-OT P-OT ALM-RST N-CL P-CL 48 49 PAO *PAO PBO *PBO PCO *PCO PSO *PSO Выход деления частоты энкодера (PG) Приемный усилитель (производство TI) SN75175, MC3486 или эквивалентный Последовательный интерфейс передачи данных *4 о количестве периодов (оборотов) в канале S Приемный усилитель (производство TI) SN75175, MC3486 или эквивалентный (ВКЛ при согласовании скорости) (ВКЛ при завершении позиционирования) Выход TGON (ВКЛ при превышении уровня) Выход готовности сервопривода (ВКЛ при готовности привода) Выход сигнализации ошибок (ВЫКЛ при возникновении ошибки) Выход с оптронной развязкой рабочее напряжение: 30 В= (Макс. ) Макс. рабочий ток: 50 мА= 0V SG П-регулирование Вращ. в обратном направл. запрещ. Вращ. в прямом направл. запрещ. Сброс аварии Регулир. тока в обратном направл. ВКЛ Регулир. тока в прямом направл. ВКЛ 2Ry N-LS 25 26 Запрет обратного вращения при N-LS = ВЫКЛ V-CMP+ (COIN+) V-CMP(COIN-) P-LS Запрет прямого вращения при P-LS = ВЫКЛ 3Ry Сброс аварии при 3Ry = ВКЛ 27 28 29 30 31 32 6Ry Включение регулирования тока в обратном направлении при 6Ry = ВКЛ Включение регулирования тока в прямом направлении при 7Ry = ВКЛ TGON+ TGONS-RDY+ S-RDYALM+ ALM- 7Ry *1 *2 *3 *4 *5 *6 P обозначает витую пару Постоянная времени первичного фильтра 47 мкс Подключается при использовании абсолютного энкодера. Эффективно при использовании 12-битного абсолютного энкодера. Блок тормозных резисторов (опция) монтируется снаружи. TI = Texas Instruments Inc. 50 FG Подключить к экрану. Корпус разъема также соединяется с FG. Сервопривод Sigma-II 15 Ordering Information Состав сервосистемы C Сервопривод Батарея для абсолютного энкодера серии Sigma-II SERVOPACK K L D Дополнительный блок NS115 S W 1 A R S W 2 Кабель для аналоговых сигналов контроля SGDH-08AE-S-OY Ver. 400V Цифровая панель управления M C N 6 A 1- Mechatrolink-I/II 2- DeviceNet 3- Profibus 4- Контроллер управления перемещениями 5- Модуль шагового перемещения MODE/SET CHARGE DATA/ POWER Персональный компьютер (для более мощных приводов) L1 CN3 C N 6 B Фильтр O P Q L2 +1 +2 N CN1 (для более мощных приводов) Внешний тормозной резистор Резистор динамического торможения L1C L2C B1 B2 U V W Модуль управления перемещениями C N 4 E Входные/ выходные сигналы G Промежуточный блок F H Модуль управления позиционированием CN2 Кабель общего назначения I J Клеммный блок B B A Серводвигатель SGMAH/SGMPH A Серводвигатель SGMGH/SGMSH/SGMUH/SGMBH A Линейный серводвигатель SGLG 0} A Линейный серводвигатель SGLF 0} Линейный серводвигатель SGLT A Подробную информацию смотрите в техническом описании поворотных двигателей Sigma-II Подробную информацию смотрите в техническом описании линейных двигателей Sigma Примечание: Цифры ABCDE… указывают рекомендуемую последовательность выбора компонентов сервосистемы Sigma-II Серводвигатели, кабели электропитания и кабели для подключения энкодеров Примечание: AB Подробную информацию о характеристиках и выборе двигателей смотрите в техническом описании серводвигателей Сервоприводы Обознач. Номинальные параметры Модель Совместимые поворотные серводвигатели A Совместимые линейные двигатели A C 1-фазн. 200 В~ 3-фазн. 400 В~ SGLGW-30A050@ SGLGW-30A080@, SGLGW-40A140@ SGLFW-20A@, SGLFW-35A120@, SGLGW-40A253A@,SGLGW-60A140@ 400 Вт SGDH-04AE-OY SGMAH-04A@, SGMPH-04A@ SGLGW-40A365A@, SGLGW-60A253A@ 750 Вт SGDH-08AE-S-OY SGMAH-08A@, SGMPH-08A@ SGLFW-35A230@, SGLFW-50A200@, SGLGW-60A365A@ 1500 Вт SGDH-15AE-S-OY SGMPH-15A@ SGLFW-50A380@, SGLFW-1ZA200@, SGLGW-90A200A@ 0,5 кВт SGDH-05DE-OY SGMGH-05D@, SGMAH-03D@, SGMPH-02D@/04D@ SGLFW-35D@ 1,0 кВт SGDH-10DE-OY SGMGH-09D@, SGMSH/UH-10D@, SGMAH-07D@, SGLFW-50D200@, SGLTW-35D170@, SGMPH-08D@ SGLTW-50D170@ 1,5 кВт SGDH-15DE-OY SGMGH-13D@, SGMSH/UH-15D@, SGMPH-15D@ SGLFW-50D380@, SGLFW-1ZD200@ 2 кВт SGDH-20DE-OY SGMGH-20D@, SGMSH-20D@ SGLFW-1ED380@,SGLTW-35D320@, SGLTW-50D320@ 3 кВт SGDH-30DE-OY SGMGH-30D@, SGMSH/UH-30D@ SGLFW-1ZD380@, SGLFW-1ED560@, SGLTW-40D400@ 5 кВт SGDH-50DE-OY SGMGH-44D@, SGMSH/UH-40D@, SGMSH-50D@ SGLTW-40D60@, SGLTW-80D400@ 6 кВт SGDH-60DE-OY SGMGH-55D@ 7,5 кВт SGDH-75DE-OY SGMGH-75D@ SGLTW-80D600@ 11 кВт SGDH-1ADE-OY SGMGH-1AD@ 15 кВт SGDH-1EDE-OY SGMGH-1ED@ 22 кВт SGDH-2BDE SGMBH-2BD@ 30 кВт SGDH-3ZDE SGMBH-3ZD@ 37 кВт SGDH-3GDE SGMBH-3GD@ 45 кВт SGDH-4EDE SGMBH-4ED@ 55 кВт SGDH-5EDE SGMBH-5ED@ — 30 Вт 50 Вт 100 Вт 200 Вт SGDH-A3AE-OY SGDH-A5AE-OY SGDH-01AE-OY SGDH-02AE-OY SGMAH-A3A@ SGMAH-A5D@ SGMAH-01A@, SGMPH-01A@ SGMAH-02A@, SGMPH-02A@ 16 Сервосистемы переменного тока Дополнительные модули (для CN10) Обознач. Название Модель D 1.5-осный многофункциональный контроллер управления перемещениями с интерфейсом Host Link 1.5-осный многофункциональный контроллер управления перемещениями с интерфейсом DeviceNet Модуль интерфейса MECHATROLINK-I Модуль интерфейса MECHATROLINK-II Модуль интерфейса DeviceNet с функциями позиционирования Модуль интерфейса PROFIBUS-DP с функциями позиционирования Модуль шагового перемещения. Универсальное позиционирование ╚от точки к точке╩. R88A-MCW151-E R88A-MCW151-DRT-E JUSP-NS100 JUSP-NS115 JUSP-NS300 JUSP-NS500 JUSP-NS600 Примечание: D Подробную информацию о характеристиках и выборе смотрите в описании дополнительных устройств для сервопривода Кабели управления (для CN1) Обознач. Описание Для подключения к Модель E Кабель управления (для 1 оси) Кабель управления (для 2 осей) Клеммный блок (для 4 осей) Кабель подключения сервопривода (для 1 оси) Кабели для подключения модуля ПЛК (для 4 осей) Модули многоосного управления перемещениями 1 м CS1W-MC221 2м CS1W-MC421 3м C200H-MC221 5м Модули многоосного управления перемещениями 1 м CS1W-MC221 2м CS1W-MC421 3м C200H-MC221 5м Модуль многоосного управления перемещениями C200HW-MC402-E 1м 1м 1м Модуль управления позиционированием CS1W-NC1@3, CJ1W-NC1@3 или C200HW-NC113 Модуль управления позиционированием CS1W-NC2@3/4@3, CJ1W-NC2@3/4@3 или C200HW-NC213/413 CQM1H-PLB21 CQM1-CPU43 CJ1M-CPU22/23 Промежуточные блоки XW2B-@0J6-@B C200H-NC112 C200H-NC211 CQM1-CPU43-V1 и CQM1H-PLB21 CS1W-NC113 и C200HW-NC113 CS1W-NC213/413 и C200HW-NC213/413 CS1W-NC133 CS1W-NC233/433 CJ1W-NC113 CJ1W-NC213/413 CJ1W-NC133 CJ1W-NC233/433 CJ1M-CPU22/23 1м 2м 0,5 м 1м 0,5 м 1м 0,5 м 1м 0,5 м 1м 0,5 м 1м 0,5 м 1м 0,5 м 1м 0,5 м 1м 0,5 м 1м 0,5 м 1м 0,5 м 1м 0,5 м 1м 1м 2м R88A-CPW001M1 R88A-CPW002M1 R88A-CPW003M1 R88A-CPW005M1 R88A-CPW001M2 R88A-CPW002M2 R88A-CPW003M2 R88A-CPW005M2 R88A-TC04-E R88A-CMUK001J3-E2 R88A-CMX001S-E R88A-CMX001J1-E XW2B-20J6-1B (для 1 оси) F Промежуточный блок XW2B-40J6-2B (для 2 осей) XW2B-20J6-3B (для 1 оси) XW2B-20J6-8A (для 1 оси) XW2B-40J6-9A (для 2 осей) XW2Z-100J-B4 XW2Z-200J-B4 XW2Z-050J-A1 XW2Z-100J-A1 XW2Z-050J-A2 XW2Z-100J-A2 XW2Z-050J-A3 XW2Z-100J-A3 XW2Z-050J-A6 XW2Z-100J-A6 XW2Z-050J-A7 XW2Z-100J-A7 XW2Z-050J-A10 XW2Z-100J-A10 XW2Z-050J-A11 XW2Z-100J-A11 XW2Z-050J-A14 XW2Z-100J-A14 XW2Z-050J-A15 XW2Z-100J-A15 XW2Z-050J-A18 XW2Z-100J-A18 XW2Z-050J-A19 XW2Z-100J-A19 XW2Z-050J-A27 XW2Z-100J-A27 R88A-CPW001S или JZSP-CKI01-1 R88A-CPW002S или JZSP-CKI01-1 R88A-CTW001N R88A-CTW002N XW2B-50G5 G H Кабель для подключения к сервоприводу Кабель для подключения к модулю управления позиционированием I Кабель управления Для подключения к контроллерам общего назначения J Кабель для промежуточного/ клеммного блока Промежуточный/ клеммный блок Для подключения к контроллеру общего назначения 1м 2м — Сервопривод Sigma-II 17 Батарея резервного питания абсолютного энкодера (для CN8) Обознач. Название Модель Дополнительные принадлежности (для CN3) Обознач. Название Модель K Батарея для приводов от 30 Вт до 5 кВт JZSP-BA01 Батарея для приводов от 6 кВт до 15 кВт JZSP-BA01-1 M N Кабель (для CN5) Обознач. Название Модель Модуль настройки параметров с кабелем JUSP-OP02A-2 или R88A-PR02W Кабель для подключения к компьютеру R88A-CCW002P2 или JZSP-CMS02 L Кабель аналоговых сигналов контроля R88A-CMW001S или DE9404559 Фильтры Обознач. Подходящий сервопривод Модель фильтра Номинальный ток Номинальное напряжение O SGDH-A3AE-OY,SGDH-A5AE-OY, SGDH-01AE-OY, SGDH-02AE-OY SGDH-04AE-OY SGDH-08AE-S-OY SGDH-15AE-S-OY SGDH-05DE-OY, SGDH-10DE-OY, SGDH-15DE-OY SGDH-20DE-OY, SGDH-30DE-OY SGDH-50DE-OY SGDH-60DE-OY, SGDH-75DE-OY SGDH-1ADE-OY, SGDH-1EDE-OY SGDH-2BDE, SGDH-3ZDE, SGDH-3GDE SGDH-4EDE, SGDH-5EDE R88A-FIW104-SE R88A-FIW107-SE R88A-FIW115-SE R88A-FIW125-SE R88A-FIW4006-SE R88A-FIW4010-SE R88A-FIW4020-SE R88A-FIW4030-SE R88A-FIW4055-SE FN258-180-07 FN359-250-99 4A 7A 15 A 25 A 6A 10 A 20 A 30 A 55 A 180 A 250 A 250 В~ 1-фазн. 400 В~ 3-фазн. Внешний тормозной резистор Обознач. Подходящий сервопривод Модель блока тормозных резисторов Номинальные параметры Модуль динамического торможения Обознач. Модель сервопривода P SGDH-60DE-OY … -75DE-OY SGDH-1ADE-OY … -1EDE-OY SGDH-2BDE SGDH-3ZDE SGDH-3GDE SGDH-4EDE SGDH-5EDE JUSP-RA18 JUSP-RA19 JUSP-RA12 JUSP-RA13 JUSP-RA14 JUSP-RA15 JUSP-RA16 18 Ом, 880 Вт Модель модуля динамического торможения Характеристики (схема ╚звезды╩) Q 14,25 Ом, 1760 Вт 9 Ом, 3600 Вт 6,7 Ом, 3600 Вт 5 Ом, 4800 Вт 4 Ом, 6000 Вт 3,8 Ом, 7200 Вт SGDH-2BDE, SGDH-3ZDE SGDH-3GDE SGDH-4EDE SGDH-5EDE JUSP-DB03 JUSP-DB04 JUSP-DB05 JUSP-DB06 180 Вт, 0,8 Ом 180 Вт, 0,8 Ом 180 Вт, 0,8 Ом 300 Вт, 0,8 Ом Разъемы Описание Модель Разъем для входов/выходов управления (для CN1) Разъем для энкодера привода Sigma-II (для CN2) Разъем интерфейса связи (для CN3) Разъем электропитания Hypertac в исп. IP67 (для двигателей SGMAH/PH-@@A@@@@D-OY на напряжение 200 В) Разъем электропитания Hypertac в исп. IP67 (для двигателей SGMAH/PH-@@D@@@@D-OY на напряжение 400 В) Разъем энкодера Hypertac в исп. IP67 (для двигателей SGMAH/PH-@@@@@@@D-OY) Разъем электропитания в военном исполнении, IP67 (для двигателей SGMGH-(05/10/13)D@, SGMSH-(10/15/20)D@ , SGMUH-(10/15)D@) на напряжение 400 В) (для вентилятора SGMBH-@ ) Разъем электропитания в военном исполнении, IP67 (для двигателей SGMGH-(20/30/44)D@, SGMSH-(30/40/50)D@, SGMUH-(30/40)D@ на напряжение 400 В) Разъем электропитания в военном исполнении, IP67 (для двигателей SGMGH-(55/75/1A/1E)D@ на напряжение 400 В) Разъем для тормоза в военном исполнении, IP67 (для серводвигателей SGMGH-@, SGMSH-@, SGMUH-@ на напряжение 400 В) Разъем для энкодера в военном исполнении, IP67 (для двигателей SGMGH-@, SGMSH-@, SGMUH-@, SGMBH-@) R88A-CNU11C или JZSP-CKI9 JZSP-CMP9-1 R7A-CNA01R SPOC-06K-FSDN169 LPRA-06B-FRBN170 SPOC-17H-FRON169 MS3108E18-10S MS3108E22-22S MS3108E32-17S MS3108E10SL-3S MS3108E20-29S Программное обеспечение для компьютера Описание Модель Программный инструмент для конфигурирования и контроля серводвигателей и инверторов. (CX-Drive версии 1.11 или выше) Полный программный пакет от компании Omron, включающий CX-Drive. (CX-One версии 1.1 или выше) CX-DRIVE CX-ONE 18 Сервосистемы переменного тока Сервопривод Sigma-II 19 Cat. No. 148E-RU-01 В целях улучшения качества продукции технические характеристики могут быть изменены без уведомления. Российский Центр по ремонту преобразователей частоты 198095, Россия, Санкт-Петербург, Химический пер., 1/2 Тел.: +7 812 252 78 45 Фaкc.: +7 812 252 78 45/+7 812 252 39 80 repair@rakurs.com POCCИЯ Прeдcтaвитeльcтвo Oмpoн Элeктрoникc 123557, Poccия, Mocквa, Cpeдний Tишинcкий пepeyлoк, дoм 28, oфиc 728 Тел.: +7 495 745 26 64, 745 26 65 Фaкc.: +7 495 745 26 80 www.omron.ru 20 Сервосистемы переменного тока
Нужна инструкция к частотнику OMRON SGDH -15DE-OY. Стр. 1 → | 3 И если он сел,то надо по новой настраивать сервопривод.
Нужна инструкция к частотнику OMRON SGDH -15DE-OY. Да и когда крутишь движок с кнопок сервопривода -ничего не вибрирует.

SGDH- @
OMRON Sigma II Сервопривод Sigma II (Omnuc W) Сервопривод Sigma II (Omnuc W — старое название серии) компании OMRON предназначено для оптимального управления скоростью и положением подвижных деталей механизмов. Реализованные на базе 32-разрядного RISC-процессора, сервосистемы обеспечивают оптимальное регулирование по току и по скорости и снабжены функцией оперативной автоматической подстройки. Эта функция в процессе работы непрерывно адаптирует параметры управления к изменяющимся условиям нагрузки и обеспечивает превосходные динамические характеристики. Благодаря этой функции сервосистемы OMRON соответствуют самым строгим требованиям современных высокоточных промышленных систем, включая системы упаковки, станки подготовки высокоточного инструмента, манипуляторы поточных линий полупроводниковых схем, а также сверлильные станки для печатных плат и фасонно-фрезерные станки. OMRON Sigma II — это полный модельный ряд сервоприводов — от одно- и трехфазных сервоприводов с напряжением питания 230 В до трехфазных сервоприводов с напряжением питания 400 В, со скоростью вращения от 1000 до 6000 оборотов в минуту и мощностью от 30 Вт до 15 кВт. Кроме того, для оптимизации работы заказчика, компания OMRON предлагает широкий выбор кабелей питания, приводов и фильтров. Высокая точность, высокая производительность Двигатели этой серии надежны, динамичны, обеспечивают высокую точность и высокую производительность. Выпускаются двигатели со скоростью вращения до 6000 оборотов в минуту и с диапазоном управления скоростью 1:5000, точностью задания вращающего момента 2% и кратковременной допустимой нагрузкой 312%. Компактность Пространство для размещения двигателя и привода значительно сокращено. Такая компактность достигается за счет технологии поверхностного монтажа и минимального использования внутренней проводки. Характеристики семейства Sigma II (Omnuc W) превосходят промышленные стандарты на габариты и удельную мощность для устройств своего класса типоразмеров, обеспечивая максимальную производительность станков и линий заказчика при сверхкомплектности и минимальных затратах. Сокращение количества соединений и проводов Разработав передовую последовательную связь между приводом и датчиком положения, компания OMRON сократила число проводов между сервоприводом и датчиком положения серводвигателя. Число проводов сократилось для импульсного датчика положения серводвигателя с 9 всего до 5 проводов, а для абсолютного датчика положения — с 15 до 7 проводов. Плавная бесшумная работа Все сервоприводы семейства Sigma II (Omnuc W) имеют резонансную схему фильтрации, которая нейтрализует высокочастотный механический шум. Предусмотрена эталонная схема фильтрация вращающего момента, которая автоматически подавляет резонанс оси. Все сервоприводы компании OMRON обеспечивают мгновенную компенсацию выявленных вибраций. Эти функции гарантируют плавную и бесшумную работу всех сервосистем компании OMRON. Соответствие классу защиты IP 67 Компания OMRON предоставляет на выбор ряд двигателей и кабельных разъемов, которые изолированы в соответствии со стандартом на класс защиты IP 67.
Конструкция сервоприводов серии Sigma II исключает компромиссы между качеством, надежностью или функциональностью. Отличаясь повышенной.
CX-Drive – для настройки и обслуживания инверторов и сервоприводов. Регулирование и переключение. • CX-Process – для ПЛК-модулей управления.
Сервопривод Omron Sigma 2 Компоненты для промышленной автоматизации OMRON. Сервоприводы OMRON.
